

Propeller OSD Drone
 Perry
Posts: 253
Perry
Posts: 253
GPS On Screen Drone
General Description
Heads up navigational display for model airplane enthusiasts.
Terry Hitt's video overlay driver combined with the propellers graphic engine allows the dynamic display of indicators, dials, and gauges for heads up presentation of GPS and accelerometer data.
The system updates a double buffered display 10 times per second. To further smooth the presentation an 8 pole moving average is kept of accelermoters, latitude, longitude, and elevation data.
A flashing spot indicates the position of the craft relative to start position.
When distance to home is greater than 49 meters a flashing line on the compass indicates heading to take to return to start position
When distince to home is greater than 499 meters the relative position is zoomed out 10x
The system consists of the following major parts
Parallax propeller proto board
LM1881 for controlling the video overlay as per Terry Hitts Propeller OSD
Hitachi H48C Tri-Axis Accelerometer Module Parallax #28026
accelerometers use the MCP3208 8 channel A/D driver MCP3208.
spin code: 'ok := accel.start(5,4,3,7)"
TTl GPS module like Parallax #28146
GPS is on the mouse port
serXmit = 25 ' Serial Transmit on mouse
serRecv = 24 ' Serial Receive on mouse
spin code: "ok := uart.start(serRecv,serXmit,0,4800)"
NTSC Video Camera
900MHz video TX / RX
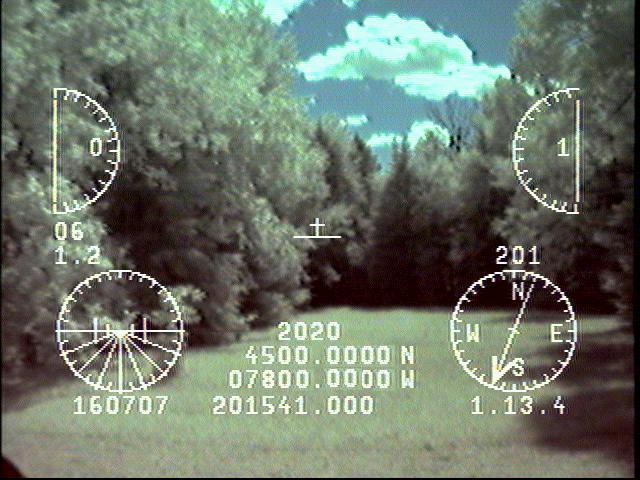
Screen Display
from upper left you see
speedometer
number of satellites
Horizontal Dilution Of Position
artificial horizon
from upper right you see
altimeter
compass
at center is the airplane attitude display and flashing position spot
below is distance to home in meters
then latitude and longitude are displayed
at bottom line we find the date, GMT time, and elapsed time
Operational Timing
There are two jumpers to modify display parameters.
Jumper on I/O port 0 sets kpm/mph speedometer display
Jumper on I/O port 1 sets high/low speedometer display
After reset, durining the initial 11 seconds of operation the unit displays the jumper settings for km/mph and high/low speed settings, calculated values for meters per latitude and longitude.are shown below.
at the end of this time averages of the first 100 values of accelerometers, altitude, latitude and longitude are saved and the unit is ready for operation
you need at least 4 satellites in view for best operation, the more the better. I use a reset push button switch on a two wire cable plugged into the prop boards programing port and keep reseting the system until satisfied with the inital conditions.
Camera Aiming Decisions
Some notes on camera orientation
the view of the camera may be positioned in several ways,
for operation in a land vehical place airplane attitude display just below the true horizon, or place the true horizon on the artificial horizon gauge.
for best use in the air , place the true horizon near the top of the display,
use artificial horizon to maintain pitch and roll of craft when true horizon is invisible
I have uploaded a video to Youtube called "From Sparrows Park to Eagles Nest" taken from the front window of my car

I am not ready to release the full source yet, I am fishing for some one who wants to collarabate and produce this as a commercial product
The eeprom file is attached, if any one would like some modifications e-mail me at pjm@ridge-communications.ca and I will attempt to accomodate your request
Perry
General Description
Heads up navigational display for model airplane enthusiasts.
Terry Hitt's video overlay driver combined with the propellers graphic engine allows the dynamic display of indicators, dials, and gauges for heads up presentation of GPS and accelerometer data.
The system updates a double buffered display 10 times per second. To further smooth the presentation an 8 pole moving average is kept of accelermoters, latitude, longitude, and elevation data.
A flashing spot indicates the position of the craft relative to start position.
When distance to home is greater than 49 meters a flashing line on the compass indicates heading to take to return to start position
When distince to home is greater than 499 meters the relative position is zoomed out 10x
The system consists of the following major parts
Parallax propeller proto board
LM1881 for controlling the video overlay as per Terry Hitts Propeller OSD
Hitachi H48C Tri-Axis Accelerometer Module Parallax #28026
accelerometers use the MCP3208 8 channel A/D driver MCP3208.
spin code: 'ok := accel.start(5,4,3,7)"
TTl GPS module like Parallax #28146
GPS is on the mouse port
serXmit = 25 ' Serial Transmit on mouse
serRecv = 24 ' Serial Receive on mouse
spin code: "ok := uart.start(serRecv,serXmit,0,4800)"
NTSC Video Camera
900MHz video TX / RX
Screen Display
from upper left you see
speedometer
number of satellites
Horizontal Dilution Of Position
artificial horizon
from upper right you see
altimeter
compass
at center is the airplane attitude display and flashing position spot
below is distance to home in meters
then latitude and longitude are displayed
at bottom line we find the date, GMT time, and elapsed time
Operational Timing
There are two jumpers to modify display parameters.
Jumper on I/O port 0 sets kpm/mph speedometer display
Jumper on I/O port 1 sets high/low speedometer display
After reset, durining the initial 11 seconds of operation the unit displays the jumper settings for km/mph and high/low speed settings, calculated values for meters per latitude and longitude.are shown below.
at the end of this time averages of the first 100 values of accelerometers, altitude, latitude and longitude are saved and the unit is ready for operation
you need at least 4 satellites in view for best operation, the more the better. I use a reset push button switch on a two wire cable plugged into the prop boards programing port and keep reseting the system until satisfied with the inital conditions.
Camera Aiming Decisions
Some notes on camera orientation
the view of the camera may be positioned in several ways,
for operation in a land vehical place airplane attitude display just below the true horizon, or place the true horizon on the artificial horizon gauge.
for best use in the air , place the true horizon near the top of the display,
use artificial horizon to maintain pitch and roll of craft when true horizon is invisible
I have uploaded a video to Youtube called "From Sparrows Park to Eagles Nest" taken from the front window of my car
I am not ready to release the full source yet, I am fishing for some one who wants to collarabate and produce this as a commercial product
The eeprom file is attached, if any one would like some modifications e-mail me at pjm@ridge-communications.ca and I will attempt to accomodate your request
Perry
640 x 480 - 60K

Comments
Checking: http://maps.google.com/maps?f=q&hl=en&geocode=&q=n45+5.3941+w77+51.3860&ie=UTF8&z=12&iwloc=addr&om=1
Post Edited (Fred Hawkins) : 7/18/2007 7:25:39 PM GMT
That is FANTASTIC! and is far beyond what I am perpetually working on. You really know what you are doing!
I know you are pursuing commercialization, so without giving away the secret sauce, can you say how much memory and cogs remain available? I'd definitely buy this if I could splice in extras - like servo control and navigation routines that could:
- fly straight and level
- fly a certain diameter, smooth circle around the current GPS coordinates (for aerial photography, etc)
- come home (my personal favorite)
- in autopilot mode, let the R/C control sticks run other servos than what they normally do (like pan and tilt a camera etc)
Great work !
Paul
but having looked at your effort with R/C passthough for the propeller I think I could implement a return to home function on loss of signal. Thought about giving up on display without video input to do that.
probably could implement those other functions as well. I don't know how much coding you have done but I find when a project is just about complete. there suddenly comes to me new ways to reduce code size and add functions.
I have not actually flown the unit yet. My friend has some 10 year old planes with large wing spans that could easily lift the unit but has been slow getting his electronics back up to snuff.
Perry
Post Edited (Perry) : 7/19/2007 2:02:18 AM GMT
Really cool. I actually worked on something similar for a little while with Brian Carpenter. You might want to PM him to see if he is interested.
If you can do it, create a black border around everything so the white overlay doesn't get washed-out in the light backgrounds.
Bean.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Teacher: What is the difference between ignorance and apathy ?
Student: I don't know and I don't care
Teacher: Correct !
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
www.hittconsulting.com
·
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
E3 = Thought
http://folding.stanford.edu/·- Donating some CPU/GPU downtime just might lead to a cure for cancer! The average PC while browsing the internet typically uses less than 30% of it's potential, why not donate a portion of the rest for cancer resaerch?
I have learned that the altitude on GPS's is not very reliable, going to have to add an atmospheric pressure sensor
also beware some video cameras do not have enough signal to drive the display, probably need a voltage follower to make up for that.
Have Fun
Perry
I was playing with your GPS_IO_mini (GPS NMEA reading code from your OSD Drone compilation) this afternoon found an easily correctable bug. I wanted to use the $GPRMC validation character in my code and now I can. It turns out that the stack space assigned to the GPS_IO_mini was too small and was gargling the beginning of the $GPRMC values. This was corrected by adding two more longs to the stack space in GPS_IO_mini. This worked fine in the GPS_IO_full code.
This gives the input enough room to store the entire NMEA string from processing. Thanks again for the posts!
Paul
attached is my latest source, with 16 waypoints and 4 zoom levels
there is a problem if you go too far from where you ar for waypoints though
I think the spin square root or just my integer logic distance_t_ home can not go above 65000 meters
Perry
On the return to home function you were thinking about adding. Can you get away with just a 3 axis accelerometer for wing leveling(ie pitch roll and yaw control)??(we use 3axis of thermopile sensor on the paparazzi project,ala FMA copilot). and other solutions use 2-3 axis of gyro + 3 axis of accelerometers and possibly 3 axis magnetometers in some cases. would love to see a wing leveling solution that could get away with using 3 axis accelerometers(I am speaking from ignorance here as I dont know if its even possible)?
thanx again for releasing your source, I will be ordering the necessary accelerometer and sync chip and adding to my propeller proto board.and then trying on my new easy star FPV craft just for the instrument panel effect alone.
sparks
I am using an FMA copilot for a wing leveller, as to program size? program overlays from a serial memory device(eeprom or flash)?
sparks
ps will be attempting to develop this further for personal use with my FPV video project..
Post Edited (sparks) : 10/24/2007 9:38:40 AM GMT
Perry
The video was not as useful as hoped but I am posting a few snapshots from it.
Focus was too short, taping camera to wing strut got too much jiggle ...
Perry
Others may find it useful.
Ron
Post Edited (Ron Sutcliffe) : 4/10/2008 1:25:25 AM GMT
My code does it's own waypoints now. There are 7 hard-coded points and waypoint 0 is the reset location.
Perry
Most of the hand held GPs units fully conform to NMEA 0183 rev 2.3 now
$GPRMB and $GRXTE should always be transmitted to conform fully with 2.3
and should update with the 2-sec time frame. The Garmin72 is a good example. Some of the sentences are turned off by default, so that the 2-sec update requirement can be maintained. The garmin72 manual, which you can down load explains this on Page 47 in small print.
There are a few 2.3 USB GPS available now. They are tiny and inexpensive but I guess you would have to use a prop plug to interface it. I will try this when I get a chance. I think I can borrow one from another ship alongside.
I would be very surprised if the Parallax GPS module did not transmit other NMEA sentences.
It could be that the firmware disables these sentences.
I have no experience with Aircraft Autopilots. Marine autoPilots and controllers is my bag.
Your project looks Great.
Ron
Hence no $GPRMB and sub-sets. That's a real pity. It leaves you with a lot
work.
Ron