

Boe-Bot with Wireless ZipZaps Remote Control
 Code Monkey
Posts: 26
Code Monkey
Posts: 26
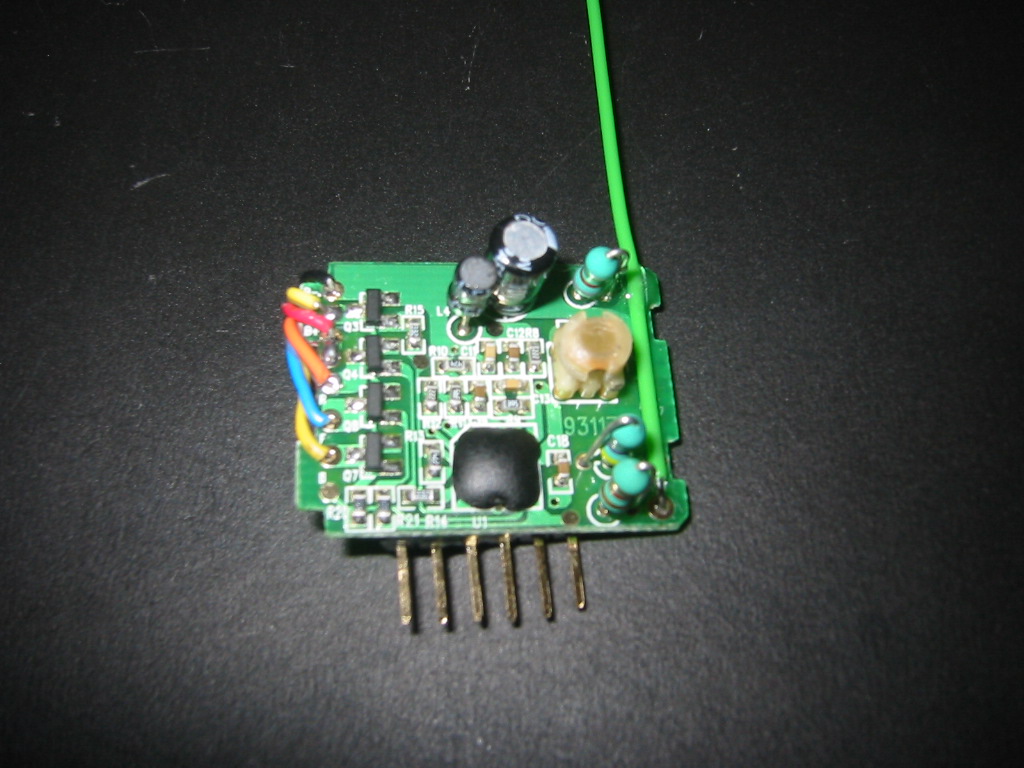
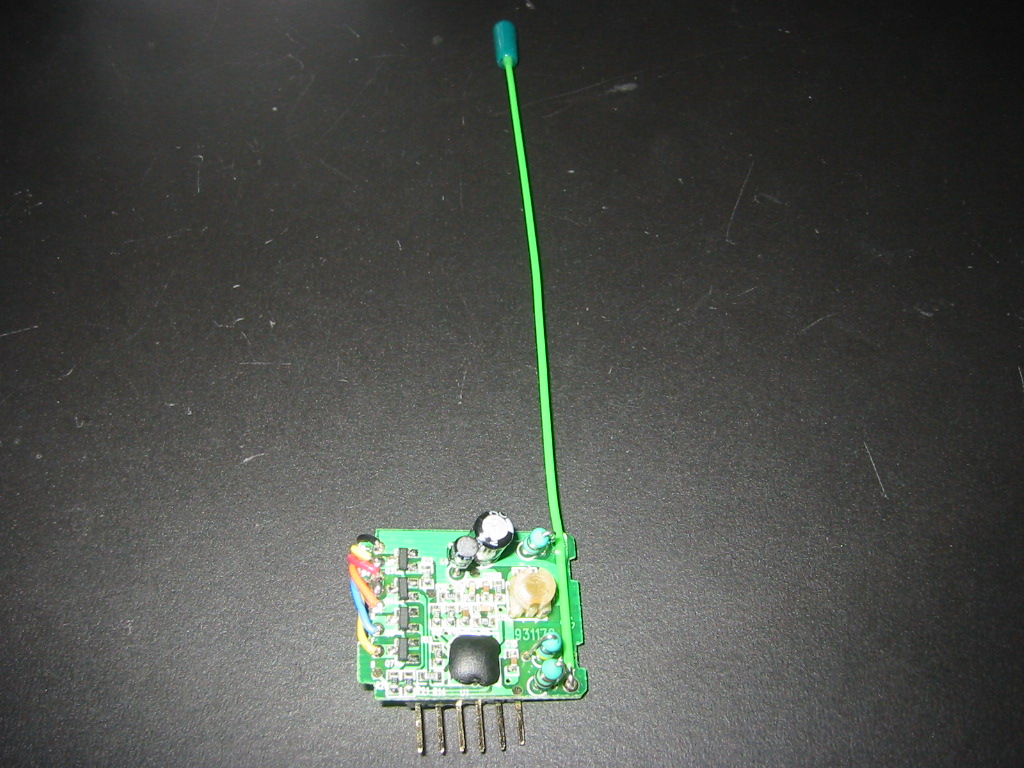
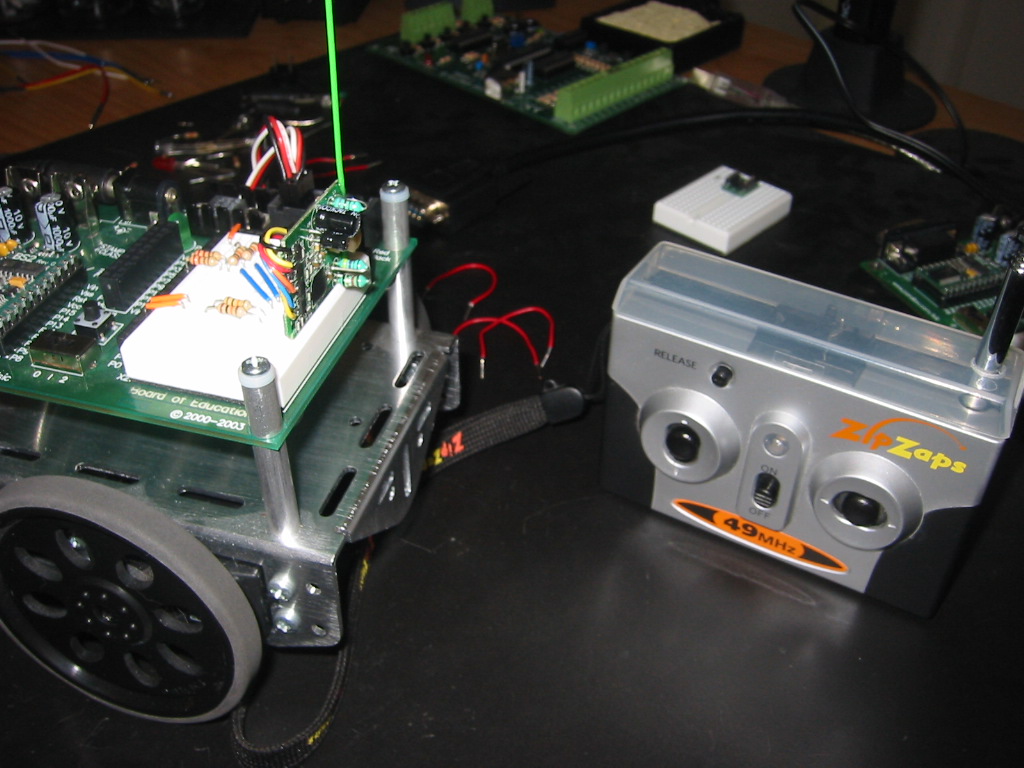
This is a pretty inexpensive way to add a remote control to your Boe-Bot. I took a Radio Shack ZipZaps remote controlled car and removed all of the car parts down to just the board. Then I wired the six important points to a six pin header which I epoxied to the back of the board. I also removed the flimsy wire antenna and replaced it with a solid breadboard wire which is re-enfored with a small amount of epoxy. This then can just plug right into the Boe-Bot board as a sort-of app mod. Now I can have my Boe-Bot chase the cats around the house with my ZipZaps remote control.
1024 x 768 - 200K
1024 x 768 - 258K
1024 x 768 - 249K
1024 x 768 - 248K
1024 x 768 - 200K
Comments
I originally became involved with Parallax due to a college project I am involved in ( making CanSatellites) - but the more projects I see, the more I am getting sucked into robotics, lol.
Now if I can just firgure out how to get a BOE-Bot outta our college funds instead of my fairly empty pocket!! haha
Alohas
-Marc
What I was able to figure out with my ZipZaps is this: The forward and back pins are both +V when neither of the buttons on the remote are being pressed. When you press either the forward or backward button on the remote, it's corresponding pin goes to ground. The left and right pins are not connected when neither button is pressed. When pressed the corresponding pin goes to ground.
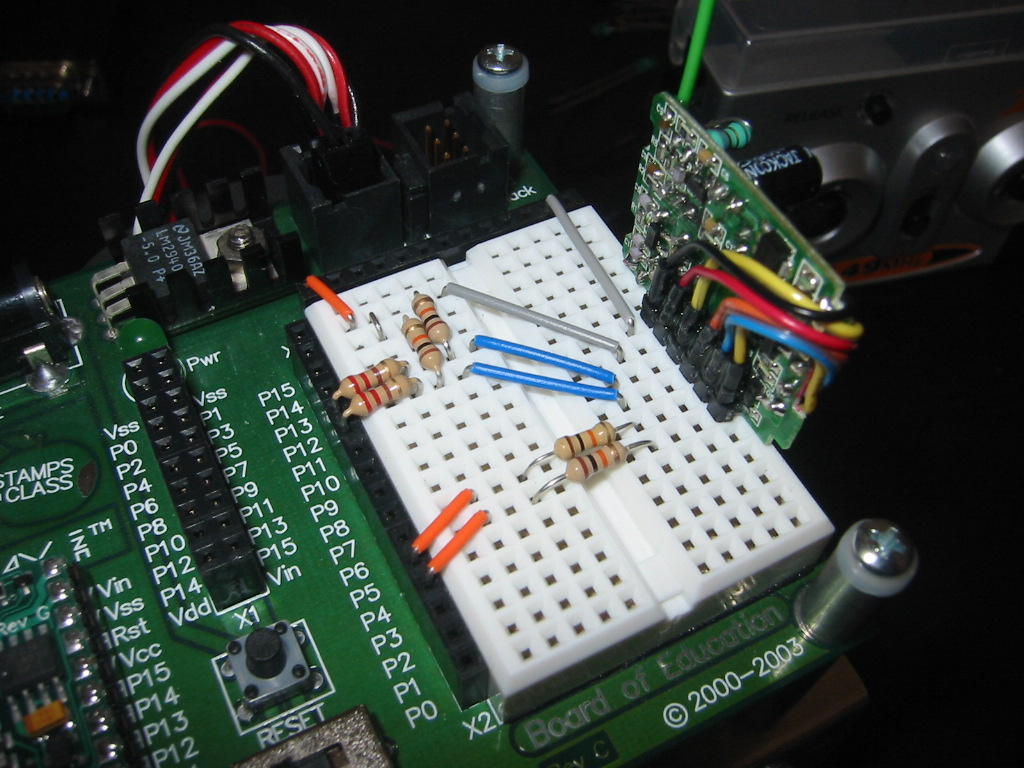
To detect the state of any of the buttons with the BS2 I just check for when the pin goes low. For the left and right controls this requires a couple of pull up resistors to keep the pins high when off like the forward and backward pins are normally.
I don't have the proper instruments to figure out the steering. There's what looks like a pager motor that drives a tiny gearbox, which moves the wheels left or right. There's also a small potentiometer that looks like it is connected to the gearbox, and used for feedback on the position of the wheels (I'd have to destroy the car to see if it is connected for sure). I tried measuring with a VOM, but the voltage changes only briefly. My guess is that it pulses the steering motor until the pot indicates that the desired position is reached.
There are also headlights and tail lights (2 x 2 LEDs). The headlights are lit when the car is going forward. The taillights are lit when the car is going backwards. There are 4 wires going to the lights: VCC, Ground, Headlights, Tail lights. VCC to Ground is about 3V (the NiMH battery is labeled 2.4V). The HL and TL wires are high, and are brought low to activate the respective lights. There's actually a small (0.25in x 0.5in ?) circuit board under the roof of the car's body that has 4 smd components on it. I didn't check if Ground for the lights is the same as the battery negative terminal.
If anyone buys one, and you want to take the controller apart, you need to be aware of the following:
1. The 4 screws in the back hold it together. Take the batteries out before you remove the screws.
2. Before you can take the unit apart you have to remove the steering knob. It doesn't pry off. It's held on with a screw. There's a plastic dome over the screw, which is in the center of the knob. I pried the dome off with a pair of diagonal cutters. It might be possible to do it less destructively with a small screwdriver.
3. The case might have to be gently pried out to clear the steering centering pot on the left side of the remote.
4. The case might have to be pried up to clear the L/R switch on the top of the remote.
5. The L/R switch has a small black piece of paper that fits over it. This might fall off when you open the case.
6. The channel switch has a plastic cover. This will fall off when you open the case.
7. There's a small spring that goes under the "release" button (there's a well in the back of the case to hold it). Guess what! This will also fall out.
When taking the car apart, I found that if there's a screw, it has to be removed. Be careful around the front end of the car. There's a plate (with two small screws) that holds the front wheel assemblies in place. When you remove it two very! tiny springs may come off. Use caution.
Hope this helps someone.
Mike
Post Edited (MikeK) : 11/10/2005 12:27:11 AM GMT
I guess its possible for digital proportional input through the forward/reverse controls by reading the voltage at the motor connectors. The steering system sounds to me much like how a servo works-motor is turned on/off/reverse based on potentiometer feedback. Any indications that the steering unit takes PWM?
I may get one of these to play around with myself-I'll keep in mind those tips on opening it up.
It was worth the $13 (to me) when I opened the car and saw what they crammed in there. Plus, they're fun to play with.
Sorry I couldn't be of more help.
Mike
Again, this is from the first generation ZipZaps so your results may vary with the newer ones. But here goes...
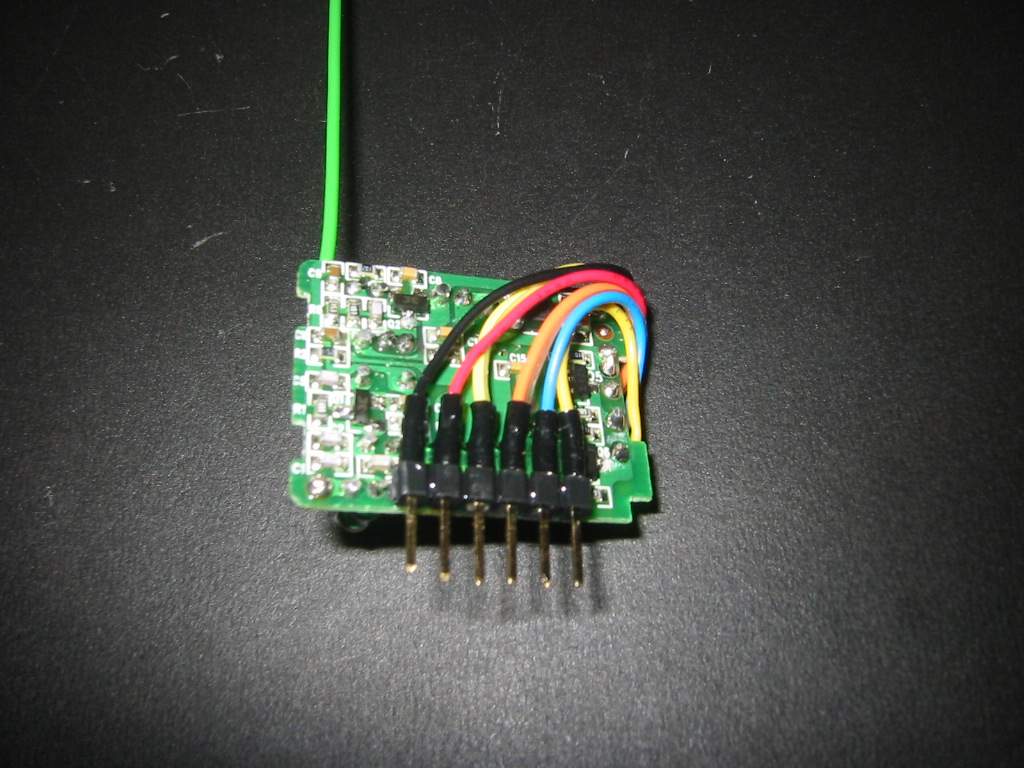
These pics are about as close up as I can get with my camera. If you look at the Close-up Front pic and starting from left to right lable the pins A-F here is what they connect to:
A = Ground
B = +5V
C = Left
D = Right
E = Backward
F = Forward
Looking at the Close-up Back pic, the wires for A (Gnd) and B (+5V) are soldered to two connections which are labeled on my board as B- and B+. The others are soldered to the transistors which on mine are Q3, Q4, Q7 and Q8. So the pins are C=Q3, D=Q4, E=Q8, F=Q7.
Hope this helps.
-Marc
Post Edited (HavoKane) : 11/27/2005 12:31:58 AM GMT
Post Edited (neoteric) : 2/25/2006 1:48:11 PM GMT
-Marc
Got my BOE bot last week, and finally had a chance to play this evening (well last evening now, heh) [noparse]:D[/noparse]
Had picked up a ZipZap awhile back, in anticipation of trying this project out. Mine was a four wheel drive truck, and looked a little different than the original posted here. However, "F" ,"B","L","R",VSS and VDD were printed on one side of the pcb, so all looked good. I was kinda apprehensive about trying this at first, as my zipzap truck wasn't exactly working right to begin with - some times it worked, soemtimes it didnt. Found out why when I gutted it tho - the VDD wire practically fell out in my hand, lousy solder joint!.
Anyways, I rewired and resoldered everything and to my extreme surprised, it actually worked! [noparse]:D[/noparse] Even have the little "board" with reverse lights and headlights working [noparse]:)[/noparse]
Just one question tho- how do I make it STOP!! lol!
Seems that it keeps on going, and going and gooooing until it gets turned off ( at the BOE Board) . Is this normal, or should it only move when I hit one of the sticks (like it does for the ZipZap vehicle) ? Although I am no where near the level of coder you are , Marc , it seems that in your code the values get zeroed out and it should stop until a button is pressed again right? or not?
Either way, great project and an exceptional and easy way to add wireless control to the BoeBot. Thank you for sharing, its been a great learning experience - and I think will continue to be! I msut say, I am quite happy with my initial entry to robotics [noparse]:)[/noparse]
Robert
-Marc
When I reset the stamp, all commands are cleared, but if I then push the stick for forward, it will go forward until I push the stick somewhere else.
I am happy it works at all, and am sure as I learn more it will all work out. However, any input is appreciated!
Thanks,
Robert
-Marc
Besides the SE is only 12.00 or so, at that price a little experimentation is easily affordable - even if it doesnt work. I will probably fool with this more in the months to come, but first I have to finish my primary project [noparse]:D[/noparse]