

Reciprocal Counter Demo
 cgracey
Posts: 14,300
cgracey
Posts: 14,300
There have been some questions about the reciprocal counter modes. A few of you have also been asking about how to do simple I/O, like serial with decimal number printing, so that you can see what's going on inside. It's all in here. This reciprocal counter is Jmg's baby, by the way. He really wanted this in the chip and it's pretty neat how it works.
This demo shows the reciprocal counter modes working together to form a pretty competent frequency counter. It outputs serial text at 1Mbaud and works really well with the Parallax Serial Terminal:
It's set up for 250MHz and the minimum sample time (msr_us) can be set from 1us to 5 seconds. It also demonstrates some practical math and number printing.
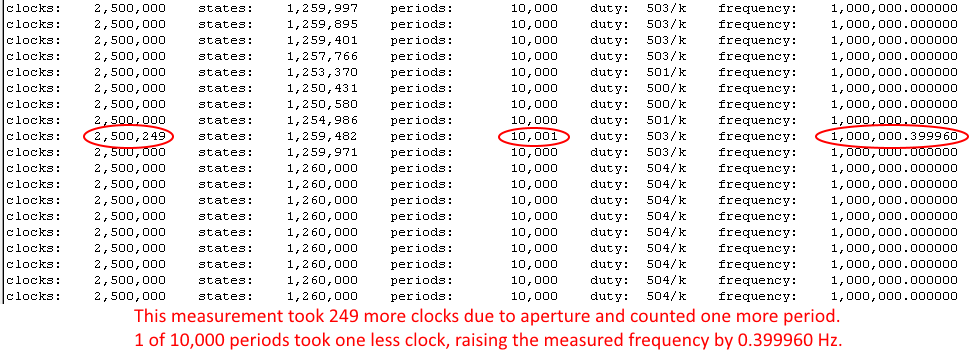
Here is a screenshot of some serial output, while the minimum sample time is 10ms and it's receiving a 1MHz square wave into P0:
This demo shows the reciprocal counter modes working together to form a pretty competent frequency counter. It outputs serial text at 1Mbaud and works really well with the Parallax Serial Terminal:
'**************************************** '* Reciprocal Counter Demonstration * '* - inputs frequency on P0 * '* - transmits serial text on P62 * '**************************************** ' con sysfreq = 250_000_000.0 'system frequency msr_us = 10_000.0 'minimum measurement time in microseconds (float) msr_pin = 0 'pin to measure frequency on, uses next two pins baud = 1_000_000.0 'serial baud rate on P62 (float) msr_min = sysfreq/1e6*msr_us 'minimum measurement time in system clocks msr_pins = 2<<6 + msr_pin 'group of three pins starting at msr_pin dat org ' ' ' Setup ' hubset ##%1_000001_0000011000_1111_10_00 'enable 20MHz crystal and PLL waitx ##20_000_000/100 'wait 10ms for crystal and PLL to stabilize hubset ##%1_000001_0000011000_1111_10_11 'switch to PLL wrpin msr_time,#msr_pin+0 'configure smart pin for clocks count wrpin msr_states,#msr_pin+1 'configure smart pin for states count wrpin msr_periods,#msr_pin+2 'configure smart pin for periods count wxpin ##round(msr_min),#msr_pins 'set smart pins' x-value to clocks in msr_us wypin #%00,#msr_pins 'set smart pins' y-value to rise-to-rise dirh #msr_pins 'concurrently enable smart pins wrpin #%01_11110_0,#62 'configure async serial output wxpin tx_mode,#62 dirh #62 ' ' ' Take measurements ' .loop akpin #msr_pins 'clear any old measurement waitx #3 .wait testp #msr_pin wc 'wait for new measurement if_nc jmp #.wait rqpin clocks,#msr_pin+0 'get clocks rqpin states,#msr_pin+1 'get states rqpin periods,#msr_pin+2 'get periods ' ' ' Compute duty and frequency ' qmul states,##1_000 'duty = states * 1_000 / clocks getqx x getqy y setq y qdiv x,clocks getqx duty qmul periods,##round(sysfreq) 'frequency = periods * sysfreq / clocks getqx x getqy y setq y qdiv x,clocks getqx frequency getqy y 'frequency_sub = remainder / clocks * 1_000_000 qfrac y,clocks getqx x qmul x,##1_000_000 getqy frequency_sub ' ' ' Send results serially on P62 ' call #tx_string 'clocks byte 13," clocks:",0 callpa clocks,#tx_decimal call #tx_string 'states byte " states:",0 callpa states,#tx_decimal call #tx_string 'periods byte " periods:",0 callpa periods,#tx_decimal call #tx_string 'duty byte " duty:",0 mov decx,dec4 callpa duty,#tx_decimal mov decx,dec10 call #tx_string 'frequency byte "/k frequency:",0 callpa frequency,#tx_decimal callpa #".",#tx_chr callpa frequency_sub,#tx_decimal_sub jmp #.loop ' ' ' Transmit zero-terminated string following call ' tx_string pop x 'pop return address and make byte ptr shl x,#2 .loop altgb x 'get character getbyte y tjz y,#.done 'if 0, done callpa y,#tx_chr 'else, output character ijnz x,#.loop 'inc byte ptr and loop .done shr x,#2 'make long ptr add x,#1 'inc long ptr to instruction following string jmp x 'return to caller ' ' ' Transmit decimal value via callpa ' tx_decimal mov x,pa 'decimal value mov v,#2 'init comma tracker mov w,#0 'init leading-zero flag mov z,decx 'init tens place .digit qdiv x,z 'divide x by tens place getqx y cmpr z,#1 wc 'output digit if last or not leading-zero or w,y wz if_nc_or_nz callpa y,#tx_digit if_c_and_z callpa #" ",#tx_chr 'else, output leading space if_c incmod v,#2 wc 'output commas or leading spaces as needed if_c_and_nz callpa #",",#tx_chr if_c_and_z callpa #" ",#tx_chr qmul y,z 'subtract tens place digit getqx y sub x,y qdiv z,#10 'divide tens place by 10 getqx z _ret_ tjnz z,#.digit 'if not zero, another digit decx long 1_000_000_000 dec10 long 1_000_000_000 dec4 long 1_000 ' ' ' Transmit decimal sub value via callpa ' tx_decimal_sub mov x,pa 'decimal value mov z,dec6 'init tens place .digit qdiv x,z 'divide x by tens place getqx y callpa y,#tx_digit 'output digit qmul y,z 'subtract tens place digit getqx y sub x,y qdiv z,#10 'divide tens place by 10 getqx z _ret_ tjnz z,#.digit 'if not zero, another digit dec6 long 100_000 ' ' ' Transmit digit/character via callpa ' tx_digit or pa,#"0" 'turn 0..9 into "0".."9" tx_chr rdpin pb,#62 wc 'wait for pin not busy if_c jmp #tx_chr wypin pa,#62 'transmit character ret wcz 'return and preserve caller's flags ' ' ' Data ' tx_mode long (round(sysfreq / baud * 65536.0) & $FFFFFC00) + 7 '8N1 msr_time long %0000_0000_000_0000_000000000_00_10101_0 'msr_pin+0 config msr_states long %0111_0111_000_0000_000000000_00_10110_0 'msr_pin+1 config msr_periods long %0110_0110_000_0000_000000000_00_10111_0 'msr_pin+2 config clocks res 1 states res 1 periods res 1 duty res 1 frequency res 1 frequency_sub res 1 v res 1 w res 1 x res 1 y res 1 z res 1
It's set up for 250MHz and the minimum sample time (msr_us) can be set from 1us to 5 seconds. It also demonstrates some practical math and number printing.
Here is a screenshot of some serial output, while the minimum sample time is 10ms and it's receiving a 1MHz square wave into P0:
969 x 350 - 29K
Comments
Thank so much for this demo. This is exactly what I want to use the P2 for.
I got everything working except how to compute the frequency.
Bean
You bet. Note that the duty and frequency computations first multiply to produce 64-bit products, then divide those 64-bit products by 32-bit values. This allows full 32-bit inputs to be handled without any interim overflows.
Those smartpins are amazing. 64 independent sub systems.
Sometimes I cringe reading your code, today I had to smile.
Your string output routine is absolutely stupid funny, one could say even silly.
But it keeps the string right where one would like to have it when reading the code. I like it.
How do you feel about eating your own bread now?
I think P2 PASM is still a bit overwhelming for me but a logical extension to PASM. I do have a lot of fun with the P2, not much to share, I am fighting a lot with small stuff, but you obviously have a big grin in your face playing with the newborn.
But you need to get your Spin2 Interpreter finished to keep up with Eric's pace, FlexSpin SPIN 1.5 is cool, but without you finishing, Eric can just guess where to go.
I think it is very important that your interpreter will be able to integrate the same binaries/objects Flexgui/Fastspin uses.
This time we can build a system where different programs can co-exist, @RossH and @ersmith seem to align the C part, @"Peter Jakacki" is adapting also where needed, and PropGcc - hmm - I am not sure where this stands.
But we need your byte code interpreter to build a self hosted Spin IDE on the P2.
Enjoy
Mike
"Periods" grr, "States" is terrible naming. Density is it, as in pulse density modulation.
The bread is complicated. I get lost in it. Because there are lots of different instructions, many of which can achieve two things at once, the potential to optimize never seems to end. I can think I have something as tight as possible, but I'll come back a month later and find a way to squeeze it a lot more, especially in merging related code sequences. So, it can be a recipe for madness, along with being a fun challenge.
Yes, Spin2 needs to get done. I'm really feeling positive about it. The problem is that there's a lot to chew, at once. I think it's been more tedious to modify the old code base than it might have been to do it from scratch, because starting from scratch would have allowed incremental development. Now, it's been more parallel and it will go from doing nothing to working, all at once. Maybe it's just that I think about it in parallel because I know what all it needs to do, and I don't get the motivation that comes with seeing it grow from nothing. It's going to be really nice, anyway. I am looking forward to having it working so that I can use it build lots of objects.
It's not even "periods". I believe you are referring to "states" from which duty (or density) is computed. "States" could be called "highs", since it tracks how many 1's were reading during the measurement.
Density is an average. We need a word that is a plural, to express what is being counted.
clocks
highs
periods
-or-
time
density
quantity
Count could also be called pulses. Periods does work although it feels more like the name to a reference/preset rather than the measurement.
EDIT: I've also called density "accumulate" or "accum", or just "acc".
Bean
Kind regards, Samuel Lourenço
I will do it exactly the opposite way .... but perhaps because to much times I think in italian and translate to english.
Yes, Chip's docs do need some work... they can be opaque
Everything uses counters, so I tend to use ticks or SysCLKs (or even just Time) for the faster counter, usually capturing time, and I use 'whole cycles' for the user measurement value.
The 'whole' is always there, because that extra Pin Cell hardware is an important key element of the Reciprocal Counter.
some comments on the code... clarifies needed :
The comments are imprecise and do not match the code. One says 2 pins, then another says 3 pins.
It uses 3 Smart Pin cells, not pins. ie The P1 and P2 pins here do not need to be connected to anything, but their Smart Pin Cells are used,
General comment: I also like to paste example output capture of code, into the source as comments, so users instantly know what they should see.
Other items:
Why does DUTY change so much here ? What is the test source ?
Suggestions:
Your example runs at a fast 100Hz sample, and resolves to 0.4ppm, even at that fast pace, but the HW does not miss any information, so you can update an every 1 second total, and that 1 second average will resolve to 4ppb.
If you connect a 1pps signal from a GPS to this, it should auto-adjust to 1s samples ?
Of course, reciprocal counters auto-scale, so you can simply feed in any MHz, within the scope of P2 counting.
You get out a result of so many 'digits per second' precision - here, that's ~6.4 digits/10ms
With a Sysclk of 250MHz, and no pin-filter enabled, that max Fin will be just under 125MHz (depends on duty cycle)
I think the line is the pivotal HW-SW interface, and that will simply wait for at least a whole cycle on Fin, so frequencies below 100Hz (10ms nominal measure time), will merely update the display slower, and Chips 'periods' value will always be 1, but the capture time ('clocks') will vary, and be 250M at 1Hz
I had some trouble getting my head around how the fractional part of the frequency was computed. But now I understand it.
Bean
P.S. Could someone explain the use of a dot before some of the labels ? ".wait", ".loop", ".done"
ticks
highs
cycles (need a better, but short word here)
Jmg, msr_pin is the actual input pin, while the other two pins also watch it from nearby. The 2<<6 adds two extra pins for a total of three.
Kind regards, Samuel Lourenço
It's to indicate a temporary label that only lasts until the next regular label. In P1 PASM that was indicated with a colon (":wait", ":loop", ":done" etc.) but in P2 PASM it's a dot.
I kind of wish that I had left it at ":", instead of ".", because something starting with "." looks incomplete. The impetus was to make it so that local labels could later be addressed outside of their context by "regularlabel.locallabel". I'll get there, eventually.
@ersmith , Does fastspin allow the @.endloop type of addressing with REP? I vaguely recall I had trouble with this when porting over to use fastspin instead from P2ASM and I think I needed to change my labels to get rid of the period for my rep loop addressing to work.
eg. try this...
REP @.endloop, #4 ADD A, #1 ' some loop .endloop. as local prefix is used in other assemblers, and also common is this example, which could allow you to support anything.
I've also seem ? used as a local prefix.
ie you can still use P1,P2 as general IO, and I guess could even attach them to P3's Pin cell if you needed to.
That's true, though you would have to use their smart pin modes to control their output enable states.
What is your test clock source there ?
That also seems to have unexpected larger changes in DUTY or %Hi measurements.
it varies about 904 ppm
Maybe that's due to the high MHz in, and the low number of cycles per HI gate.
1254196/100002 = 12.54170 cycles, not many, so the edge uncertainty/noise is going to be a contributor here.
and 900ppm variation band on 100ns, maps to ~90ps.
This may be showing the jitter on the P2 sysclock ?
Seems to work for me.