

S2 Unable To Execute List of Commands Accurately (Perhaps user error)
 Hewittmd97
Posts: 15
Hewittmd97
Posts: 15
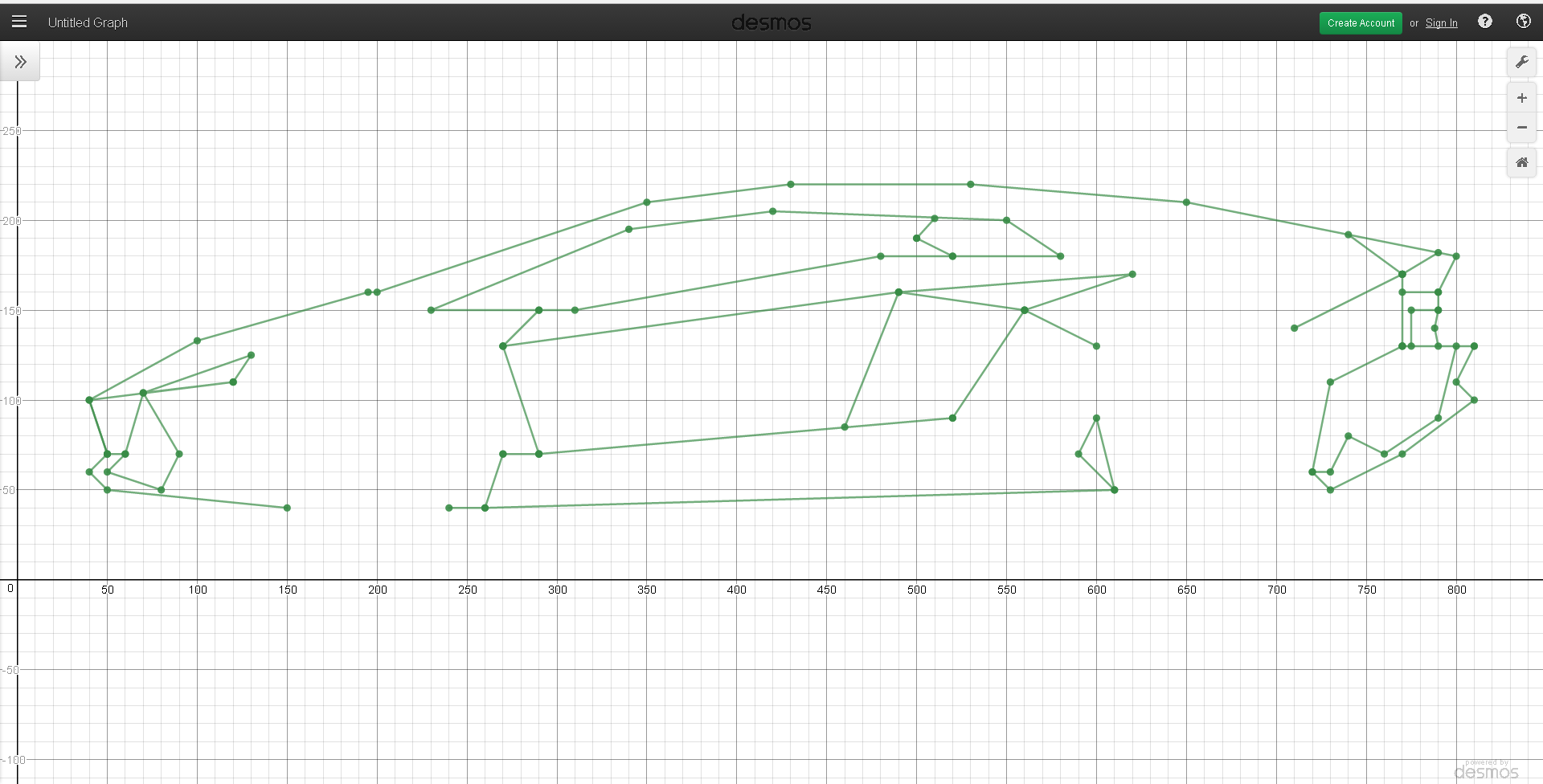
I'm having my S2 draw the outline of a car and it does fine up until about 3/4 of the way through the function. Then an angle is deviated from and everything else just snowballs.
I have tried multiple times to tinker with my code and it still doesn't work. I think that either there is an angle within the outline too small for the S2 to navigate or the length of the memory pertaining to where the S2 thinks it is located on the graph is short or not up to what it should be although that does not seem to be the case.
Computer specs:
Windows 10 Pro
Propellor stand alone suite
32gbs of RAM
i5-4690k processor
(sorry if this info is irrelevant. I'm more accustomed to computer related forums.)
S2 specs:
stock specs with fresh batteries.
I have tried multiple times to tinker with my code and it still doesn't work. I think that either there is an angle within the outline too small for the S2 to navigate or the length of the memory pertaining to where the S2 thinks it is located on the graph is short or not up to what it should be although that does not seem to be the case.
Computer specs:
Windows 10 Pro
Propellor stand alone suite
32gbs of RAM
i5-4690k processor
(sorry if this info is irrelevant. I'm more accustomed to computer related forums.)
S2 specs:
stock specs with fresh batteries.
1920 x 976 - 88K

1920 x 975 - 170K
1920 x 972 - 169K

1920 x 969 - 169K
{kind=link}
295 x 904 - 24K
{kind=link}
244 x 812 - 22K

3887 x 726 - 509K
Comments
I agree. Could you archive the file to a zip to post it so others can try.
File>Archive>Project.
I spoke to my professor and she said that the drawing from the image shown in the original post would be acceptable because one can obviously tell that it is supposed to be a car. It isn't good enough for me though. I have already invested too much time and effort into this to just settle for the lack-luster results. I want to wow the people. The assignment is to make the S2 draw something with creativity. While we were assigned to groups, I did this entirely on my own. (I know. Shame on me. I need to learn to work as a team.) Other groups are planning on doing a basic Transformers emblem design. In my opinion (which I realize is biased. Haha) the outline of a car would be way more astounding. I have talked to my team members and only 1 of them really cares about the assignment. He was talking about changing the angle of the robot further on down in the code so that it is correct after that. I thought about that, but that would only work if I told the robot to move forward for a set amount of time and told it exactly what angle to turn at. Simply programming in a slight variation of the robots current orientation wouldn't work either, because then the robot would just continue onto where it believes the next coordinate is. Unless I were to program in an 'end_path' , alter the degrees, and then begin another 'begin_path' at some point. My team member also mentioned shifting the points down for the detailing to the door and the front tire and front bumper. I believe that would be a lot of trial and error though. Let me know what you think about the different approaches or if you have some other alternative that will be simpler.
P.S. Our drawings will be graded by outside sources and the group with the best drawing is awarded extra points or something along those lines.
P.P.S. Once the robot begins drawing, no one is allowed to touch or adjust the robot, except to remove the pen so that it may move to a new location and at that point the pen would be reinserted.
Also, I am not familiar with what method I should be calling on to make the S2 pause so that the pen may be taken out or inserted.
You could remove part of your diagram or remove unused methods of the S2 object. I think there are Spin compilers which will remove unused methods. This should save some RAM. You could also try removing unused methods manually.
You can check to see how much free space you have by pressing F8. Try to get the free space over 200 longs (though it might work with about 100 free longs).
Are you sure about the memory. I'm showing over 5,000 long available.
You're right!
I blame the anesthesia from having an tooth extraction and implant placed yesterday.
Thanks for catching that.
Tooth pain has to be the worst pain in the world. I have had mine over the years.
I don't have enough rechargeable batteries or a big enough piece of paper to replicate at this time.
Working on it in the next day or two.
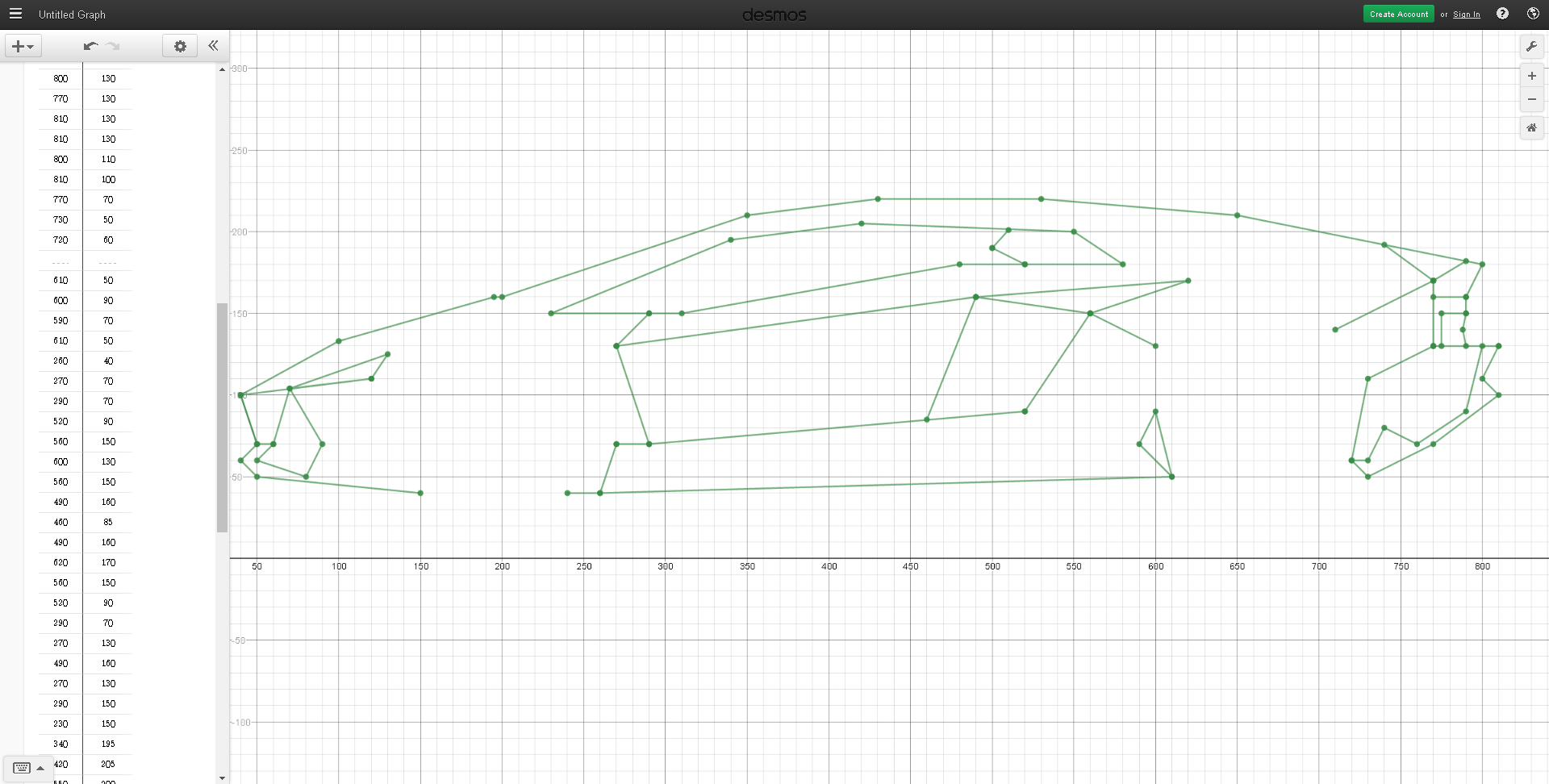
The program seems to run through to the end.
The two runs may differ because I have 2" tape on the 11" x 17" papers. That may have cause slippage.
It looks pretty close to your originals.
Where you you running the tests on a tile floor? (Looks like it). That would produce some slippage.
Sharpies on tile floors? Not a good thing. Acetone should clean it up.
I have used Sharpies where I should not have. Messy cleanup.
Nicely done Publison!
I think that's close to what one can expect with a S2. It's not really a precision plotting printer.
It might be possible to improve the output if one used a single sheet of paper on a very flat smooth surface.
I'd suggest simplifying the design a bit. Each turn is going to result in a small error and lots of turns will cause these small errors to add up to a large error.
It's pretty clear you're new to robotics.
I used Lego robotics stuff before purchasing anything from Parallax (I have a huge Lego collection). I think you're inexperience and frustrations are causing you to make claims which are not true. You could possibly make a Lego plotting device which used rails and rack and pinion tracks to produce a drawing 10 times better but you'd be hard pressed to get a Lego car capable of matching the S2's output.
There are well known limits to odometry type robotic navigation. As I mentioned previously, there's a small error with each turn (and even while driving straight) associated with wheels slipping on the ground the finite resolution of the encoders. Odometry alone is not used for very precise navigation in robots. You need some sort of outside reference to correct for the accumulated errors associated with odometry. The precision you're seeing with the S2 is pretty close to as good at it gets with only odometry feedback.
It's easy to say you could make a Lego robot capable of doing a ten times better job, it's a much different thing to actually build such a robot. Based on my experience with Lego robots, I think you'd have a very hard time making a wheeled Lego robot capable of matching the S2's performance.
Did you pay $180 for your S2? The S3 sells for that price but it has a cool rechargeable battery system. I recall the S2 selling for significantly less than $180. I purchased mine on a Black Friday sale for $90.
Congratulations on getting as far as you have.
Here's a great video on robotics by David Anderson.
One of his robots is made from Lego bricks but I doubt even his robot would out perform the S2 in the task of drawing a car using odometry input alone.
Parallax has thousands of Scribblers out in the wild, mostly in educational environments. Most people do not see them as inferior to other bots.
As far as feedback, there is always the tech support email and phone number when you are in a crunch.