

Controlling My Robot
 Paul K.
Posts: 150
Paul K.
Posts: 150
I started this some time ago and its a Propeller controller for robots.
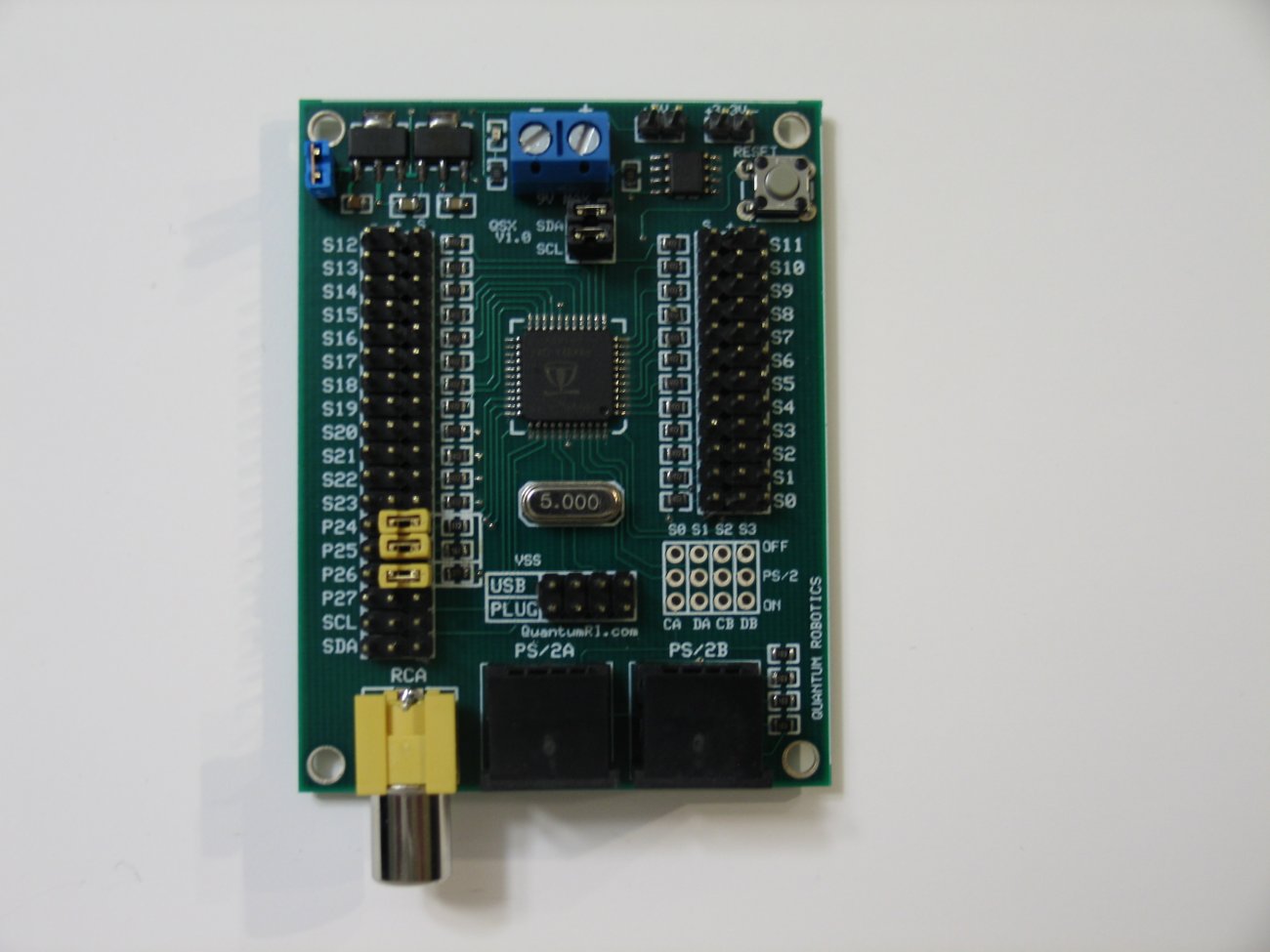
The controller has many more uses as I wanted something that could do anything I could think of.· So I came up with this board.· It allows me to controller 24 servos more if I need.· It has 64Kb eeprom using a AT24C512 chip.· I can enable or disable a RCA and PS/2 inputs.·It has a removable crystal and acces to SCL and SDA.· I can even disable the eeprom on board and daughter board what I need in the future.
I have some pics below and videos of it in action.· Nothing spectacular but it suits my needs and beyond.
http://www.youtube.com/user/QuantumRoboticsInc#play/all/uploads-all/1/vD_LLrSpYKg
http://www.youtube.com/user/QuantumRoboticsInc#play/all/uploads-all/0/wK5A97Wyqtc
The software is a Foward Kinematics engine·controlling the end position of each leg.··It works but a lot of work figuring out walking gaits.· I am currently working on a Inverse Kinematics version.· Its close but need a little more work.· I·included my code.· Its rough but never been that great at writing code.
Let me know what you think.· I didnt post in the completed projects since I have some more to finsih up.
I do have a couple extra boards if there is any one interested $54.00 a piece.· I had a small order of boards made and have·10 soldered up and tested.
Thanks Paul·
Post Edited (Paul K.) : 9/18/2009 6:53:55 AM GMT
The controller has many more uses as I wanted something that could do anything I could think of.· So I came up with this board.· It allows me to controller 24 servos more if I need.· It has 64Kb eeprom using a AT24C512 chip.· I can enable or disable a RCA and PS/2 inputs.·It has a removable crystal and acces to SCL and SDA.· I can even disable the eeprom on board and daughter board what I need in the future.
I have some pics below and videos of it in action.· Nothing spectacular but it suits my needs and beyond.
http://www.youtube.com/user/QuantumRoboticsInc#play/all/uploads-all/1/vD_LLrSpYKg
http://www.youtube.com/user/QuantumRoboticsInc#play/all/uploads-all/0/wK5A97Wyqtc
The software is a Foward Kinematics engine·controlling the end position of each leg.··It works but a lot of work figuring out walking gaits.· I am currently working on a Inverse Kinematics version.· Its close but need a little more work.· I·included my code.· Its rough but never been that great at writing code.
Let me know what you think.· I didnt post in the completed projects since I have some more to finsih up.
I do have a couple extra boards if there is any one interested $54.00 a piece.· I had a small order of boards made and have·10 soldered up and tested.
Thanks Paul·
Post Edited (Paul K.) : 9/18/2009 6:53:55 AM GMT
1300 x 975 - 105K
doc
1M
Comments