

New Chameleon product complete and need some coders to explore possibilities
 AndreL
Posts: 1,004
AndreL
Posts: 1,004
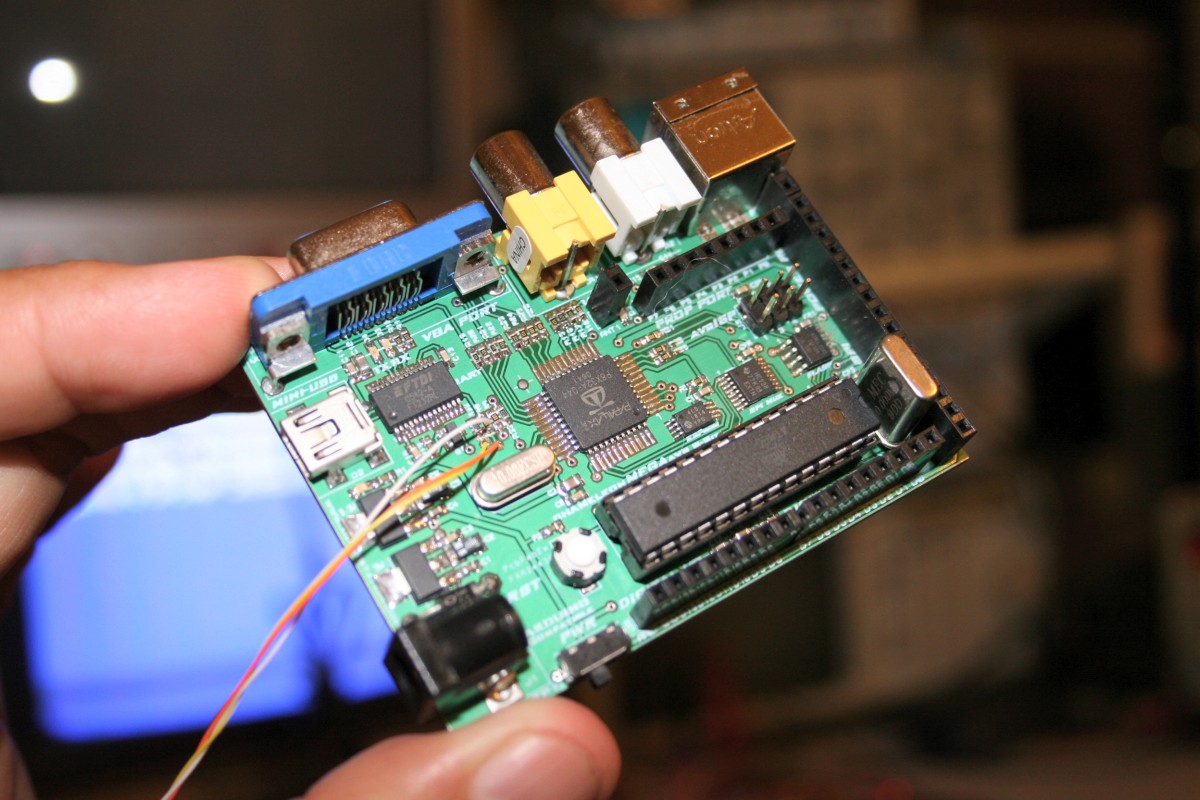
We have been working on two new Arduino like products called the Chameleons. We are going to put them for pre-sale in a couple weeks and have them back from manufacturing in 5-6 weeks. In the meantime, we wanted to give the opportunity for a few really hard core Propeller programmers to get their hands on the systems and develop some open source stuff for them for launch.
The systems are based on a dual processor design where the primary processor is an AVR or PIC processor running C/C++ for the most part. The AVR/PIC sends commands to the Prop over a high speed SPI bus and a virtual SPI interface receives the commands and then issues them to various drivers running on the Prop on its cores. Thus, for people familiar with Arduino programming, you add a couple lines of code and you can draw text, or make sound, or read the keyboard, etc. since the Prop does all the heavy lifting and from the AVR/PIC acts like a media server.
I have designed drivers, example code, and its all working perfectly, so I thought I would give out a taste to some very special few that are interested. That said, if you want get a demo unit and code on it, all work will be open source and you will upload to our Wiki at some point is the idea.
For coders to be considered you should be a master Propeller programmer, or at least dangerous [noparse]:)[/noparse] And have worked with either the AVR or PIC processors and have a good understanding of them since you will be coding in C/C++ on the AVR/PIC side to control the Prop and write applications. Thus, your demos might be totally AVR/PIC side, OR you might decide to develop crazy drivers on the Prop side for the AVR/PIC to serve to.
In any case, the idea of the product was to be a massively powerful Arduino like product, but use the Propeller as the secret sauce and let it do what it does best which is media control and heavy lifting while using a C/C++ powered client CPU (AVR/PIC) to do the application control. All the while trying to keep the board Arduino like in design (I/O for example) so that users could jump ship from Arduino land to Chameleon country, and all the while use a product that leverages the Propeller.
If you're interested, PM me here, ask questions publicly, or email me at ceo@nurve.net. I will pick 2-3 AVR guys and 2-3 PIC guys, but everyone has to be a Prop guy [noparse]:)[/noparse] Applicants should be easy to contact, and have a lot of time to actually do something, the prototype kits are $500 each and not cheap, so this isn't for newbies or people that want to play around, its for people that really think they can deliver some cool stuff, and "get" the design from my description and see the potential of this.
Attached is a pic of an early prototype, the final versions have a break away prototyping area to right and the little debug switch is of course not there [noparse]:)[/noparse]
Thanks,
Andre' LaMothe
Nurve Networks LLC
The systems are based on a dual processor design where the primary processor is an AVR or PIC processor running C/C++ for the most part. The AVR/PIC sends commands to the Prop over a high speed SPI bus and a virtual SPI interface receives the commands and then issues them to various drivers running on the Prop on its cores. Thus, for people familiar with Arduino programming, you add a couple lines of code and you can draw text, or make sound, or read the keyboard, etc. since the Prop does all the heavy lifting and from the AVR/PIC acts like a media server.
I have designed drivers, example code, and its all working perfectly, so I thought I would give out a taste to some very special few that are interested. That said, if you want get a demo unit and code on it, all work will be open source and you will upload to our Wiki at some point is the idea.
For coders to be considered you should be a master Propeller programmer, or at least dangerous [noparse]:)[/noparse] And have worked with either the AVR or PIC processors and have a good understanding of them since you will be coding in C/C++ on the AVR/PIC side to control the Prop and write applications. Thus, your demos might be totally AVR/PIC side, OR you might decide to develop crazy drivers on the Prop side for the AVR/PIC to serve to.
In any case, the idea of the product was to be a massively powerful Arduino like product, but use the Propeller as the secret sauce and let it do what it does best which is media control and heavy lifting while using a C/C++ powered client CPU (AVR/PIC) to do the application control. All the while trying to keep the board Arduino like in design (I/O for example) so that users could jump ship from Arduino land to Chameleon country, and all the while use a product that leverages the Propeller.
If you're interested, PM me here, ask questions publicly, or email me at ceo@nurve.net. I will pick 2-3 AVR guys and 2-3 PIC guys, but everyone has to be a Prop guy [noparse]:)[/noparse] Applicants should be easy to contact, and have a lot of time to actually do something, the prototype kits are $500 each and not cheap, so this isn't for newbies or people that want to play around, its for people that really think they can deliver some cool stuff, and "get" the design from my description and see the potential of this.
Attached is a pic of an early prototype, the final versions have a break away prototyping area to right and the little debug switch is of course not there [noparse]:)[/noparse]
Thanks,
Andre' LaMothe
Nurve Networks LLC
1200 x 800 - 187K
Comments
Great design!· Seems·to follow the·trend of Prop + (either another Propeller, AVR, PIC, etc.).· Should get·the attention of the Arduino/Uzebox crowd, and hopefully a lot more·
Will the final product have an SD card slot (like the new XGamestation consoles), or is that a target for a "shield" product?· Seems like it is a "must have" for a lot of people.
I have used both Propellers and AVR's in designs (not together though), but I am not a "master programmer" type that you are looking for like Baggers, Bamse, PotatoHead, etc -- at least yet.· I need a few more projects "under the belt"··on the Propeller.·
·[noparse][[/noparse]Edit:] lft (Linus Åkesson) would be *the* guy to get for the·AVR+Prop design, as he has pushed both to their limits with his Craft and Turbulence demos.· You probably knew, but thought I would mention it [noparse];)[/noparse]
http://www.linusakesson.net
Post Edited (trodoss) : 7/21/2009 4:24:57 PM GMT
If it is compatable to existing Arduino shields, then there is a lot of possibilities, so probably moot to ask about other features [noparse];)[/noparse]
Having a 1MB flash on board would certianly make it "friendly" for a lot of things--probably definately beyond what you would normally use an Arduino board for. Any plans for an imbedded OS like Contiki being released with it? [noparse][[/noparse]Edit:] It is·"built for greater things" than just an Arduino-compatable board.
Post Edited (trodoss) : 7/21/2009 8:47:33 PM GMT
Andre'
From the PIC/AVR perspective, you get an Arduino-like board that has onboard video/VGA/Audio/USB/etc. with an SPI interface.
From the Propeller perspective, it is a platform for learning how to interface with another microcontroller (AVR/PIC), and/or a platform to expirament with the Arduino shields.
Certianly it will be capable of a lot more, with good community support.·
Had it existed a while ago I probably would have not learned Spin/PASM ...or at least not right away [noparse];)[/noparse]
Post Edited (trodoss) : 7/21/2009 11:32:30 PM GMT
Andre'
Are you are using the 6MHz crystal (like the Hydra) on the Propeller, and, a 16MHz crystal on the 368p (AVR version)?
Are the final boards using a DIP socket for the AVR/PIC chips, or is that just on the prototype?
Are you using a 'smaller' (ie: 32K/64K) EEPROM for the Propeller, or are you using a larger (512K?) EEPROM? With the 1 MB flash chip on the board, I could see not having as much EEPROM available.
--Thanks!
I have to say already that this looks like an AMAZING product, and I think I will be one of the first on the list to buy one once you release them! I've been tossing ideas like this around in my head for a while, but having neither the tools or the knowledge to be able to make something, this will be borderline revolutionary, I believe.
Like trodoss, I would enlist my help as well but I don't think I'm quite the material you're looking for. I have enough experience with C, but not with any micros besides the Prop.
I do have a question, though... will it have a Hydra-compatible expansion slot, so that we can use the 512K expansion card or could one be added easily enough?
Also, what about programming? Will a seperate AVR/PIC programmer have to be used?
Certianly have to agree that it looks like a great product [noparse];)[/noparse]· There would be a few of us "in line" I think.
Even when I got started working with the Propeller example code was in Spin/PASM.· Now the OBEX has C objects, and RossH is working hard on Catalina.· So, even the "Propeller side" of the Chameleon should not be near as intimidating as it once would have been.
Although the Propeller+PIC version of the Chameleon sounds like it will be powerful, I plan on working with the Propeller+AVR version, when it is available.· I have non-game project/apps that it would come in handy.
...I saw this posted on the other Chameleon thread:
Also, in the picture of the prototype there is an AVR ISP port, so it·likely supports·ISP/JTAG programmers as well.
Post Edited (trodoss) : 7/22/2009 6:07:42 PM GMT
- The propeller is always programmed via the serial port.
- The AVR/PIC can always be programmed directly thru its ISP port OR via the serial port if you have a bootloader like Arduino, or the one we mod'ed for the PIC.
But, if you hammer the AVR/PIC bootloader you need an ISP programmer ($20-30), so its a good idea to have one of those anyway for normal development with the manufacturer tool chain and or debugging.
Andre'
@AndreL,
From what I have gleamed so far, it sounds like making it 'layout compatable' with the Arduino (shields) is not part of the design and likely woudn't matter (considering the number of generic breakout boards available).· [noparse][[/noparse]Edit:] Is the 'shield' layout public yet, or is that being published when the product is available?· The prototype looks like it has about·the same number of pins as the·Arduino (different config)·and then what looks like 8 pins brought out on the Propeller side, and a port for an antenna (label "ANT1", behind the video RCA jack)?·
Exciting stuff!
Post Edited (trodoss) : 7/23/2009 7:22:03 PM GMT
I tried to match the sheild I/O as much as possible, so that at worst case you can run wires easily. But, I will sell a converter that sits on top of the Chameleon that will make it exactly compatible for a few bucks, but the IO from the arduino was right in the wrong pace and would have been in the way of my connectors, so I wanted to make the Chameleons small as the first goal.
ANT1 is just the antenna out lead for the Prop video transmitter mode.
Andre'
Andre'
Is it related to new book? Thanks.
RM.
Andre'
Any update?
Thanks
RM.
But, frankly, I am having too much fun writing this driver, I need to my pencil down and leave it alone and ship it.
The box is going to have:
1. Chameleon
2. white mini solderless board
3. DVD (with eManual / 2 page quick start
All in a DVD case or small box, still deciding.
We should probably sell them for $69, $79, probably $59, $69 will be final price -- what do you think?
Andre'
I hope my opinion helps [noparse]:)[/noparse]
regards,
Fred
Andre'
- Jesse
Andre'
Andre'
I am quite excited about the Chameleon. I have a few questions.
1. Is it sold in a kit form?
2. is there any equipment needed (such as programmers)?
Thanks,
Brandon C.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
No purchase necessary. See back panel for more details.
Tired of the same old robot brains? not enough processing power? Get the Propeller Robot Module now!!
2. Yes and no. You can program the Propeller with just a serial cable, but to program the AVR/PIC you need a programmer. HOWEVER, both systems have bootloaders loaded on them, so you can program them without. In the case of the PIC, we have a little setup so you can use a text editor and then download with the command line compiler and programmer. With the AVR, its got the ardunio bootloader, so you can use the arduino toolchain to program and download. But, I suggest you spend $20-40 and get an official programmer for either unit; pickit2 or the AVR ISP MKII respectively. We will sell them as well for a reduced price if you buy them with the systems. Or you can buy a clone off sparkfun etc that is compatible with AVRstudio, MPLAB etc.
Andre'
I wonder how we can control parallax graphics driver from the pic/avr·and to call functions like plot() etc...
Do we have to program the propeller for that, or all of this is accessible through c/c++ on the other uC?
Fred
Of course, to start you off I have written software that runs on the AVR (or pic) that has an API to send commands thru the SPI interface, then running on the Prop I have written a spi virtual peripheral that listens for packets, then it gets them. Then another processor parses the packets and then issues commands to the other objects that you have loaded in. And of course you are free to re-write the driver, use other objects ,etc. the point is this is a "model" or template of how to use the Prop as a slave. Think of it as an X-terminal slave, same idea.
Here's an excerpt from the top level prop driver:
COMMENTS: This is the Chameleon generic driver "Default 2". It's not meant to be fast or sexy, but simple a good example of interfacing to multiple drivers on the Propeller chip. This version of the driver "Default 2", uses my HEL tile engine to augment the graphics on the NTSC screen and give you more "gaming" opportunities. Other than that this driver is the same as the "Default1" driver. This driver simply has more commands. However, the same simple Terminal I/O commands that work on the NTSC Default driver work here. Thus, as long as you don't need more than 32x24 characters on the screen you should use the higher performance Default2 version. But, bottom line is you can use any objects you want and make you own drivers these are just examples! This drivers supports the following capabilities: 0. COG 0 - runs SPI channel message dispatch and MCP (master control program). 1. COG 1 - runs ASSEMBLY language "virtual" SPI interface that AVR/PIC communicates with. 2. NTSC video (1 COG) - simple "terminal" or more advanced graphics tile engine. 3. VGA video (1 COG). 4. Multi-channel audio (1 COG). 5. Keyboard or mouse (0/1 COG). 6. I/O to the Propeller "Local" I/O 8-bit port. (Uses COG 0, runs in main thread for now). Total COGS 5-6 From the AVR/PIC side you can write a lot of interesting programs that leverage these simple drivers, then as your needs change follow the documentation tutorial on how to modify this driver, so you can alter and enhance its functionality and try different "Objects" from the Parallax Object Exchange or other sources. ARCHITECTURAL OVERVIEW: This system works by the host (AVR/PIC) sending commands over the SPI interface to the virtual SPI driver running (launched by this object), then as commands come thru the SPI data stream they are parsed and dispatched to the proper drivers running on other COGS. Here's a visual of what's going on: AVR/PIC <--------> SPI <-----------> Prop (virtual SPI Interface ASM language) | | | | | | | | | |--NTSC driver -----> TV monitor | | | | | | | |------VGA driver -----> VGA monitor | | | | | |----------Keyboard driver -> PS/2 keyboard | | | |--------------Mouse driver ----> PS/2 mouse | |------------------Sound driver ----> Audio amp or TV . . . (more drivers)Then here's an example function from the AVR/PIC API I developed that you call from C/C++ to send the commands to thru the SPI channel:
int Mouse_Read(gid_event_ptr mouse) { // this reads the mouse delta position and button state and stores the results in the sent mouse record #define MOUSE_DELAY_SCALE 1 // this local scale factor helps tune this delays for a longer critical path thru the driver // use larger number if things get funky _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // read delta x position first SPI_Prop_Send_Cmd( MOUSE_CMD_DELTA_X, 0x00, 0x00); _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // now read data from SPI buffer mouse->x = SPI_Prop_Send_Cmd( READ_CMD, 0x00, 0x00); _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // read delta y position SPI_Prop_Send_Cmd( MOUSE_CMD_DELTA_Y, 0x00, 0x00); _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // now read data from SPI buffer mouse->y = SPI_Prop_Send_Cmd( READ_CMD, 0x00, 0x00); _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // read delta z position SPI_Prop_Send_Cmd( MOUSE_CMD_DELTA_Z, 0x00, 0x00); _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // now read data from SPI buffer mouse->z = SPI_Prop_Send_Cmd( READ_CMD, 0x00, 0x00); _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // read buttons SPI_Prop_Send_Cmd( MOUSE_CMD_BUTTONS, 0x00, 0x00); _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // now read data from SPI buffer mouse->buttons = SPI_Prop_Send_Cmd( READ_CMD, 0x00, 0x00); _delay_us(MOUSE_DELAY_SCALE*SPI_PROP_DELAY_LONG_US); // return success return(1); } // end Mouse_ReadThus, from your point of view as a programmer on the AVR/PIC to control the mouse on the Prop all you do is a single line of code:
Mouse_Read(...) !!!!
The Prop boots up, ready to go during power, default driver is loaded, and its just waiting for commands like this one --
Andre'
Post Edited (AndreL) : 9/12/2009 2:57:07 AM GMT
This sounds like an interesting piece of Propeller code. Any chance that you have released the Propeller Source/Binary,
along with some schematics in the package like you did with the Hydra product? I'm not really interested in programming
a PIC/AVR, but this sounds like an interesting setup for multi-Propeller setups as well.
I could imagine a very nice dual Propeller setup along the same lines....
OBC
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
New to the Propeller?
Visit the: The Propeller Pages @ Warranty Void.