

Persistence of Vision Robot, aka Mr. Spinny (now with pictures showing POV)

OK, here we go -- the concept is quite simple -- a small tabletop 'bot with a single QRD1114 IR/emitter sensor on the bottom runs around looking for a black tape line (same line that a line-follower might pick up). Upon finding the line, the 'bot spins *very* fast and uses the seven-LED bank to do persistence-of-vision text. As the sensor passes the line on each revolution (actually, twice each revolution), it uses the line as a "sync mark" to restart the first column of pixels of the text string.
Basically it sits around showing a dim pattern on the LEDs and plaintively beeping occasionally. When disturbed, it roams around and does it's POV thing when it finds a line. The same detector is used for a "cliff" detector as well (RC decay on the QRD1114). A cds cell with sigma-delta ADC is used for determining if it's too bright to make POV worthwhile.
A small calibration routine is run upon powerup/reset that lets the user hold the 'bot over the tabletop surface, the line, and the "cliff" edge so... the stored values are used for determining thresholds when reading grays through the QRD detector. I would have done just about *anything* to have even 6 bytes of EE on an SX for this -- there was no way I would be able to spare codespace for I2C or SPI routines for an external EEPROM -- unfortunately, the next 'bot like this may be on an AVR for just this reason -- but I digress

It's highly effective, truly. I will try to get video up sometime in the next few weeks. With the cover on, the sound out of the piezo is much better, looks more finished, and the "cloudy" translucency of the case only adds to the POV effect.
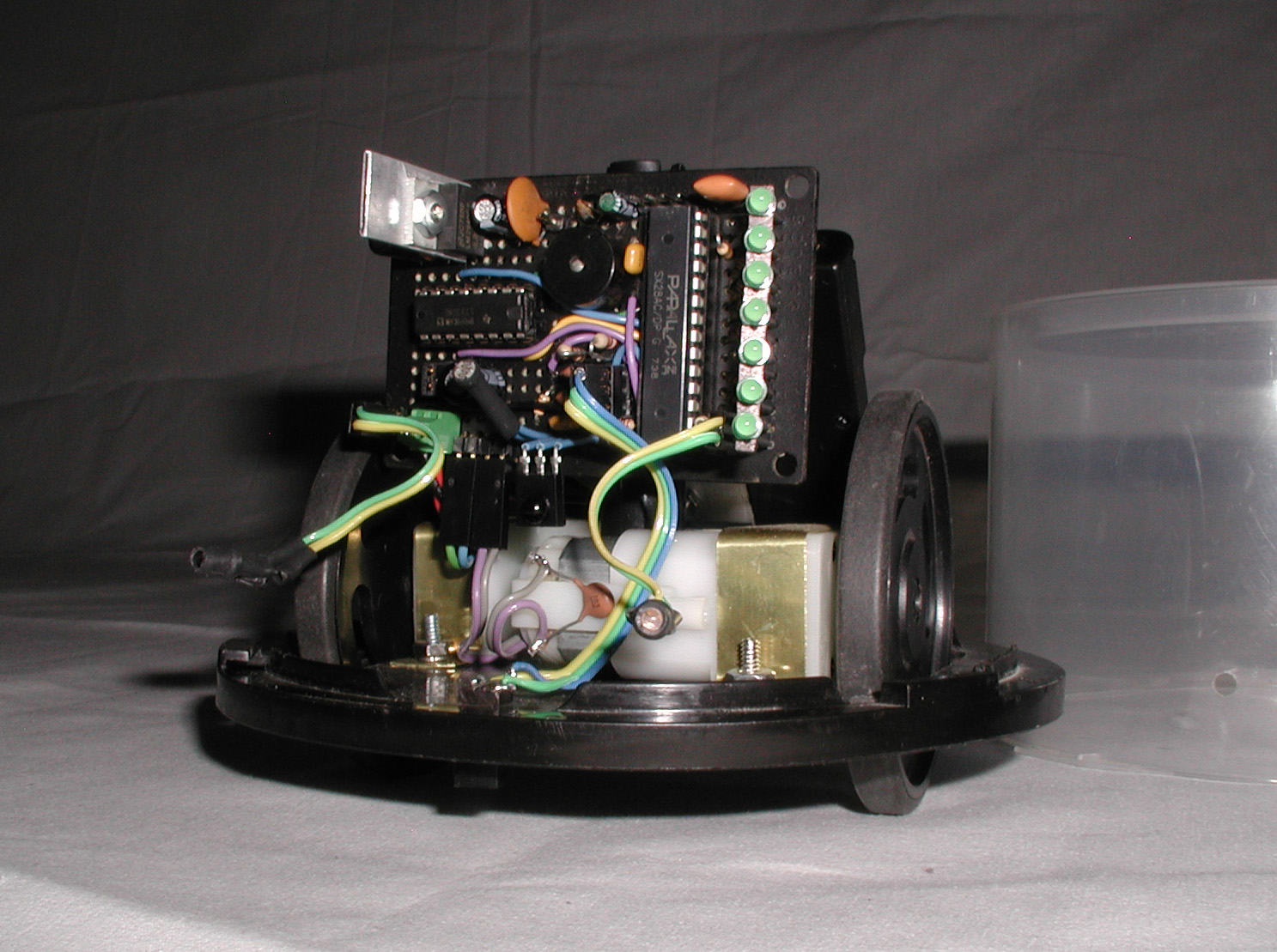
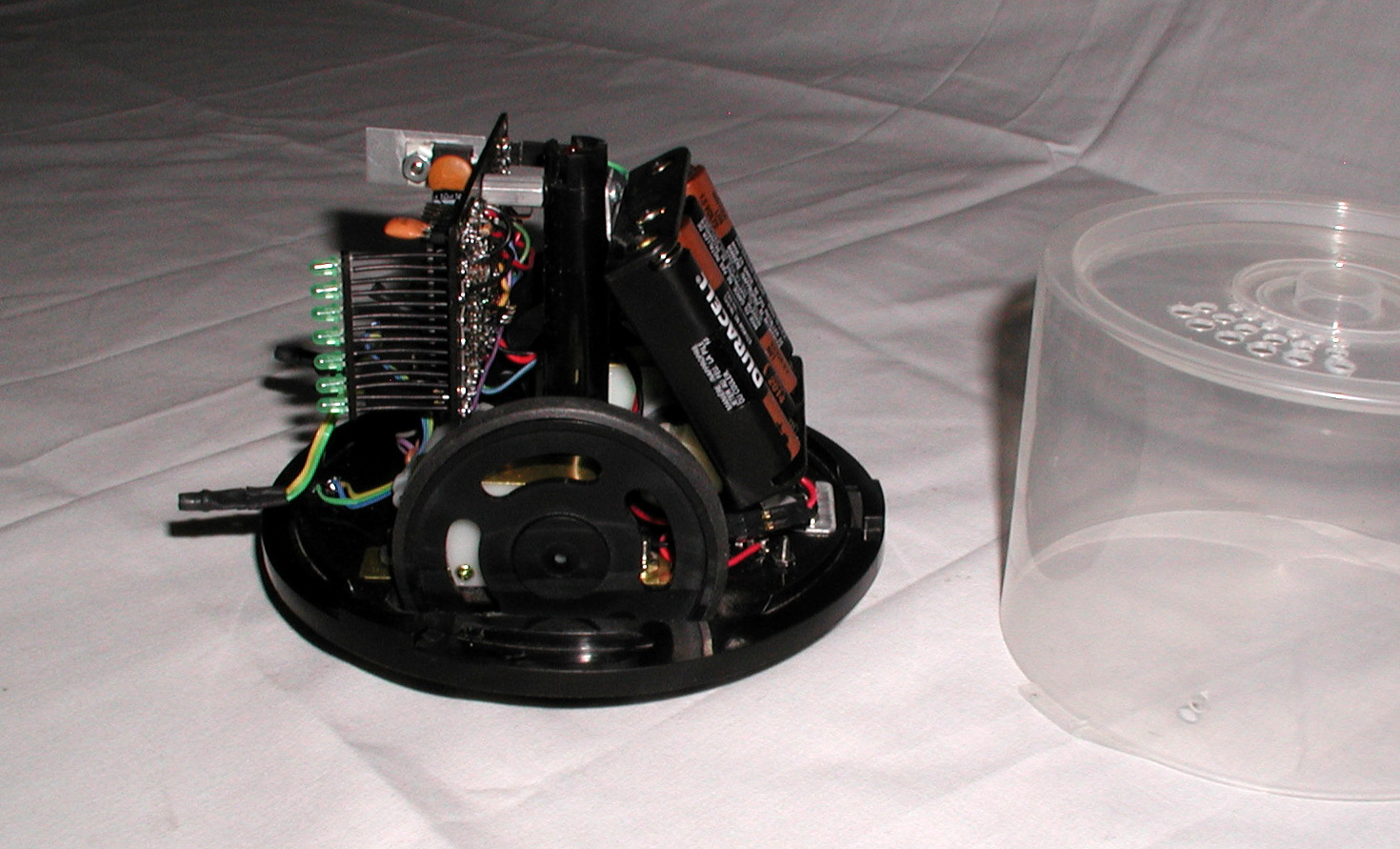
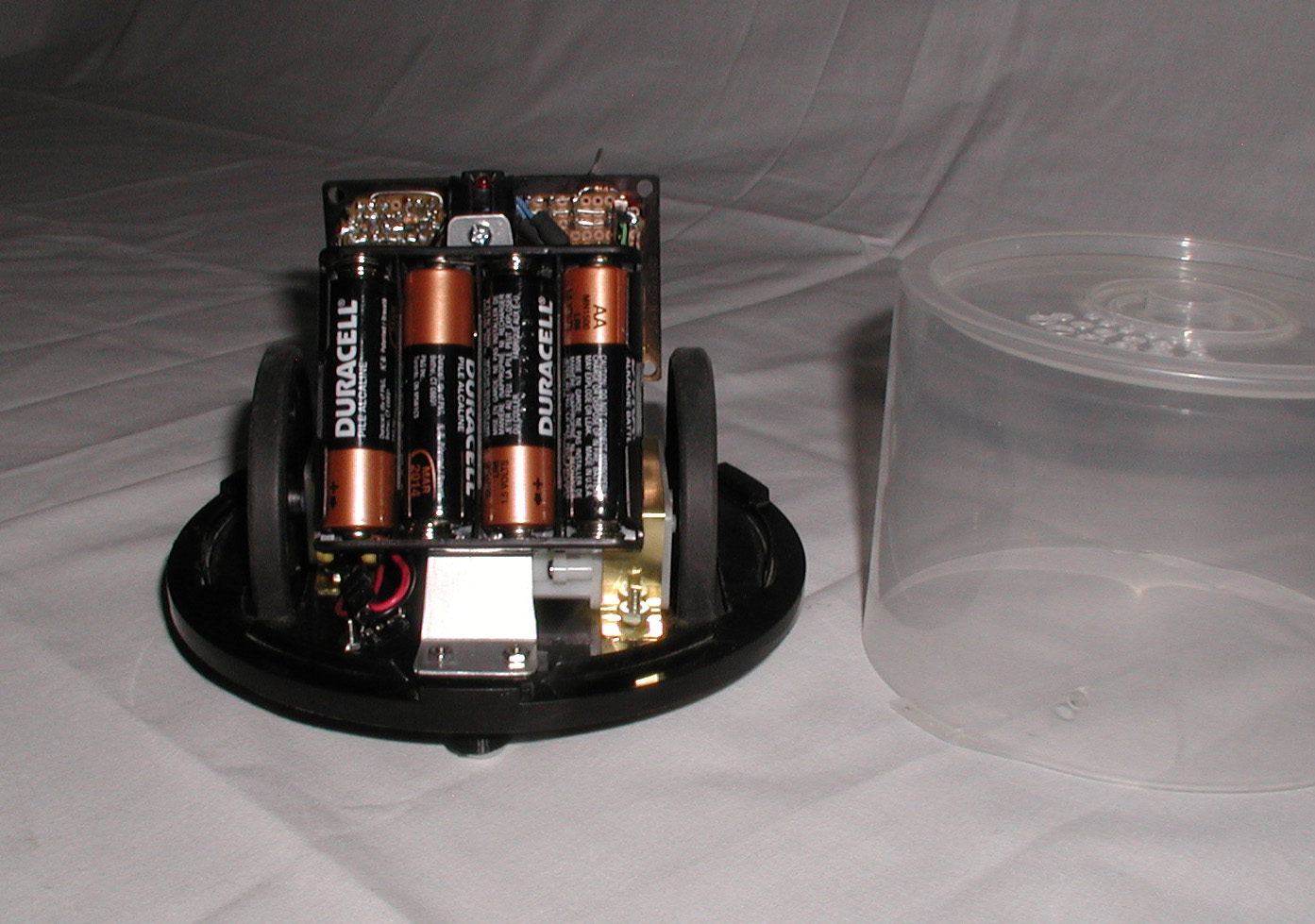
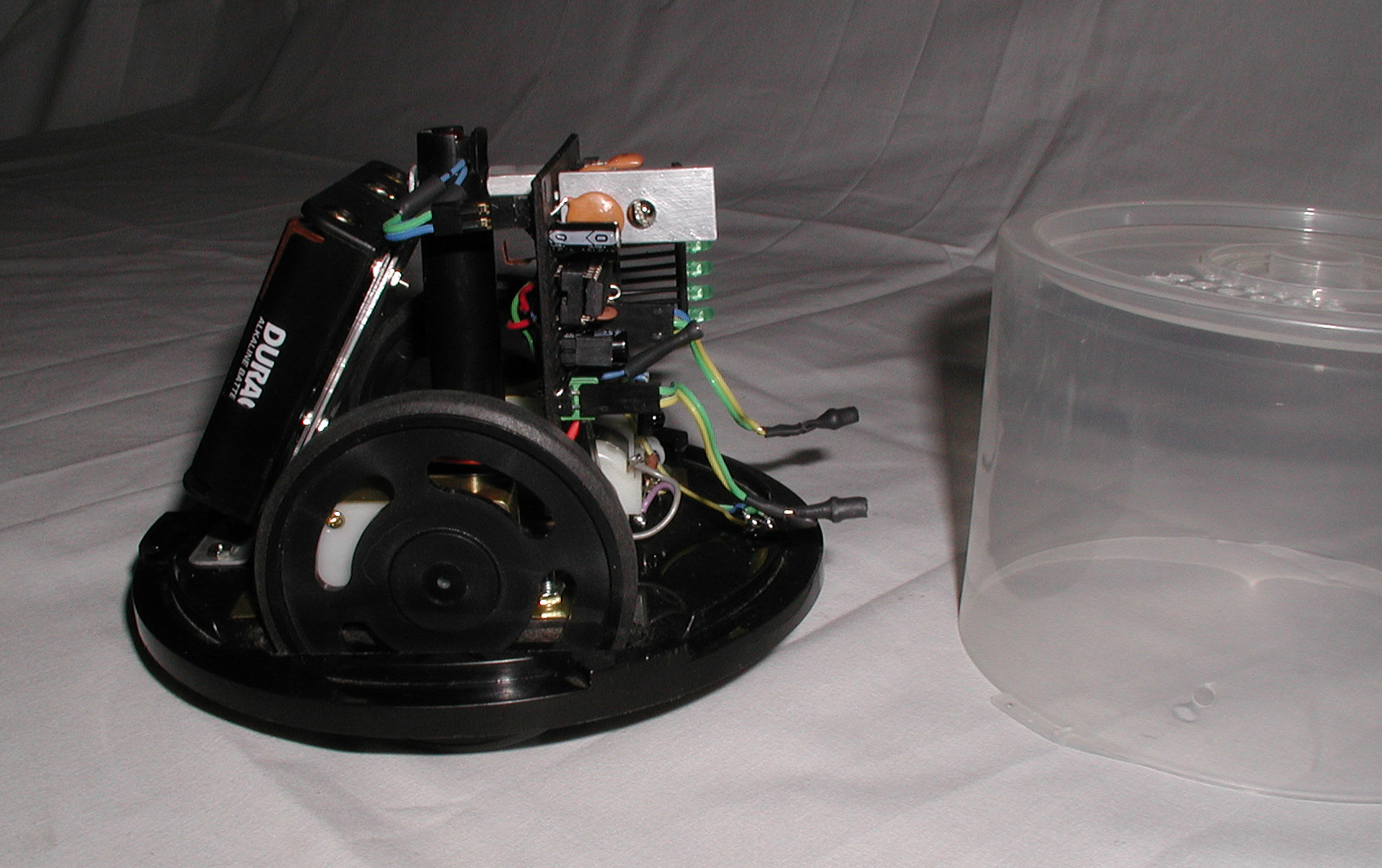
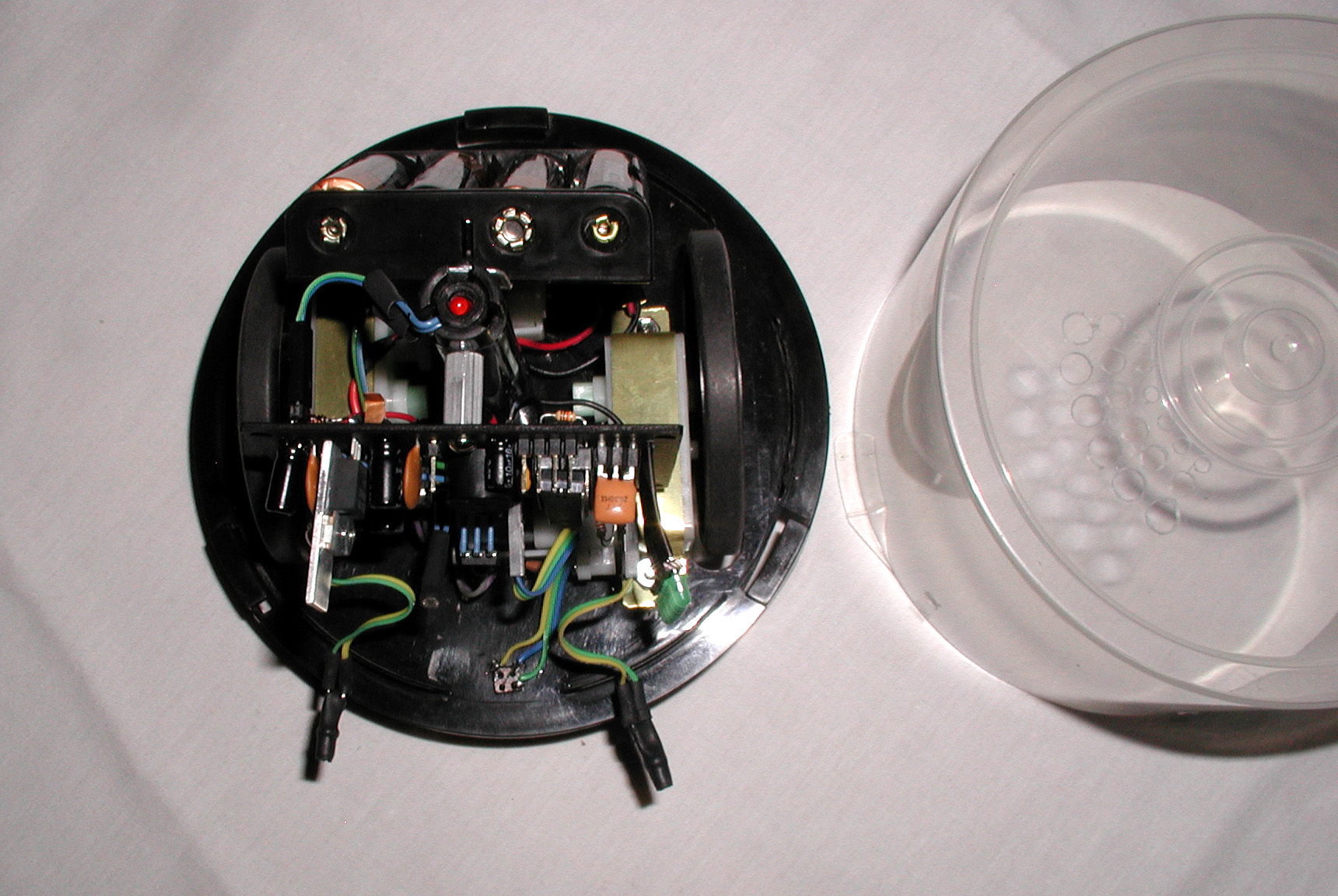
In any case, the basic chassis is a CD spindle case. A thin bit of craft plywood was glued on the underside to stiffen it up. Minimal parts (see plans and cutting template PDF) -- a Pololu cheapo tiny caster, two Solarbotics GM8 gearmotors, an SX, misc parts.
One side note -- the GM8s were not quite fast enough for decent POV, so I purchased Solarbotics' faster motor-only upgrade for the GM8/2 gearboxes -- the pair was perhaps $3 or $4 and are 4x faster. Truly exceptionally cosmically fast. In the first test with the new motors, the thing flew off the table top a full five feet in into the air before crashing to ground. Generally the 'bot is throttled wayyyyyy back while roaming, it only goes full speed in a spin.
Lastly, I *did run lots of tests* with IR emitters inside the translucent CD case -- I can assure you that such plastics are translucent to IR as well -- the IR both reflects AND passes through the plastic. So detectors are no problem, but I had to drill small holes in the case for the IR emitters (press fit -- there are two-pin header connectors for both LEDs so the case top is easily removed for programming or battery changes.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When the going gets weird, the weird turn pro. -- HST
1uffakind.com/robots/povBitMapBuilder.php
1uffakind.com/robots/resistorLadder.php
Post Edited (Zoot) : 2/25/2010 10:55:34 PM GMT
1487 x 1109 - 376K
1470 x 891 - 319K
1393 x 979 - 299K
1695 x 1065 - 431K
1720 x 1152 - 519K
Comments
- schematic
- full-size drilling/cutting templates (I usually print these on card stock, tape or glue them to raw pieces, then drill/cut right through the cardstock)
- SX/B and .SRC code (most of my SX/B ends up as assembly, however)
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When the going gets weird, the weird turn pro. -- HST
1uffakind.com/robots/povBitMapBuilder.php
1uffakind.com/robots/resistorLadder.php
Post Edited (Zoot) : 11/3/2009 12:38:34 AM GMT
The first two he is roaming, the third and fourth he is spinning on the line.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When the going gets weird, the weird turn pro. -- HST
1uffakind.com/robots/povBitMapBuilder.php
1uffakind.com/robots/resistorLadder.php
Post Edited (Zoot) : 2/25/2010 10:54:54 PM GMT
-Phil
Fantastic robot. Very creative. Like Phil, I love the use of the CD case. Your workmanship is very nice as well. Thanks for posting this! I look forward to video...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
Post Edited (Whit) : 6/10/2009 2:02:44 AM GMT
humanoido
Thank you for sharing this project I would love to see your AVR one as well
Post Edited (mikediv) : 11/1/2009 9:23:14 PM GMT
Much of my code starts as high-level SXB and eventually gets hand translated down to assembly to maximize code space, so it can be a bit dense. In block form, my basic SX-based 'bots follow a flow like this:
ISR: ' interrupt at either ~77_000 or ~154_000 so that serial comms are doable as well as providing easy alternate bits for ~38khz IR emitters Increment basic timecounters (ms) Increment basic IR counters (ticks, state timer) Increment ISR counter (used as prescaler for pseudo-tasks in ISR Toggle IR Emitters based on state as set from mainline, e.g. IF irState.0 = 1 THEN ' on state IF irState.1 = 0 THEN ' left/right? irEmitterLeft = ~irEmitterLeft ELSE irEmitterRight = ~ irEmitterRight ENDIF ENDIF Alternate ISR runs: (i.e. using bit.0 of the ISR counter, these run every other time in the ISR so things don't bog down: Count sensor inputs (i.e. IR detector, sigma-delta ADC), e.g. IF irDetector = 0 THEN ' active low IF irHits < 255 THEN ' prevent rollover irHits = irHits + 1 ENDIF ENDIF Output motor PWM Isr Done '---------------------------------- MainLine: Update actual timers and clock based on counters from ISR, e.g. IF msCntr > #77 THEN msCntr = msCntr - 77 INC milliSeconds INC irTmr ' etc ENDIF Update sensors, usually some kind of simple state machine based on counts from ISR, e.g. IF irState.0 = 0 THEN ' set up to emit pulse IF irTmr >= 3 THEN '3 ms off between pulses irHits = 0 ' remember this counter is incremented in the ISR based on detector "hits" irTmr = 0 ' this timer is a millisecond tmr handled by the mainline INC irState ' when bit.0 of state is 1, you are emitting and reading detector, bit.1 determines left/right ENDIF ELSEIF irState.0 = 1 THEN IF irTmr >= 2 THEN ' 2 ms pulse IF irHits >= SomeThreshold THEN flag = 1 ELSE flag = 0 ' no hit ENDIF IF irState.1 = 0 THEN ' you are on left LED irObstacleLeft = flag ELSE irObstacleRight = flag ENDIF irTmr = 0 INC state irState.2 = 0 ' rollover to zero IREmitterLeft = 0 ' turn off LEDs so ISR doesn't have to IREmitterRight = 0 ENDIF ENDIF Update Motors: ' mainline sets values, but ISR handles moving this PWM (or servo) output IF irObstacleLeft = 1 THEN motorLeft = 255 motorRight = 0 ELSEIF irObstacleRight = 1 THEN motorLeft = 0 motorRight = 255 ELSE motorLeft = 200 motorRight = 200 ENDIF Go to top of main and do it again...▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When the going gets weird, the weird turn pro. -- HST
1uffakind.com/robots/povBitMapBuilder.php
1uffakind.com/robots/resistorLadder.php
Post Edited (Zoot) : 11/3/2009 4:45:50 PM GMT
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When the going gets weird, the weird turn pro. -- HST
1uffakind.com/robots/povBitMapBuilder.php
1uffakind.com/robots/resistorLadder.php
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When the going gets weird, the weird turn pro. -- HST
1uffakind.com/robots/povBitMapBuilder.php
1uffakind.com/robots/resistorLadder.php
photographing POV is an art unto itself.
To improve success, you can increase the odds of capturing the effect
by using a longer exposure and a focus centered on where the
image is formed. Usually cameras have settings to set EV (image
brightness) and a menu with modes such as "Twilight, High
Sensitivity, and Program." These settings are ideal for tweaking the
POV image.
humanoido
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Often the joy is not so much in the having, its in the building...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When the going gets weird, the weird turn pro. -- HST
1uffakind.com/robots/povBitMapBuilder.php
1uffakind.com/robots/resistorLadder.php