

Propellar Auto Pilot status
 Old man Earl
Posts: 46
Old man Earl
Posts: 46
I'll start a new thread on the prop autopilot using the wii nunchuck guts.
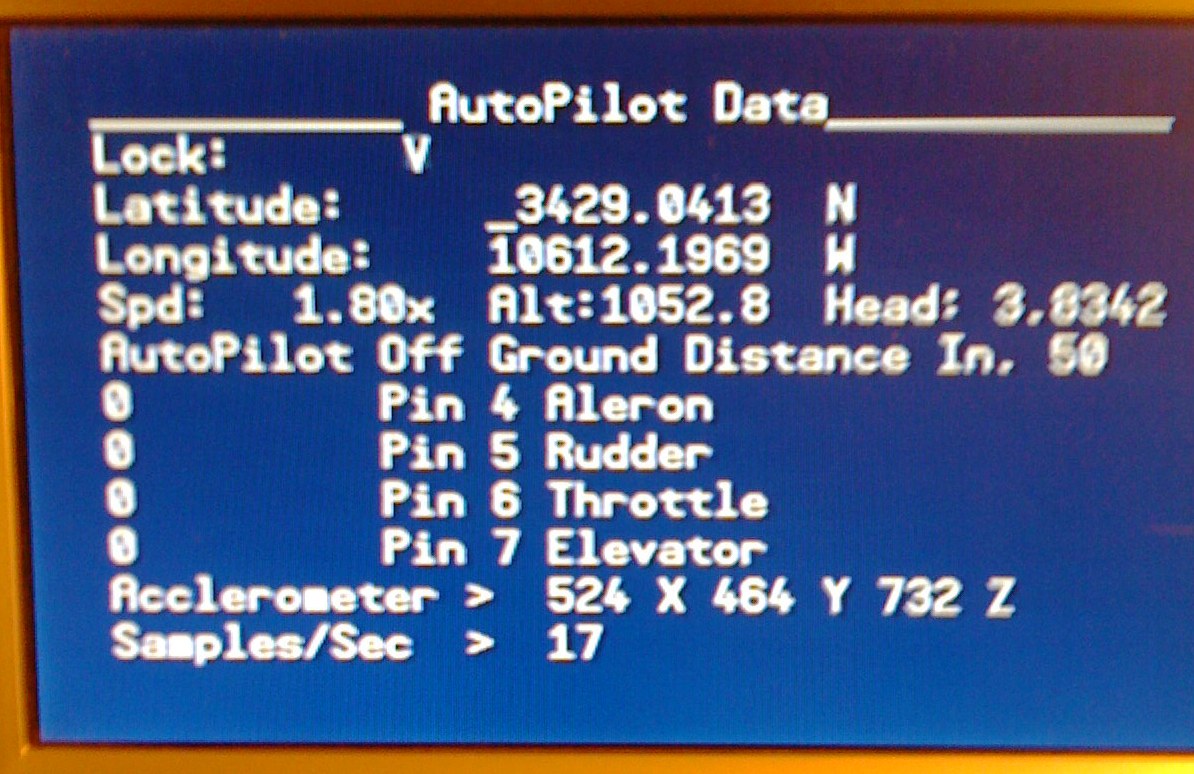
Here is a pic of the output on a LCD tv screen
We now have a 3 axis accelerometer from a wii nunchuck $15
altitude (up to 10 feet) via a prop 'ping' module from parallax (for landing) $29
a 5 Hz GPS module from sparkfun $59
http://www.sparkfun.com/commerce/product_info.php?products_id=8975
The barometer module is $39 from here
http://www.quadroufo.com/product_info.php?cPath=1_4&products_id=41&osCsid=2910ac278a02c18b5d485093ae6d2f45
Gonna add the compass Hitachi HM55B Compass Module from Parallax $29
http://www.parallax.com/Store/Sensors/CompassGPS/tabid/173/CategoryID/48/List/0/Level/a/ProductID/98/Default.aspx?SortField=ProductName,ProductName
and the barometer module for altitude in software soon.
Code below as of 3/30/09
Post Edited (Old man Earl) : 3/31/2009 6:46:20 AM GMT
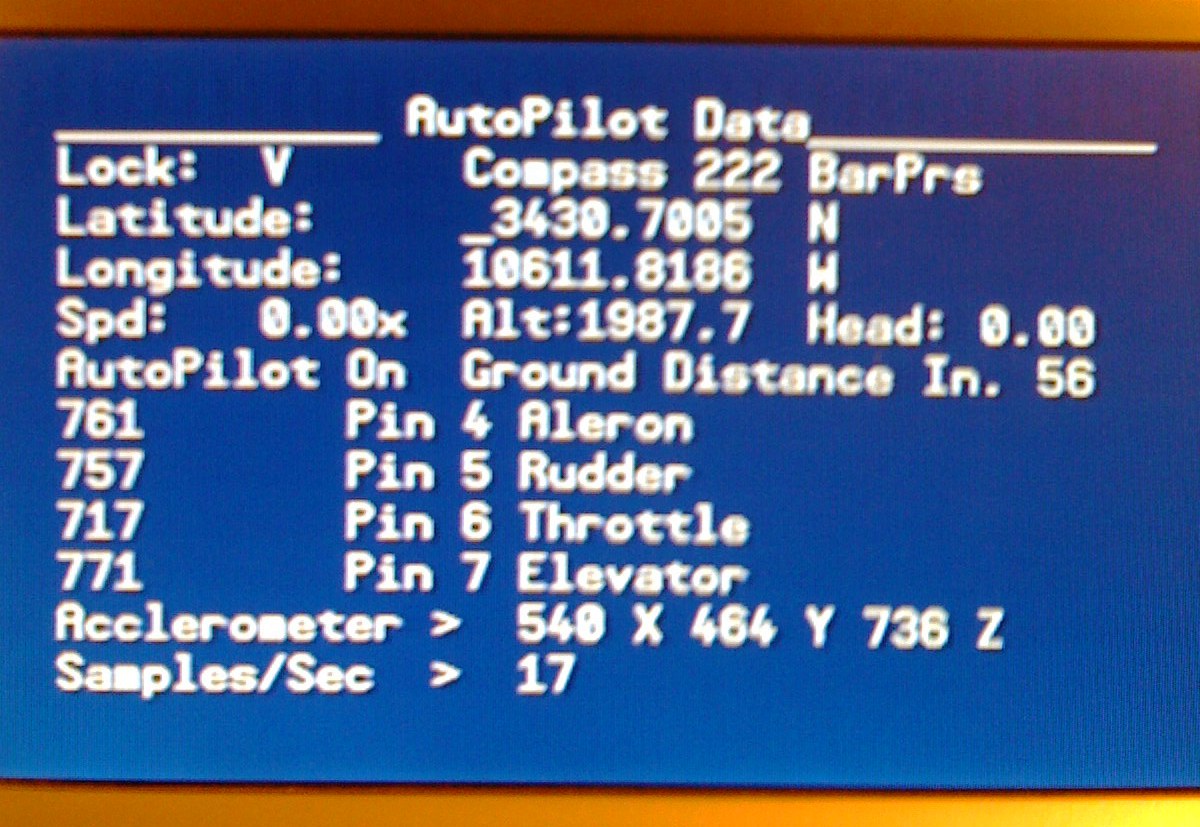
Here is a pic of the output on a LCD tv screen
We now have a 3 axis accelerometer from a wii nunchuck $15
altitude (up to 10 feet) via a prop 'ping' module from parallax (for landing) $29
a 5 Hz GPS module from sparkfun $59
http://www.sparkfun.com/commerce/product_info.php?products_id=8975
The barometer module is $39 from here
http://www.quadroufo.com/product_info.php?cPath=1_4&products_id=41&osCsid=2910ac278a02c18b5d485093ae6d2f45
Gonna add the compass Hitachi HM55B Compass Module from Parallax $29
http://www.parallax.com/Store/Sensors/CompassGPS/tabid/173/CategoryID/48/List/0/Level/a/ProductID/98/Default.aspx?SortField=ProductName,ProductName
and the barometer module for altitude in software soon.
Code below as of 3/30/09
Post Edited (Old man Earl) : 3/31/2009 6:46:20 AM GMT
1194 x 774 - 210K

1200 x 827 - 224K
Comments
Now for the barometer !
There is still a lot of work like relaying all the data to the ground, acting upon it, and using the rc tx to send new data!
Earl
Post Edited (Old man Earl) : 4/1/2009 2:02:37 AM GMT
Here is some pics of the test hardware YEA, thats a karoke machine im using for a tv display. When i am stuck, i put on some tunes and belt it out ! my stress reliever !!
You should see the 'ping' device, a 32 ch. GPS 5 hz ,Nunchuck guts,compas,and the baromiter/temp/altituder,tv out, 8 ch 72mhz synth rc rx sd 2g card, rc TX in background and my scope!
Earl
Post Edited (Old man Earl) : 4/1/2009 4:37:06 AM GMT
This is way cool! I will keep watching the thread. Also, I have a 3.0" LCD TV display you could buy from Brilldea and make a portable display with it. I am also considering adding that very same GPS module to our store. I have communicated with the supplier and I have two on my desk that I am testing now. It is a nice module!!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com - Prop Blade, LED Painter, RGB LEDs, 3.0" LCD Composite video display, eProto for SunSPOT
www.tdswieter.com
What flying platform are you developing for?· Is it an RC Helicopter?· It seems like you will need some way to monitor the orientation of the aircraft.· If it's not moving the accelarometer can be used as a tilt meter, but you will get ambiguous results if the aircraft is accelarating.· You would need to add a 3D gyro to determine if the aircraft is rotating.
I'm working on a "hovering" rocket platform.· I have done a few flights using a 2D gyro chip to keep it vertical.· I plan on adding an accelarometer so I can determine it's altitude and fire retro-rockets at the correct time.
Dave
I hope when I get the software to the point I can read all the sensors, someone will help on the flight controller stuff. Right now the baro i2c is eluding my efforts to read the data, tho I can see it at the proper i2c address. I need to study more on the i2c communications. When your 63, the ole brain don't work as good as it used to ! CUL
Earl
here is tv pics and new code..
Earl
Earl
Earl
I guess I should put this in the Obj section
Post Edited (Old man Earl) : 4/5/2009 9:22:31 AM GMT
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com - Prop Blade, LED Painter, RGB LEDs, 3.0" LCD Composite video display, eProto for SunSPOT
www.tdswieter.com
here is the formula
altitudeF :=((1-(mmHg*1.333224/1013.25)^0.190284)*145366.45)
The module reports 604 mmHg in variable mmHg. How to convert in spin using 32 bit math routines ???? Want result in variable altitudeF word.
I also have the temp in F or C from the module to compensate for temp.
Thanks , Earl
My code to look at...
Post Edited (Old man Earl) : 4/5/2009 7:48:58 PM GMT
I've always been curious how you can get a reliable reading from air pressue. The pressure changes as a storm moves in/out. I'm guessing you have to caliberate upon take off? But then, the pressure changes while you're up there - not because of altitude, but because of weather changes. Just curious...
In my experience if the pressure changes that quickly you have far more to worry about than the potential loss of a flying model!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Cardinal Fang! Fetch the comfy chair.
You can compute the expression using 32-bit fixed point values with logs and anti-logs.· The expression would look like the following:
·· altitudeF := ((10000 - aLog2(Log2(10000) + ((Log2(mmHg) - Log2(760)) * 1903)/10000)) * 145366) / 10000
The floating point values are scaled up by a factor of 10,000 in this expression.
I·have never used the propeller, but I know it has log and anti-log tables.· According to the propeller manual the tables are scaled·up by 16 bits.· I wrote a C program to simulate this.· It is attached below.··With a value of 604 for mmHg I got a result of 6218.02 using floating point·math, and a value of 6221 using fixed point.
Dave
If you guys get tired of me posting the progress......... let me know !
The XBee stuff is not in ...yet
Will get it next week.. Got in on the $99 development deal !
Post Edited (Ole Man Earl) : 4/10/2009 12:24:23 AM GMT
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com - Prop Blade, LED Painter, RGB LEDs, 3.0" LCD Composite video display, eProto for SunSPOT
www.tdswieter.com
Maybe have 5 modes
Mode 1 = RC only
Mode 2 = RC with onboard stabilation
Mode 3 = Return to base for any number of reasons ....Battery low, XBee not recieving, etc
Mode 4 = Go To a way point
Mode 5 = Follow a course...
Mode 999 = Find Osama Bin Laden and take him out ..... (takes extra batteries !)
Once you have the sensors, prop, video, xbee, gps, and the hardware stuff...its all a matter of what you wanna do...
Beside the UAV sending the XBee data it will also send a video overlay from the camera. Maybe 2 video transmitters, one for the AP screen and one for the live video. What do you think ?
Keep taking the baby steps and I think the best system will be built up. Time and experience will tell if you need all some, or even more equipment.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com - Prop Blade, LED Painter, RGB LEDs, 3.0" LCD Composite video display, eProto for SunSPOT
www.tdswieter.com
1. GPS - 5Hz model
2. Compass - Parallax H55B i2c
3. Accelerometers - Wii Nunchuck Knockoff
4. Barometric pressure module i2c
5. Ping sensor - Parallax
6. RC Receiver - Synthesized 72 Mhz ModelRP8D1
7. Servo Output from prop board
8. i2c to compass and Barometric pressure module
9. Auto pilot video screen
Ya, I think we have come a ways...still a lot to do....
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com - Prop Blade, LED Painter, RGB LEDs, 3.0" LCD Composite video display, eProto for SunSPOT
www.tdswieter.com
I'm only kidding. It seems that with more powerful processors, programmers have gotten lazy. I wasn't around waaay back in the day, but looking back, I'm amazed that you could run something like windows on a 386. Granted, alot of people have pulled off some amazing things with the propeller, so I'm not knocking you guys at all.
You're totally right, Timothy, but man... $1 a cog? I know it's nearly 10 days later, but I'm still blown away at the price...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com - Prop Blade, LED Painter, RGB LEDs, 3.0" LCD Composite video display, eProto for SunSPOT
www.tdswieter.com
It had 1 K of ram. LED's and Switches on the front panel were all ya had.
Told ya I was an OLD dude !
Can hardly wait for prop II
Post Edited (Ole Man Earl) : 4/10/2009 5:15:35 AM GMT
Most sensors working:
HM55B Compass
Baro and Temp Module i2c
Wii ACCL i2c module
GPS Module
Ping Module
72 Mhz RX R/C Module
Servos
To get working:
XB module
Gyros
THEN....the ground station software:
This will rx data via XB and display on laptop screen.
A way to set waypoints.
A command to return to home
Set home position
and LOTS of other stuff... now needing prop II !!!
Post Edited (Ole Man Earl) : 4/14/2009 1:49:03 AM GMT
Please keep the info coming .. Old Man Earl can I ask are you going to put together some schematics??? and a parts list.. I can not tell from the photos if you have 4 independent motors or one main motor to control all 4 propellers?
Also can you tell us where you purchased the Gyros and Baro?
Very nice project.
Be back on the 16 th
Oh, 4 separate moters with 4 ESC's Electronic speed controllers , they run off the rc rx signals sent by the laptop.
earl