

Propeller with propellers
 JasonDorie
Posts: 1,930
JasonDorie
Posts: 1,930
I've been working on a quad-rotor project for a while, but the Propeller chip made my life a lot easier.· Remote control in and servo output each on their own cogs is a LOT easier and more accurate than using interrupts.· It's not finished yet, but I've now had my first few successful flights in my garage.
Video:
http://jasondorie.com/WordPress/?cat=3
Jason
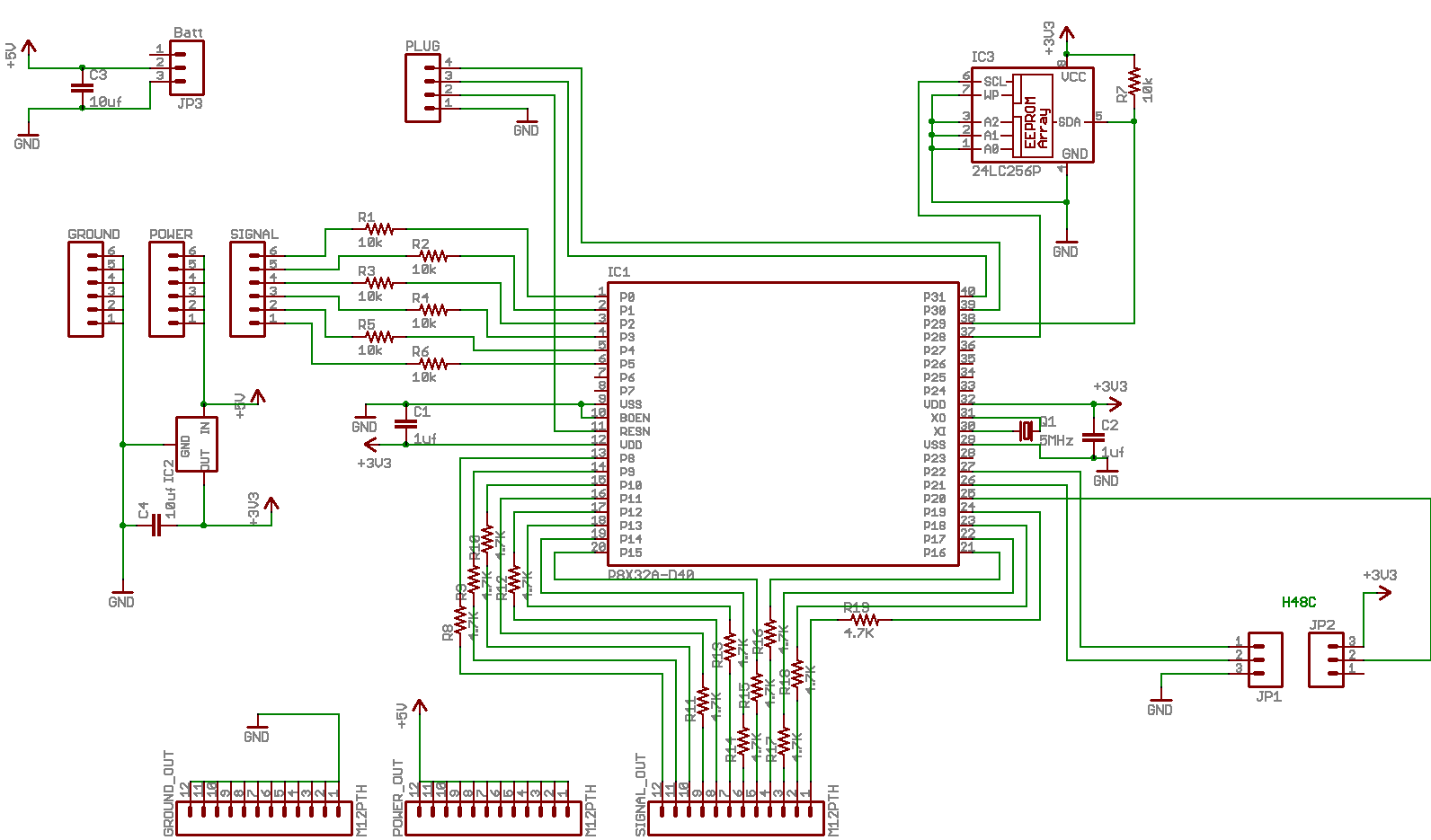
Update: Oct 13, 2008 - Code and schematic are attached.· Note that the 'H48C' in the schematic is now an MCP3208 connected to a dual-axis gyro and an accelerometer.· The interface is identical.
Post Edited (JasonDorie) : 10/16/2008 6:34:51 AM GMT
Video:
http://jasondorie.com/WordPress/?cat=3
Jason
Update: Oct 13, 2008 - Code and schematic are attached.· Note that the 'H48C' in the schematic is now an MCP3208 connected to a dual-axis gyro and an accelerometer.· The interface is identical.
Post Edited (JasonDorie) : 10/16/2008 6:34:51 AM GMT
zip
35K
1592 x 935 - 51K
Comments
Nice project and great execution!
I have been looking at the Draganflyer, but feel it is way over priced.
I would definitely be interested in your Propeller code and how you established the stabilization of the platform.
Regards,
TCIII
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If you are going to send·a Robot·to save the world, you·better make sure it likes it the way it is!
Is this indeed a finished project (As this forum is for)? Your first post indicates it is a work in progress.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Engineering
A couple of questions:
Are the motors outrunner brushless or what?
The receiver appears to possibly be a Spektrum unit, possibly an AR6000 or AR6200?
Are you running a lipo battery and if so what size?
How long can it stay in the air?
Have you determined what kind of payload it can handle?
Regards,
TCIII
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If you are going to send·a Robot·to save the world, you·better make sure it likes it the way it is!
It's finished in the sense that it now flies and is reasonably stable. Prior to posting I hadn't read the rules on finished/unfinished, so I apologize. I will comment the full code enough that others should be able to read it, and will post the schematic and code for what you see in the video.
It's unfinished in that I want to add self-levelling to the flight control loop, and the plan is for this to ultimately have moveable rotors (like an Osprey) and real wings, so it'll fly normally, or do VTOL. I figured the VTOL part would be the hardest, so I did that first.
Jason
Okay, yes, please add schematics and code to make it complete.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Engineering
The receiver is a Spektrum AR6200, but anything should work. Motors are indeed brushless. Motors are 1050Kv, 20A max, and I'm using TowerPro 20A brushless speed controls. A pair of 3 cell, ThunderPower 2070 batteries in parallel gives it about 4.1Ah of power, and I have yet to figure out my power draw exactly. At 2 Lbs, 13 oz, it's pretty heavy with the packs loaded, but it hovers at approximately 1/2 throttle.
I haven't figured out the flight duration, but I suspect it's around 6 minutes or so. To be fair, I'm not using the most efficient prop for this kind of flight. I think my props are 8.5x6, but if I were to go to a lower pitch with larger diameter it would be more efficient. Ultimately I want the thing to do 'plane like' flight as well as hover, so I wanted the props to balance between fast forward flight and decent hover performance. If I was going for JUST hover performance, lower KV motors and 10x4 props would probably be much better for payload capacity and flight time.
Also, the platform is still somewhat unstable, though that's in my garage in a lot of propwash, so it might not be as bad as I think.· I fly R/C helicopters, so I'm pretty good at controlling the thing.· This would not be something I'd recommend for someone with no flight experience.· If and when the self-levelling works it'll be easier to handle.
Jason
Post Edited (JasonDorie) : 10/14/2008 4:28:28 AM GMT
Thanks for the info on the Propeller heliplatform.
Regards,
TCIII
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If you are going to send·a Robot·to save the world, you·better make sure it likes it the way it is!
Jason
I am not able to view the schematic using gEDA schematic editor in Linux. Can you post it as a jpg?
Item 2 is the wire extending from the bottom of the aircraft. Is it for stabilization or is it an antenna extension?
Ron
Jason
Actually I was hoping that you had a method of lengthening the 2.4 Ghz antenna. If that was the case, I was going to borrow the idea so I could use a 2.4 Ghz system on a submarine at periscope depth.
Ron
Here is a link to the Spektrum AR6200 that Jason is using: http://www.spektrumrc.com/Products/Default.aspx?ProdID=SPMAR6200
Regards,
TCIII
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If you are going to send·a Robot·to save the world, you·better make sure it likes it the way it is!
Ron
I suspect that the receiver antennas are 1/4 wave given their short length. As you can see, the AR6200 uses two receivers due to the directionality of the 2.4GHz signal compared to a 72/75 MHz signal.
If you need a longer antenna you might have to retrogress back to 72/75 MHz where the receivers use a long wire antenna that might be a 1/4 wave or even 1/2 wave.
I am presently using a Spektrum DX6i and a BR6000 which is a nice combination for a rover robot. I am able to control the DX6i with my PC through an Endurance R/C PCTx. If I can duplicate Jason's Propeller heliplatform, I plan to buy a AR6200 to go with my DX6i.
Just a thought.
Regards,
TCIII
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If you are going to send·a Robot·to save the world, you·better make sure it likes it the way it is!
I'm considering hooking it up to a scope to see if·I can figure out what the protocol is.· It'd be nice to have·an I2C or SPI receiver instead of having to interpret pulse widths.· [noparse]:)[/noparse]
Jason
·
I checked out your web site with the blog and videos. Might I recommend adding the videos to YouTube? They would be easier to watch and others can learn about your cool project.
Certainly keep us posted on your project.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC, eProto fo SunSPOT, BitScope
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com
My goal is to produce this: http://www.knifeedge.com/forums/showpost.php?p=56116&postcount=4 (it only exists in that simulator)
I want to start working on the airframe now, but to me that's more daunting than the electronics. The motors rotate forward for normal flight, and up to hover. I've been working on getting the 'static motor' version as stable as possible before I move on. I'd like to be able to hover it hands off, though it's actually quite stable now. I'll take a new video in a few days if I have time. I reduced the weight of the propellers, so the motor response is quicker, and I added code to 'help' level it, using the accelerometer and Kalman filters. If I turn it up too high it starts to oscillate, but even with it set low it helps quite a bit.
I'll post more as it happens. Thanks for the encouragement, everyone. Thanks especially to Parallax for this very cool chip. This is my 3rd quadrotor, and the Propeller-based version was the simplest to code by far, and the most fun. I get to spend more time tweaking and less time figuring out how to drive servos, read RC inputs, and do math on one thread. [noparse]:)[/noparse]
Jason
BTW, YouTube is a breeze.· They now have a high resolution viewing option to if you upload your video in a high res format.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC, eProto fo SunSPOT, BitScope
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com
CW CCW \ / \ / X / \ / \ CCW CWIf all rotors rotate at the same speed, the sum of the motor torque is zero.· To move left, the left pair slows down and the right pair speeds up, resulting again in a net torque of zero.
To change heading, one diagonal pair speeds up and the other diagonal pair slows down, resulting in a non-zero net torque, but identical net thrust.· I believe this is the same as the DragonFlyer.· Most quadrotors I've seen are arranged like a '+' instead of 'X', which seems odd since the '+'·layout produces some yaw torque when doing pitch or roll moves.
Jason
·
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC, eProto fo SunSPOT, BitScope
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC, eProto fo SunSPOT, BitScope
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com
Awesome job with hovering - where did you get those motors? I've been looking high and low for something strong enough (read as: generating enough lift) to lift a few batteries, controller hardware, and a camera into hover. Constant-speed (variable propeller blade pitch) props would be incredible, but I don't think anyone can shrink the mechanism down far enough to use in "hobby" engines. I've been experimenting with vectored thrust systems, which might be more stable than an anti-torque approach.
I'm a pilot, and this all seems so simple from inside the cockpit - most likely because I've never had to build my own aircraft from scratch.
Thanks!
Jamie
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
--
Jamie C. Pole
Principal Consultant
J.C. Pole & Associates, Inc.
http://www.jcpa.com/
It all depends on how much you plan to lift.· The one shown in the video pulled about 35A, and would probably lift 7 or 8 lbs, including itself (it weighs 3), but would only fly for 6 minutes on those packs, and produced more air speed than required.· The current version (all I changed was the props) will lift less weight (5 or 6 lbs) but will fly for 12 minutes on the same packs.· Going to lower RPM/Volt motors turning larger props would generate less thrust speed, but more overall lifting power.
I bought the motors from http://hobbycity.com, but there are lots of places that sell hobby motors with the kind of power you're looking for.· There are also variable-pitch systems available, though they tend to be for small planes.· I've considered using tail assemblies for a model helicopter to see if that would work, but I suspect the paddle-style props aren't as efficient as what I'm using now.· The servo to drive the pitch would add weight, but would make the thing more responsive, and able to fly inverted.
For inexpensive stuff, I usually look at HobbyCity, NitroPlanes, or BPHobbies.· For better quality, but higher prices, check out Hobby-lobby, HorizonHobby, Tower Hobbies, or plenty of other online places.
I'm planning to augment the anti-torque thing with movable motor pods.· That will give me both forward flight, and far faster rudder response in a hover.· The left/right motors will tilt fwd/back to spin in place, or all tilt forward for normal flight.
Jason
·
Jamie
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
--
Jamie C. Pole
Principal Consultant
J.C. Pole & Associates, Inc.
http://www.jcpa.com/
http://jasondorie.com/WordPress/?cat=3
Jason
·
Jason, you really should put these videos on YouTube so others can be inspired by what you are creating.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC, eProto fo SunSPOT, BitScope
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com
Love the Youtube video :-)
I am building an EPP Delta Wing and bought my gear from Hobby City. Shipped to Australia in 5 days.
You have just wet my appetite - maybe when I get this wing working (read: learn to fly) I might try something like yours. Would be a great use for my propeller too. Always wanted to play with gyros, accelerometers, etc.
Have you thought about·using 4 EDFs (fan engines)?? Thinking about something along the lines of a flying saucer (UFO).
I'll keep a look out for your updates.
http://hk.youtube.com/watch?v=Y4jtguSF0n4
http://www.microdrones.com/index.html
Those sites inspired me to build my own, but that particualr project hasn't gotten off the ground.· Perhaps when I return to the States some day and I have a real workshop to build things.· I remember doing research and found some college student projects with papers that were interesting to read.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Timothy D. Swieter, E.I.
www.brilldea.com·- Prop Blade, LED Painter, RGB LEDs, uOLED-IOC, eProto fo SunSPOT, BitScope
www.sxmicro.com - a blog·exploring the SX micro
www.tdswieter.com