

PS5 DualSense as a Robot Controller? (Force Feedback)
 Duane Degn
Posts: 10,588
Duane Degn
Posts: 10,588
I'm fascinated with force feedback controllers. One of my many back burner projects is to figure out how to use a Microsoft Sidewinder Force Feedback 2 Joystick (FF2) as a robot controller. One of the drawbacks of using the FF2 is its weight.
The new PlayStation 5 controller might be a way of having a more portable force feedback experience.

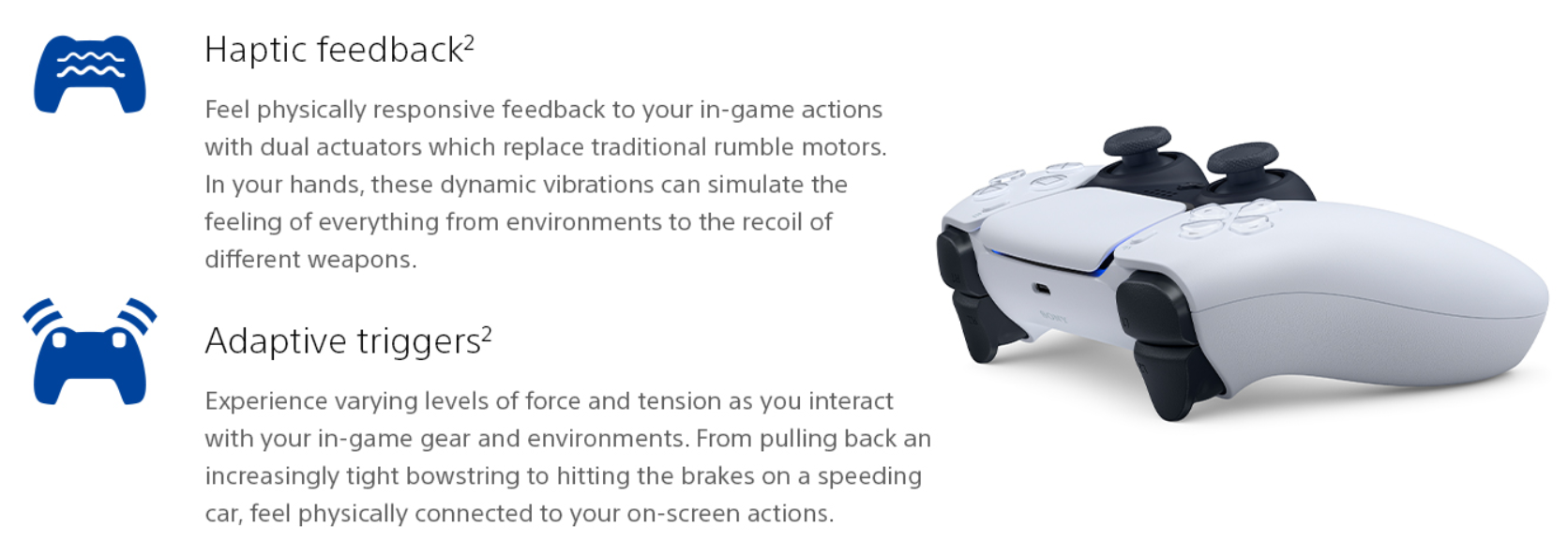
The DualSense Controller sounds very interesting. Dave Lee and Marques Brownlee were both very impressed by the controller. I find the haptic feedback and the force feedback triggers very interesting. I was pleased to learn the controller will communicate over Bluetooth to a Raspberry Pi. The feedback features aren't supported yet but I think this support will be added in the near future.
Edit: I imagine drivers for the P2 could also be developed. I'd much rather use this controller with the P2 than a Raspberry Pi.
I think this controller looks like a fantastic solution to robotics problems. I'm just having a bit of trouble figuring what problems this controller solves.
As with other force feedback devices, specialized actuators will be needed in order for the feedback to represent meaningful information.
Current sensors on motors and servos are the first sensors to come to mind. Perhaps sensing more than normal current could be a condition which activates haptic feedback?
Maybe accelerometer and gyro data could be monitored. Turbulence in flight (or a rough road) could be recognized by the robot's processor. The turbulence could be conveyed to the user using the controller.
Do any of you have ideas on how this controller could be used with robotic projects? What sort of sensors would need to be in the robot to make the feedback meaningful?
There's a cool teardown video showing the insides of the controller.
Here's the feedback mechanism on one of the triggers (from the teardown video). The trigger is upside down in this image.

I'm really interested to hear what the rest of you think about this controller and force feedback in general.
The new PlayStation 5 controller might be a way of having a more portable force feedback experience.
The DualSense Controller sounds very interesting. Dave Lee and Marques Brownlee were both very impressed by the controller. I find the haptic feedback and the force feedback triggers very interesting. I was pleased to learn the controller will communicate over Bluetooth to a Raspberry Pi. The feedback features aren't supported yet but I think this support will be added in the near future.
Edit: I imagine drivers for the P2 could also be developed. I'd much rather use this controller with the P2 than a Raspberry Pi.
I think this controller looks like a fantastic solution to robotics problems. I'm just having a bit of trouble figuring what problems this controller solves.
As with other force feedback devices, specialized actuators will be needed in order for the feedback to represent meaningful information.
Current sensors on motors and servos are the first sensors to come to mind. Perhaps sensing more than normal current could be a condition which activates haptic feedback?
Maybe accelerometer and gyro data could be monitored. Turbulence in flight (or a rough road) could be recognized by the robot's processor. The turbulence could be conveyed to the user using the controller.
Do any of you have ideas on how this controller could be used with robotic projects? What sort of sensors would need to be in the robot to make the feedback meaningful?
There's a cool teardown video showing the insides of the controller.
Here's the feedback mechanism on one of the triggers (from the teardown video). The trigger is upside down in this image.
I'm really interested to hear what the rest of you think about this controller and force feedback in general.
Comments
Agreed, feedback from a gripper could be one application.
If the trigger were used as throttle, perhaps steeper grades would require more pressure. The feedback could be based on motor current in the robot.
The various reviews of the controller mention how the controller conveys surface textures. It would be interesting to see if a robot travelling across grass, gravel asphalt could send appropriate data so the user could sense the surface conditions at the robot. I'm having trouble figuring out when this sort of data would be useful. While it might be very useful, I sure think it sounds cool to be able to "feel" the surface the robot it traversing.
I'm pretty sure basic functions of the controller will be available for PC user but I don't know how many of the controller's features Sony will make available in PC based systems.
Apparently Sony is adding DualSense support to Linux. This video describes some of the features being supported in the latest available patch.
Apparently there are plans to add some of the cool feedback features to the Linux driver. The feedback features apparently require a lot of data and the current data structures for game pads aren't sufficient to convey all this information.
It would be fantastic if all the cool feedback features available with this controller could be used with sensor information from a robot. Maybe the person controlling the robot would be able to "feel" the texture of the ground under the robot.
I haven't purchased one of these controllers myself but if Sony adds the feedback support into the Linux driver, I'll likely buy one.
Ideally, Sony would just publish the entire protocol used with the controller so anyone could use the controller with any device capable of handling all the data. I think the Propeller 2 is one of the devices capable to using all the interesting features of this controller.