

Cartographer Robot mapping algorithm

Now begins my project for the month
I am contiuing with my idea for a cartographer robot.
Last year, my robot successfully mapped a small area.
It used a ping sensor to triangulate it's position based on the distance of the walls,
and assuming the room was square, It made a virtual map.
This map was fed to the debugger via a serial cable(always attached to the robot)
for every 10cmx10cm square a 1 was shown if the robot detected an object a 0 if not.
The robot was programmed using a Basic Stamp 2.
Frankly the mapping program was not that complex, and I'd rather restart my project now that I'm more BASIC and SX/B friendly
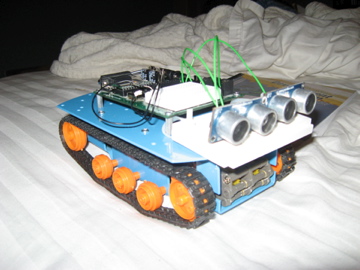
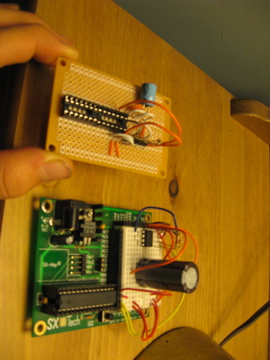
This year I am using A Rogue Robotics ATR base with a custom SX/B tech board to drive a Pololu Motor controller.
The robot will be experimented with the Basic Stamp, but After the project is complete I will turn the processor into an SX chip.
It uses a 6V power supply, and I plan on adding an accelerometer later.
So, does anyone have any Ideas for a cartographer robot mapping algorithm?
Basically the robot is open to experimentation and I am open to the most exotic ideas.
I don't know much about robotic mapping, I've researched my Mom's Roomba, and even that doesn't use that complex a program.
thanks
-Henry
I am contiuing with my idea for a cartographer robot.
Last year, my robot successfully mapped a small area.
It used a ping sensor to triangulate it's position based on the distance of the walls,
and assuming the room was square, It made a virtual map.
This map was fed to the debugger via a serial cable(always attached to the robot)
for every 10cmx10cm square a 1 was shown if the robot detected an object a 0 if not.
The robot was programmed using a Basic Stamp 2.
Frankly the mapping program was not that complex, and I'd rather restart my project now that I'm more BASIC and SX/B friendly
This year I am using A Rogue Robotics ATR base with a custom SX/B tech board to drive a Pololu Motor controller.
The robot will be experimented with the Basic Stamp, but After the project is complete I will turn the processor into an SX chip.
It uses a 6V power supply, and I plan on adding an accelerometer later.
So, does anyone have any Ideas for a cartographer robot mapping algorithm?
Basically the robot is open to experimentation and I am open to the most exotic ideas.
I don't know much about robotic mapping, I've researched my Mom's Roomba, and even that doesn't use that complex a program.
thanks
-Henry
Comments
Try this.
humanoido
Post Edited (humanoido) : 12/29/2007 12:50:03 PM GMT
I recently switched to the Propeller and I'm getting familiar with it before I dive into a mapping bot. but I'm close I just need to get my encoders working and I'll have all of the hard ware I need (I think).
in the above thread tons of people gave good ideas for something like this. as for the math involved Seattle robotics society has some info about how to do this. I'll see if I can find it and post it.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"A complex design is the sign of an inferior designer." - Jamie Hyneman, Myth Buster
DGSwaner