

Max Distance and Shielding Requirements of HB-25 Signal Lines

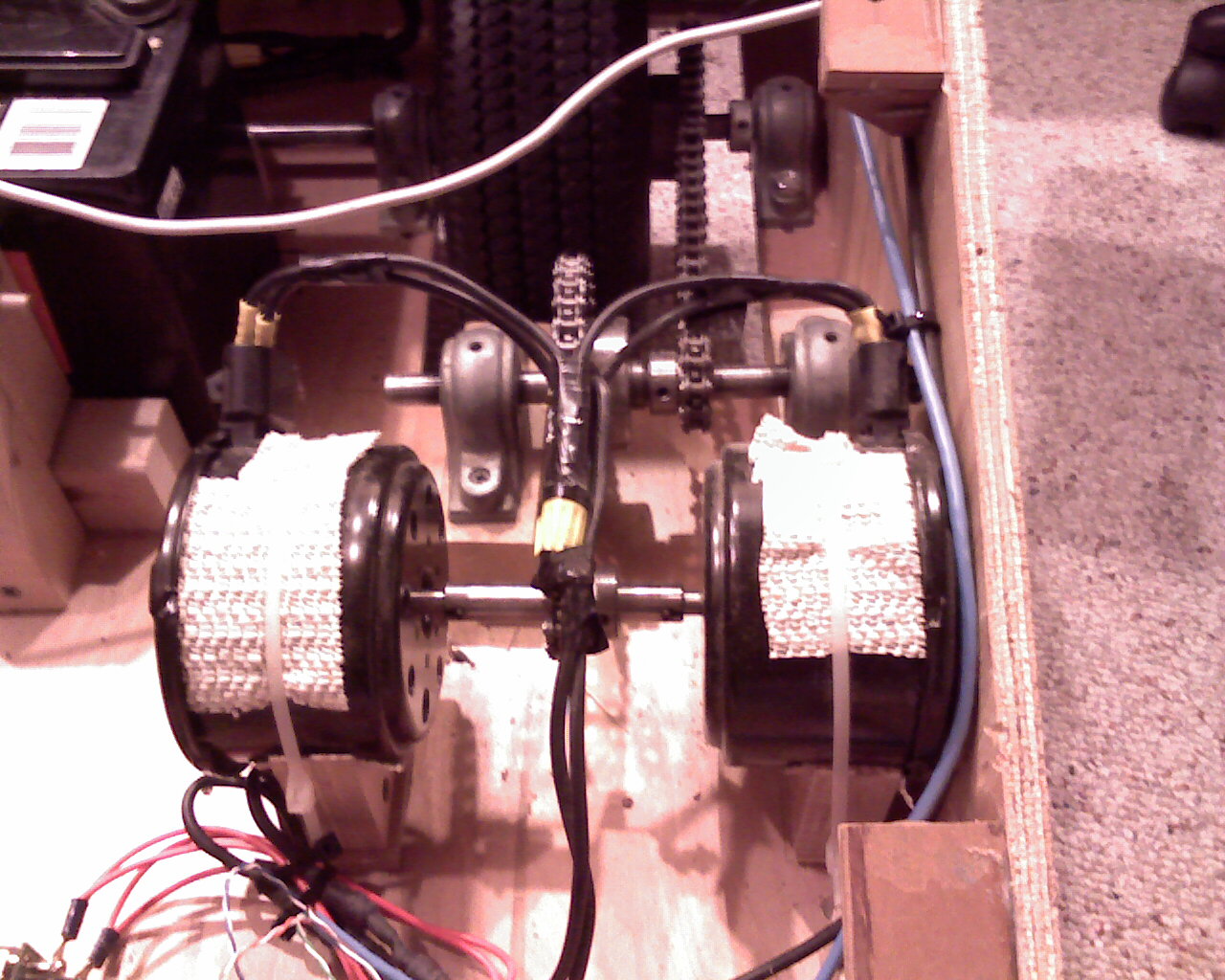
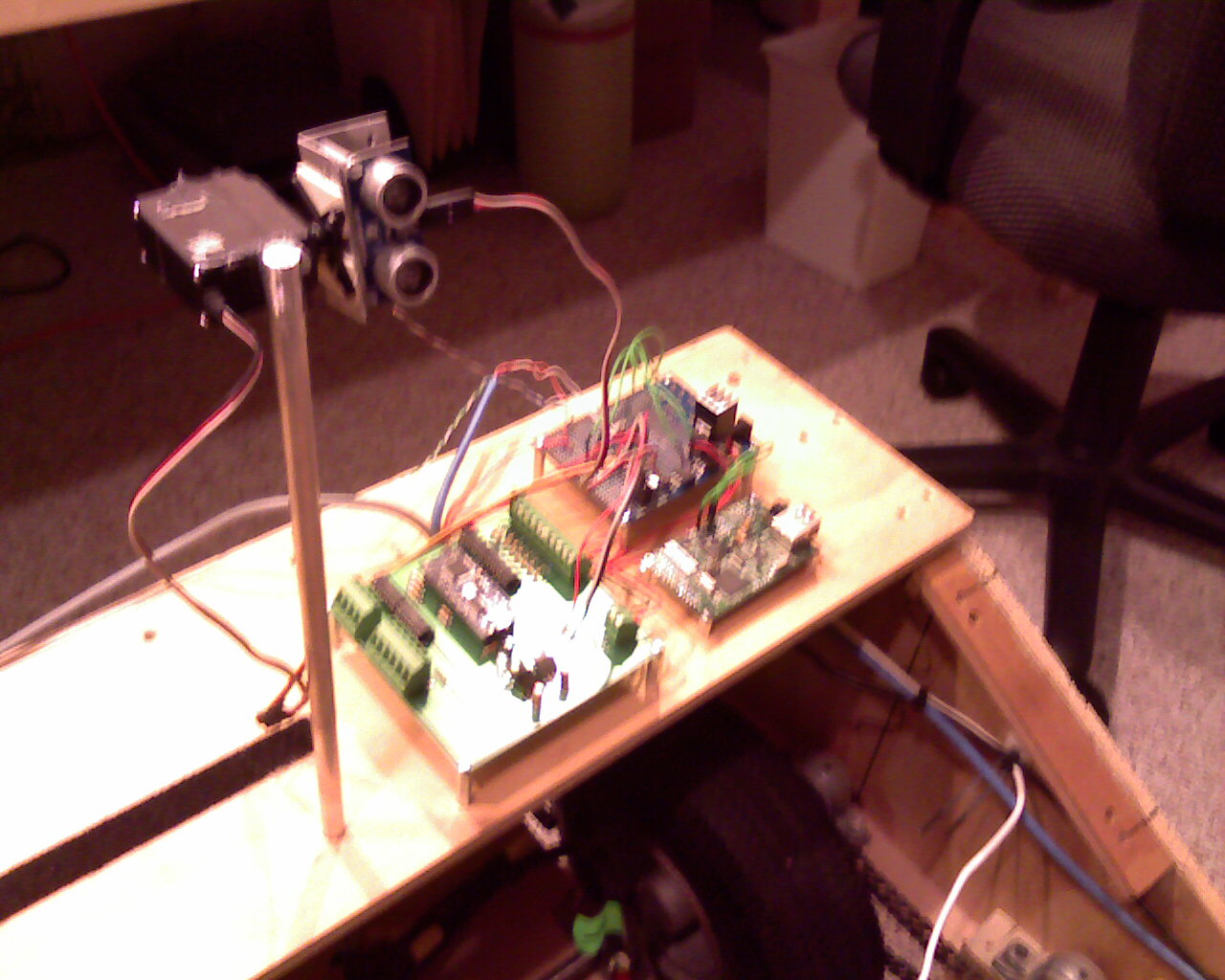
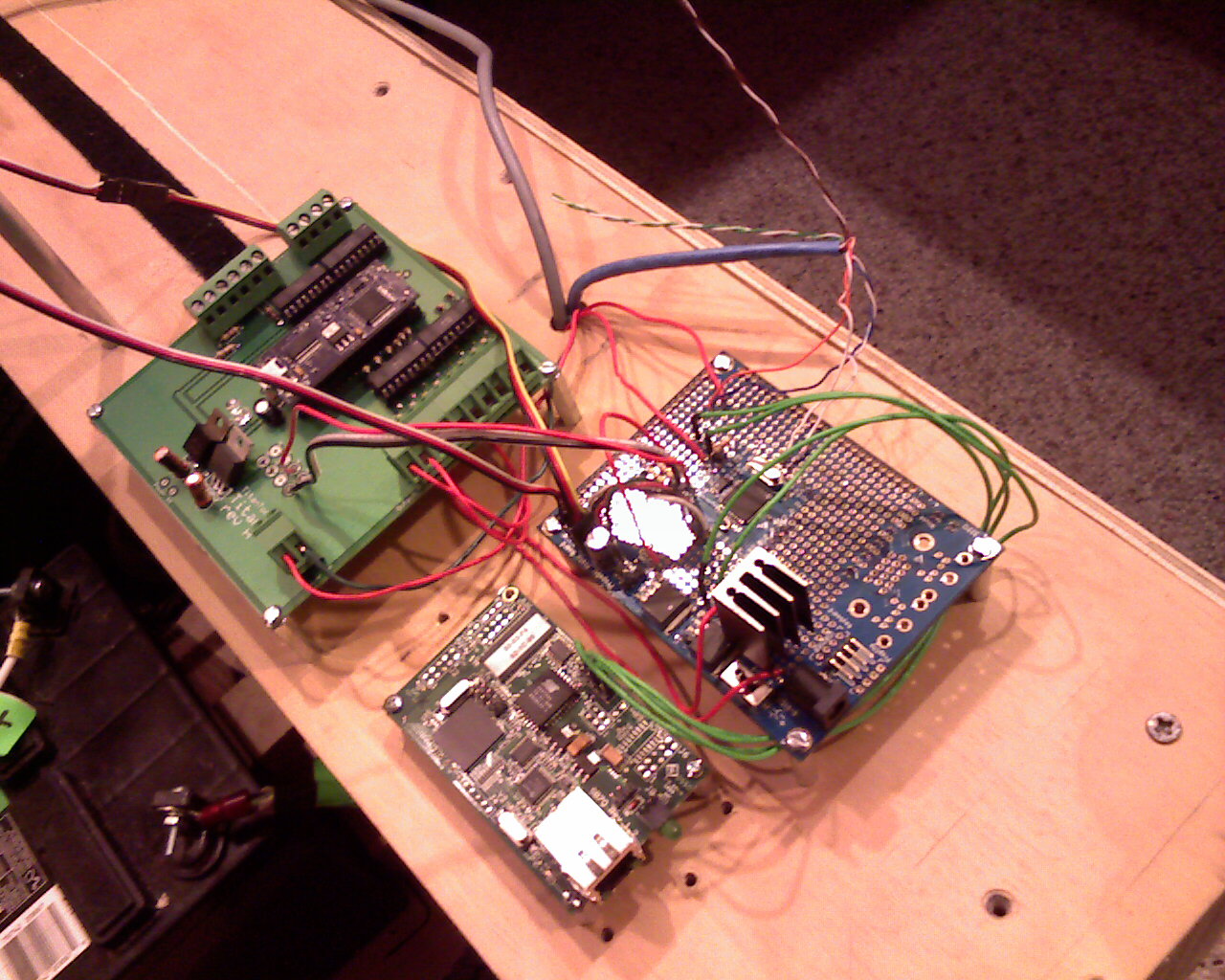
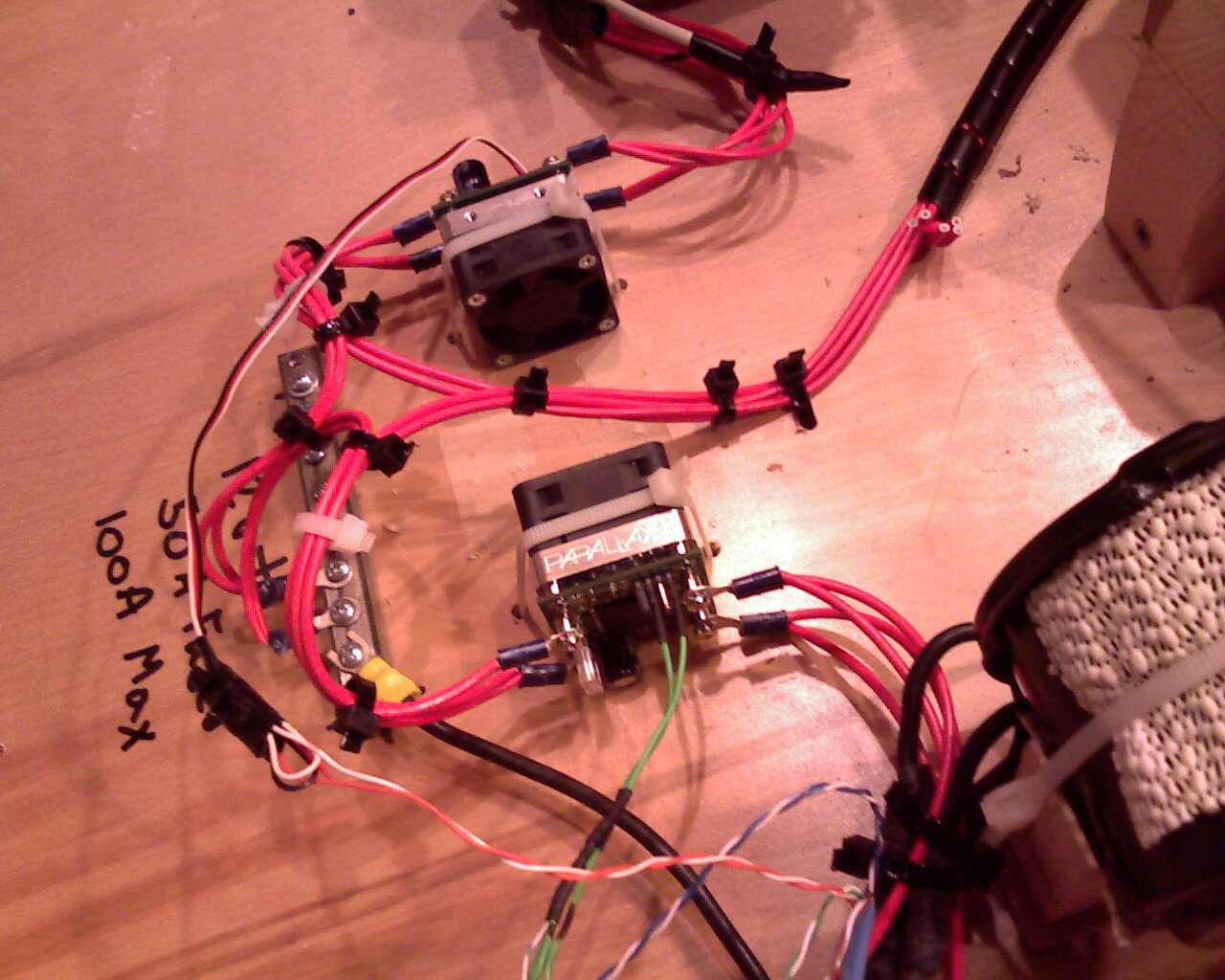
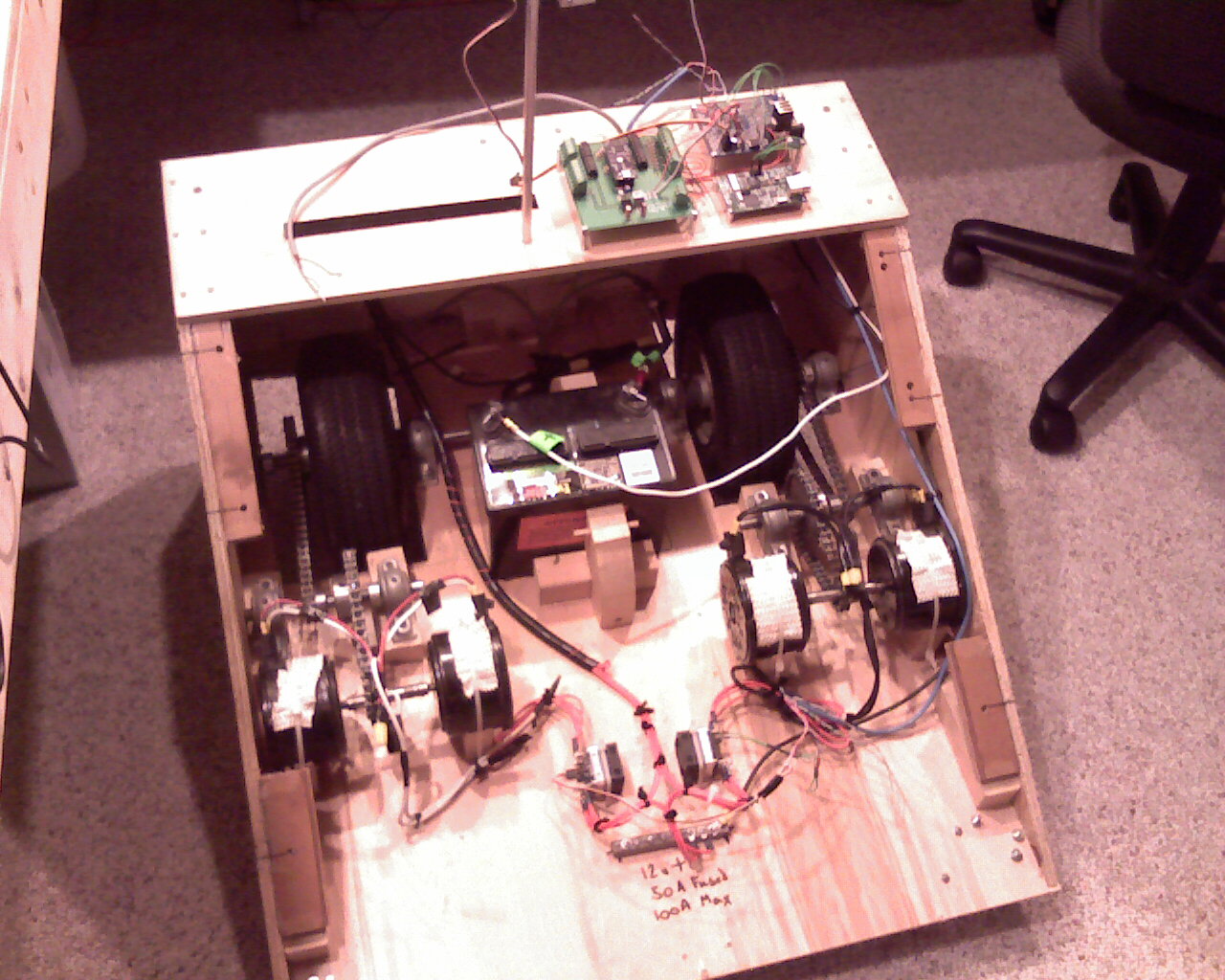
On one of my larger Robotics projects (4 x 1/3 HP drive motors), I am using HB-25s as the main motor controller. I know that the hardware is working correctly, because If I hookup an RC Car receiver to the HB-25s, everything works perfectly. However, everything seems to change when I change the pulse source to a prop. The HB-25s either don't respond at all, or they respond very sporadically. I know that the software is working, because I have tested it on a standard Servo. Therefore, I beleive that the problem may lie in the cable routing and length. I am using a CAT5E cable as the signal carrier (Orange and Blue are Ground, White with Orange Stripe is Signal 1, White with Blue Stripe is Signal 2). The cable is roughly 3 feet long, and passes next to several 12v power cables and one of the motors (You can see it Blue in one of the photos). Do you think that this is where the problem could be?
Thanks a lot,
Craig
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"... one of the main causes of the fall of the Roman Empire was that, lacking zero, they had no way to indicate successful termination of their C programs." -
"If Python is executable pseudocode, then perl is executable line noise."
"The best accelerator available for a Mac is one that causes it to go at 9.81 m/s2."
"My software never has bugs. It just develops random features."
"Windows isn't a virus, viruses do something."
"Programmers are tools for converting caffeine into code."
"Enter any 11-digit prime number to continue."
Thanks a lot,
Craig
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"... one of the main causes of the fall of the Roman Empire was that, lacking zero, they had no way to indicate successful termination of their C programs." -
"If Python is executable pseudocode, then perl is executable line noise."
"The best accelerator available for a Mac is one that causes it to go at 9.81 m/s2."
"My software never has bugs. It just develops random features."
"Windows isn't a virus, viruses do something."
"Programmers are tools for converting caffeine into code."
"Enter any 11-digit prime number to continue."
1280 x 1024 - 268K
1280 x 1024 - 205K
1280 x 1024 - 308K
1280 x 1024 - 267K
1280 x 1024 - 267K
Comments
The Prop's logic levels are 0.3V and roughly 3.0V. That's not a lot of margin in a noisy environment. The fact that you're using twisted pairs is helpful. It's important that you try to shorten the distance between the two ends, route the cable further from high current areas. You could also run the Prop output through a 3V to 5V logic converter. There are a variety of gates that would work. The 74LS244 comes to mind.
Craig
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"... one of the main causes of the fall of the Roman Empire was that, lacking zero, they had no way to indicate successful termination of their C programs." -
"If Python is executable pseudocode, then perl is executable line noise."
"The best accelerator available for a Mac is one that causes it to go at 9.81 m/s2."
"My software never has bugs. It just develops random features."
"Windows isn't a virus, viruses do something."
"Programmers are tools for converting caffeine into code."
"Enter any 11-digit prime number to continue."
Hopefully that will work,
Craig
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"... one of the main causes of the fall of the Roman Empire was that, lacking zero, they had no way to indicate successful termination of their C programs." -
"If Python is executable pseudocode, then perl is executable line noise."
"The best accelerator available for a Mac is one that causes it to go at 9.81 m/s2."
"My software never has bugs. It just develops random features."
"Windows isn't a virus, viruses do something."
"Programmers are tools for converting caffeine into code."
"Enter any 11-digit prime number to continue."