

Newer rotating feet design - Penguin - wheels

Well I started a new foot design for my much modified Penguin.
I won't have any time for a month to finish it, as this time of year I race (bicycle) in New Zealand and Aus. New Zealand is where I took the picture for my avatar. I'll be online keeping up on things here.
·
I ordered some bevel gears that were for some·unknown R/C truck differential. I made the aluminum body and the wheels on my lathe, bought the 2 brass tube sizes at a hobby store, found the o-rings in my desk. I still have to make the mounts for the Penguin, but it seems to work well in testing. The servo is modified to be a gear motor.
This is not the way I would do it if I had a milling machine. It could look a lot better, almost as if the wheel arms were claws. The reason I am trying this over my previous design is that there will be less slipping, and it will be more forgiving of uneven surfaces. Even if 3 wheels are touching the ground it will still turn accurately.
·
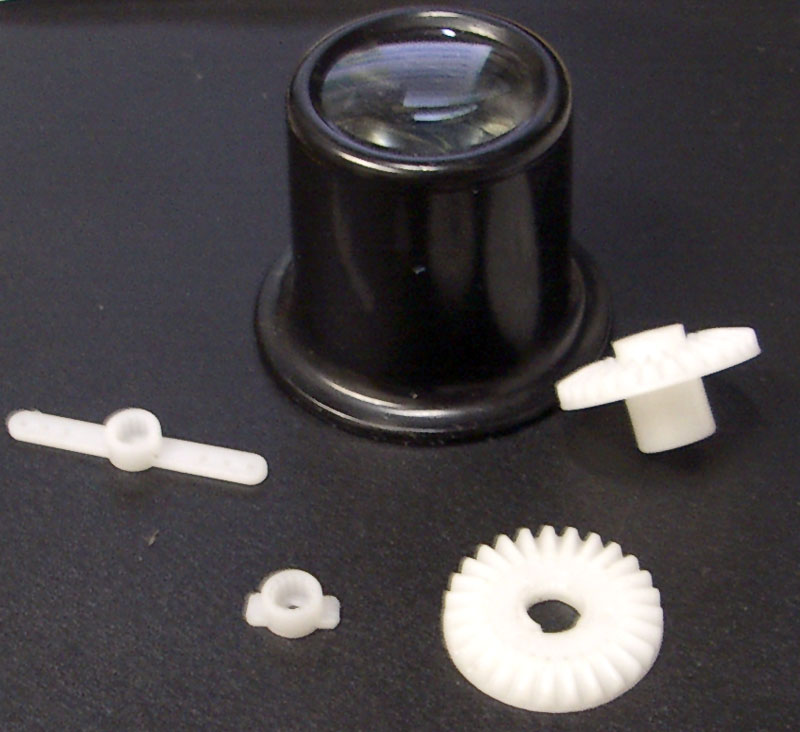
This is·the main gear. top row·shows the two pieces that I needed to merge to get the gear to fit the servo shaft. Bottom row is right before pressing together.
·
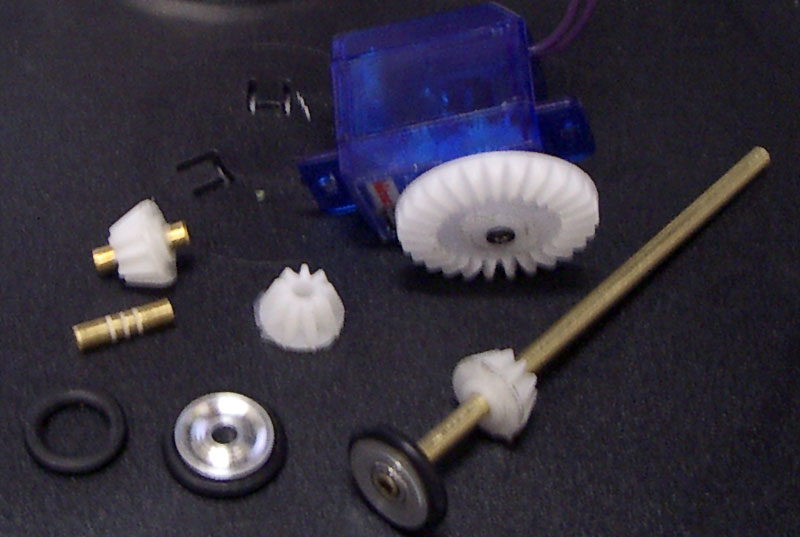
These·are the wheels I made and how the bevel gears came etc.
·
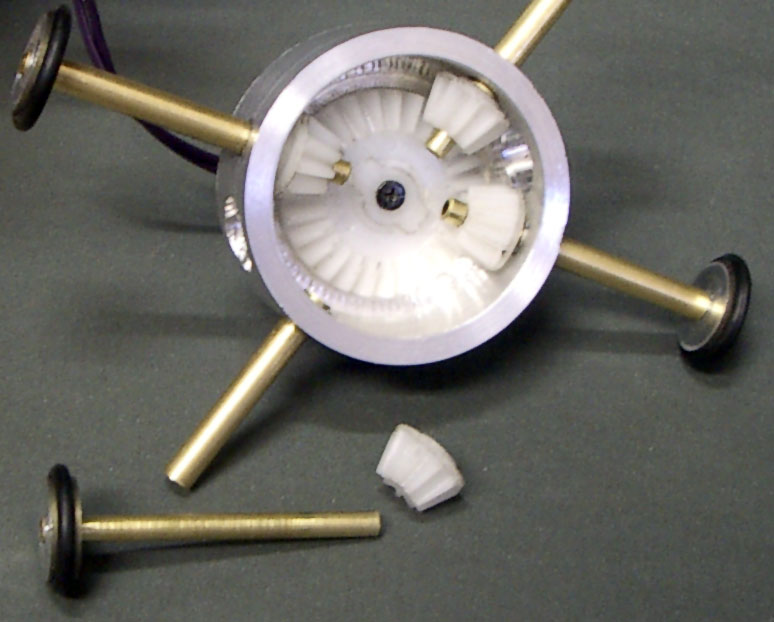
This is the bottom showing how the drive shaft fits into a tube pressed into the body.
·
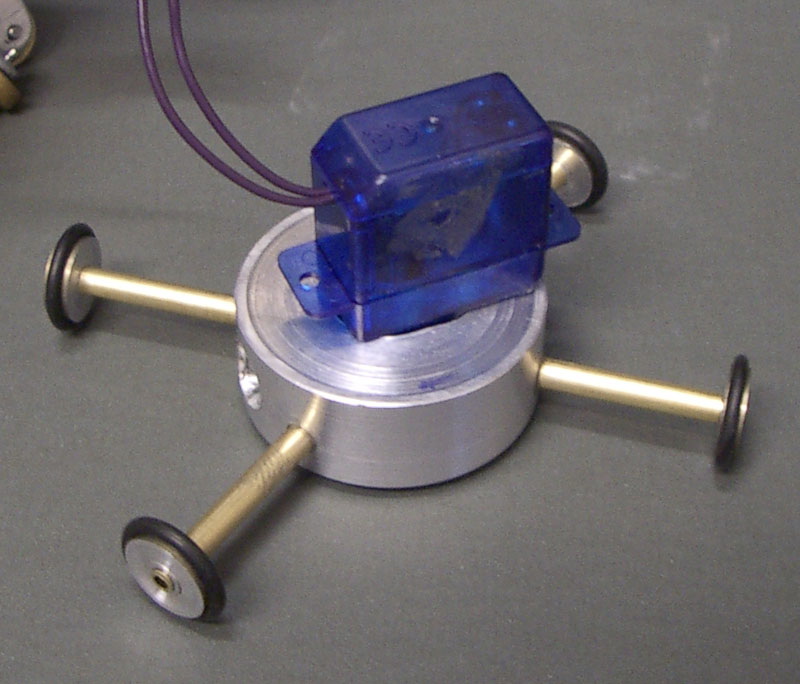
This is how far I have gotten I hope to finish when I get back.

Post Edited (Interact) : 10/26/2007 12:11:31 AM GMT
I won't have any time for a month to finish it, as this time of year I race (bicycle) in New Zealand and Aus. New Zealand is where I took the picture for my avatar. I'll be online keeping up on things here.
·
I ordered some bevel gears that were for some·unknown R/C truck differential. I made the aluminum body and the wheels on my lathe, bought the 2 brass tube sizes at a hobby store, found the o-rings in my desk. I still have to make the mounts for the Penguin, but it seems to work well in testing. The servo is modified to be a gear motor.
This is not the way I would do it if I had a milling machine. It could look a lot better, almost as if the wheel arms were claws. The reason I am trying this over my previous design is that there will be less slipping, and it will be more forgiving of uneven surfaces. Even if 3 wheels are touching the ground it will still turn accurately.
·
This is·the main gear. top row·shows the two pieces that I needed to merge to get the gear to fit the servo shaft. Bottom row is right before pressing together.
·
These·are the wheels I made and how the bevel gears came etc.
·
This is the bottom showing how the drive shaft fits into a tube pressed into the body.
·
This is how far I have gotten I hope to finish when I get back.
Post Edited (Interact) : 10/26/2007 12:11:31 AM GMT
800 x 732 - 114K
800 x 537 - 99K
800 x 684 - 116K
774 x 622 - 99K
Comments
and I can't wait to see the final results! It took a
while to understand that you are actually making
these parts yourself, i.e. machining, lathing, etc.
I wish you the best of luck bike racing! Whether
you win the bike race or not, in my eyes
your Penguin mod is already a winner!
humanoido
Ken Gracey