

Penguin uOLED sonar-sodar installed.

My penguin is really getting quite a bit more capable. I have added the uOLED display, and along with the rotating feet (from this thread) he is able to become aware of the objects and their placement in his environment.
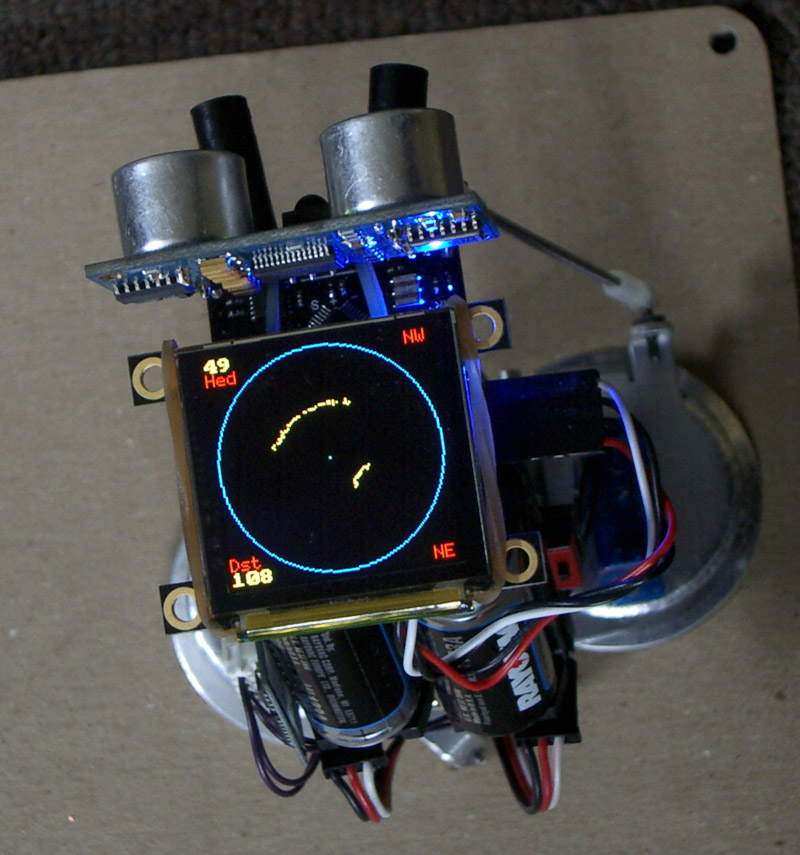
This picture is the radar (actually sodar since it’s not under water) result of him spinning on one foot with a wall on one side and a glass bottle off to another. ·As you can see the bottle is closer to the penguin than the wall. He is currently facing 49 degrees and the object directly in front of him is 108cm away.
·
·
I had to re-write the Parallax-Calibrated-compass routines so they were more optimized for variable usage and program space. The result of that work turned out to be just as accurate as the original Parallax code.
In theory the original code should be more accurate but due to the fact that the actual resolution of the HM55B is only good for 255 positions around the compass at best, my new routine came out to be of equal accuracy. The whole Compass routine including the calibration calculation only uses 2 word, and 1 byte, length variables. And the routine is just 3 lines longer than the non-calibrated routine. I will post another thread on this subject and the code.
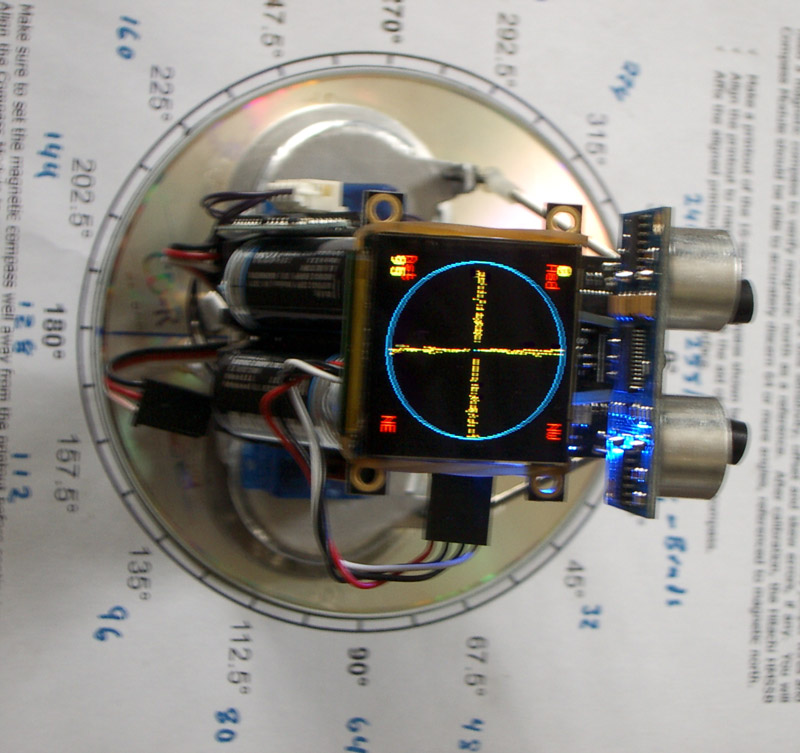
The next picture is a bit shaky, but shows the penguin taped to his calibration disc (old CD with a line drawn across the middle. I turned the penguin to the four poles and moved and object toward and away from him to look at the result from the compass and calibration calculations. Without using the compass calibration calculation the display looked more like a peace sign.
·I was really surprised that this robot still has power to support all the things I’ve added:
Ultrasonic Ping))
Polouo Motor controller.
2 additional gear motors.
The uOLED display.
·

Post Edited (Interact) : 10/15/2007 11:26:31 PM GMT
This picture is the radar (actually sodar since it’s not under water) result of him spinning on one foot with a wall on one side and a glass bottle off to another. ·As you can see the bottle is closer to the penguin than the wall. He is currently facing 49 degrees and the object directly in front of him is 108cm away.
·
·
I had to re-write the Parallax-Calibrated-compass routines so they were more optimized for variable usage and program space. The result of that work turned out to be just as accurate as the original Parallax code.
In theory the original code should be more accurate but due to the fact that the actual resolution of the HM55B is only good for 255 positions around the compass at best, my new routine came out to be of equal accuracy. The whole Compass routine including the calibration calculation only uses 2 word, and 1 byte, length variables. And the routine is just 3 lines longer than the non-calibrated routine. I will post another thread on this subject and the code.
The next picture is a bit shaky, but shows the penguin taped to his calibration disc (old CD with a line drawn across the middle. I turned the penguin to the four poles and moved and object toward and away from him to look at the result from the compass and calibration calculations. Without using the compass calibration calculation the display looked more like a peace sign.
·I was really surprised that this robot still has power to support all the things I’ve added:
Ultrasonic Ping))
Polouo Motor controller.
2 additional gear motors.
The uOLED display.
·
Post Edited (Interact) : 10/15/2007 11:26:31 PM GMT
800 x 855 - 191K
800 x 753 - 165K
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Carl
display with PING))) to make a SODAR on
Penguin robot. Your work is exceptional and
your programming is a remarkable accomplishment.
I'm really glad you're here in the forum to share
these very exciting mods.
humanoido
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Tech Support