

Track Bot with Ping

Hi all,
First of all I would like to thank all the forumers for being very helpfull. I have started with this robotic hobby a year ago and this is the result. It's not really big deal for you guys with lot of experience but at least something for me with zero knowledge in robotics.
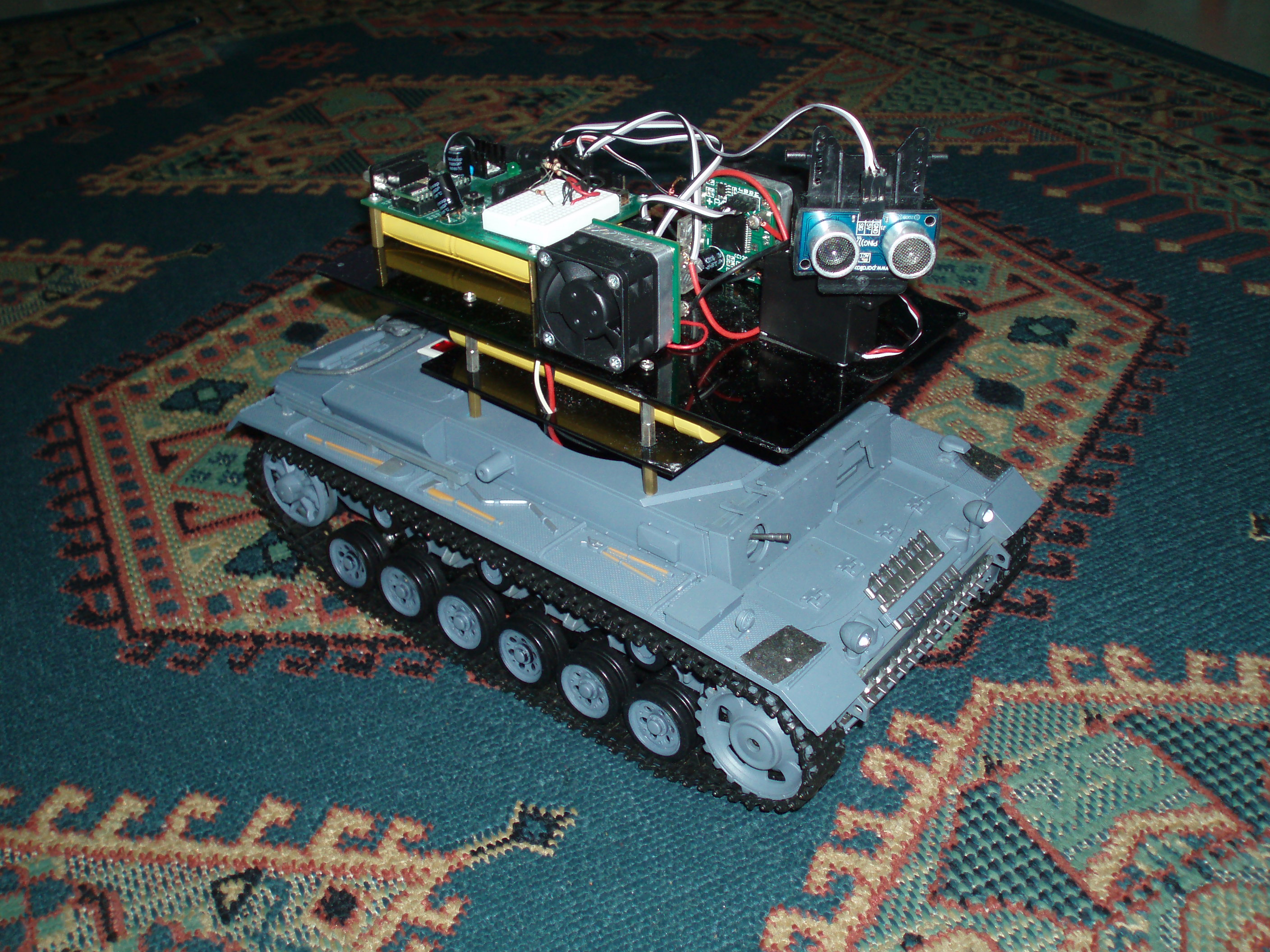
This is a simple autonomous·robot that use Toy Tank for the base. I used 2 HB25 for the motor controler and Ping·sensor. In future I will add IR sensor for edge detector.
Any idea and proposal to improve this robot are welcome.
Thanks to·Parallax for their great support.
Sorry for my not so good English.
First of all I would like to thank all the forumers for being very helpfull. I have started with this robotic hobby a year ago and this is the result. It's not really big deal for you guys with lot of experience but at least something for me with zero knowledge in robotics.
This is a simple autonomous·robot that use Toy Tank for the base. I used 2 HB25 for the motor controler and Ping·sensor. In future I will add IR sensor for edge detector.
Any idea and proposal to improve this robot are welcome.
Thanks to·Parallax for their great support.
Sorry for my not so good English.
2816 x 2112 - 1M
Comments
How about incorporating PID (see http://forums.parallax.com/showthread.php?p=529609) to make the tank move smoothly?
Looks great! Check out this video of Boe-Bot Tank with Memsic Accelerometer. This would keep your bot from trying to climb something too steep.
http://www.parallax.com/dl/mm/video/boebot/TankMemsic.WMV
Super project. Good luck.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Never give up when things go wrong.
I noticed you are using HB25s.· My question is what do they control?· What kind of motor are you using?
I am using the HB25 to control the left and right track motor. Each motor are control independently by one HB25.I use the same motor that come with the tank. The motor is powered with 7.2v rechargeable battery. To make it last longer i paralleled 2 of it.
Gee. Your implementation is almost precisely what I am building; tracked vehicle, two HB25s, two 7.2v rechargeable batteries. I will also use a dedicated Stamp to control each HB25. Each of these "slave" Stamps will communicate with a "master" that provides them with exactly three instructions: forward, reverse, and speed. ("Stop" will be either forward or reverse with "0" speed.)
Did you use one Stamp or multiple Stamps?
I love your tank!
Your English is perfect.
--Bill
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You are what you write.
Bill,
Maybe I'm talking out of turn here, but why not use 1 stamp with a PSC that could control the 2 HB25's. If the HB25 is controlled like a servo, then the PSC could easily control them. It'd save you money over using 3 stamps on one project, plus programming, etc.
Just a suggestion.
Tony
You are 100% correct (in my opinion with my limited expertise) and that is the way I would have done it if I did not want to learn something else in the process. I am fascinated with the idea of interconnecting Stamps. I hesitate to call what I want to do "networking", because I intend to simply use a bit-signaling scheme between the "master" Stamp and two "slave" stamps. I will need five pins to do this per slave. (Ten on the master, of course.)
In my mind, this bit-signaling will be far faster than using SEROUT/SERIN between master and slaves. And, it will be very limited, as well. All I want to do is tell a slave to instruct an HB-25 to run the motor forward, reverse, or stop. The master will also send the slaves "speed" instructions. These instructions will require four pins (bits).
So, I intend to use a total of five pins per slave in the following manner: one pin for forward or reverse (stop will be either forward or reverse coupled with a speed of zero) and four pins to provide a selection of 15 speeds (or 16, if you include stop).
It is easy to see that I am taking a hardware intensive approach that makes little sense financially or even from the point of view of reducing execution overhead. (As you say, the HB-25 makes life easy even for a BS2!) But, I hope to learn something and produce a thing that works well. After that is done, I may reconfigure as you suggest.
Additionally, as I expand the first scheme--gotta have sensors!--I will immediately run out of pins on the master BS2. Therefore, I intend to replace the master BS2 with a breadboarded BS2p40 and add a dedicated BS2 to handle sensors (the former-master, probably). Not only will the BS2p40 give me 32 I/O pins, but I think it is about three times faster than a BS2.
So, imagine a large breadboard with three or four BS2 MODULES on it and a single BS2p40 sending instructions to all of them and receiving feedback from each of them, in turn. As the original concept expands, the fact that it started off as a hardware-intensive project becomes a big advantage instead of a rather expensive (relatively speaking) mistake.
Either that or I will have a lot of parts to play with! [noparse]:)[/noparse]
Don't touch that dial! I will post pictures of my progress, triumps, and failures. Here is a link to the chassis I finished about a week ago . . . http://www.billnkc.com/images/Robotics/Crawler/9-12-07%20Frame-g.jpg. I will post an updated picture somewhere when I put the motors in, which SHOULD be this week.
--Bill
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You are what you write.
I wish I could have more time for my robotic hobby. I am a bit envy with what you did for the cahsis. How long did u put yourf effort for that.
I want to do more with my track bot but with very limited time that i have i think it will take another six to twelve month to really complete it.
Bill why u need a lot of I/O for your bot? May I know what's in your head?
Azmi.
Thank you for the compliment!
It took me me a few weeks in my little shop to build it. Most of that time was spent waiting on parts. And, since I am not even CLOSE to being a machinst, I had some re-work to do on some of the parts I built! The bearing blocks were the hardest. (Those are the square-looking aluminum blocks you see in the picture. Each one bolts on to the frame members and has two bearings in it to hold the axle on which the timing belt pulleys mount.)
I do not need a lot of I/O for my project as I envision it. The I/O is just a bonus that I get from the way I am using the Stamps. I will use less than 8 pins on the two slave stamps and probably less than 24 pins on the Bs2p40 that will·become the master.
Later, when I add sensors, I will also add a Stamp to handle them. This "sensor slave" will communicate with the master in the same manner as the drive motor slaves. So, the master really needs a lot of I/O pins, but the slaves do not.
--Bill
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You are what you write.