

Probe boe-bot and a work in progress a r2d2 boe-bot
 walice_drel
Posts: 81
walice_drel
Posts: 81
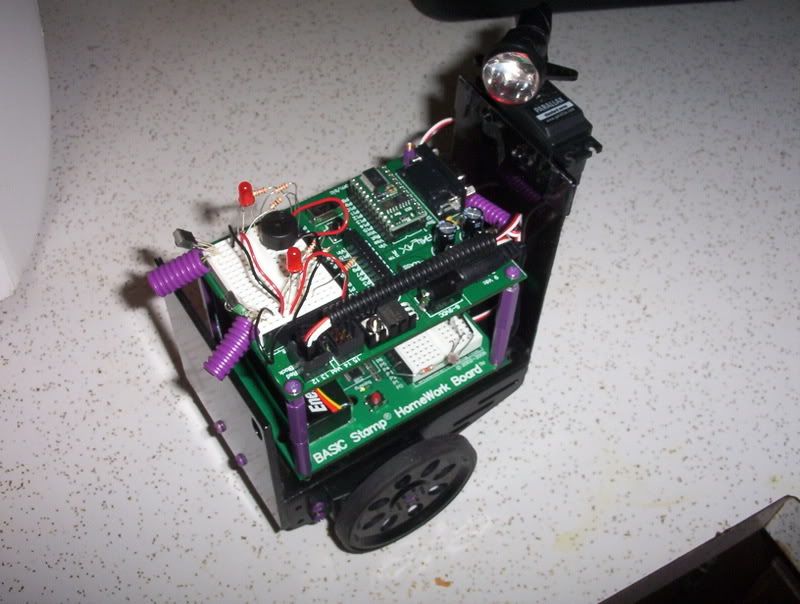
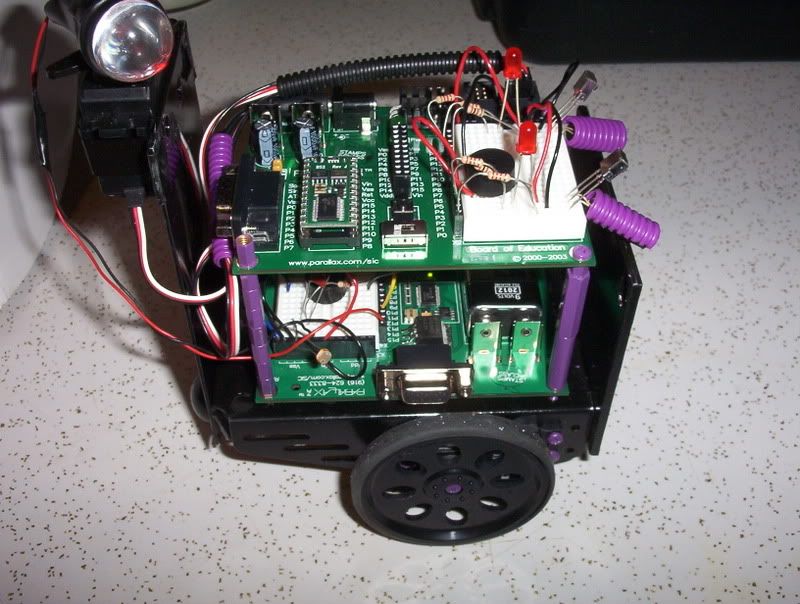
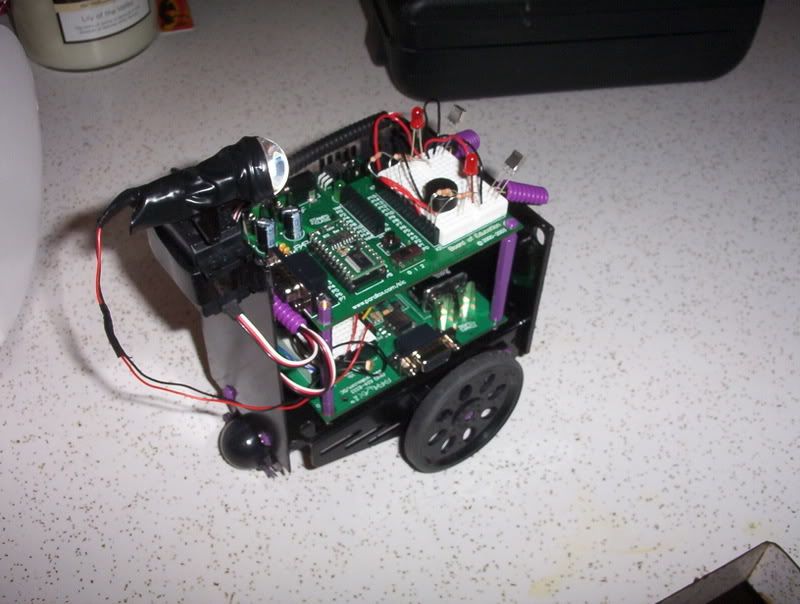
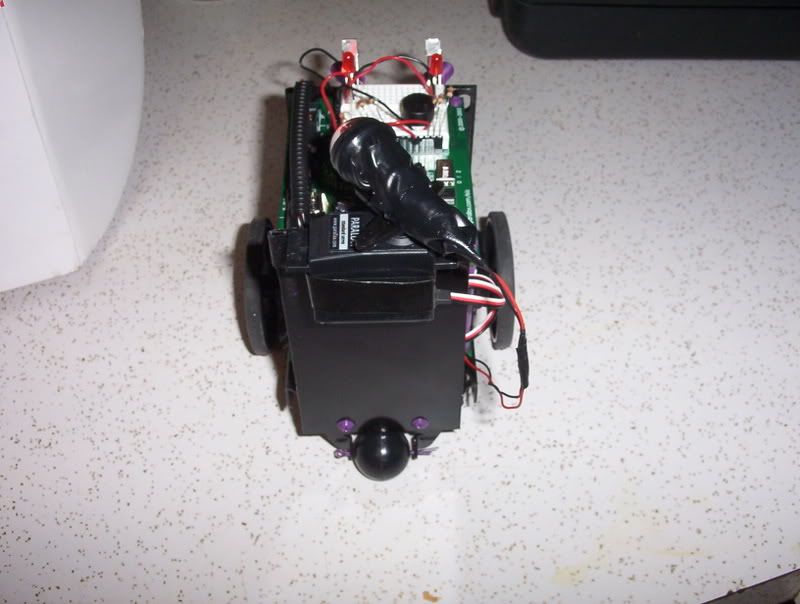
Here are some pics of my probe Boe-Bot and some pics of my soon to be completed r2d2 boe bot.


Comments
I see that you have some vex parts on your r2d2 bot. What kind of pulse do the servos/"motors" take? A standard 1 to 2ms pulse? Thanks
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
The boe-bot is a robot I made for my daughter. I just thought it looked really cool..lol It roams with ir and shines its red beam in the darkest areas of the room while it roams, and scares away the boogie man for her...lol
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔