

Viewport v1.0- Get Inside the Propeller! EDIT: This Thread describes an OLD ver
 Hanno
Posts: 1,130
Hanno
Posts: 1,130
WARNING:
THIS THREAD DESCRIBES VERSION V1.0 OF VIEWPORT- NEWEST VERSION IS AVAILABLE HERE:
mydancebot.com
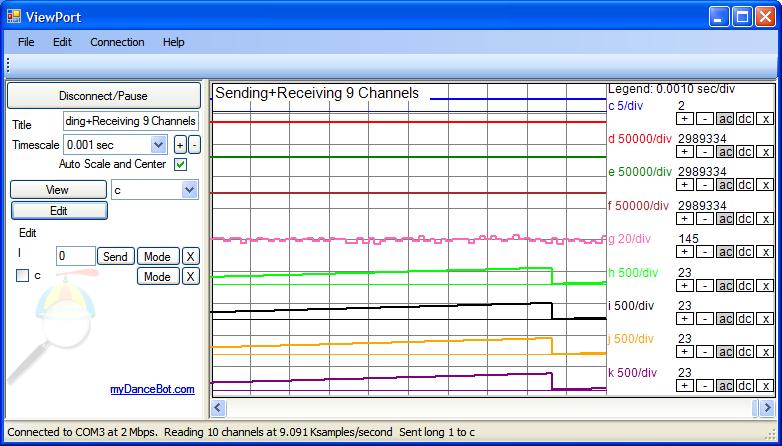
Viewport is a program that let's you view and change variables in your Propeller application in real time.
Viewport shows you the current state and graphs archived data for later analysis. A one line change to your Propeller program enables Viewport to access your variables and give you a user friendly interface to change variables as the program runs- all with no performance impact since it's running entirely in its own cog.
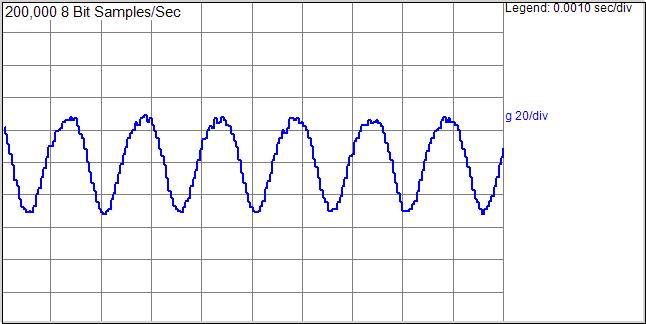
The Viewport Conduit object is coded entirely in assembly to provide a record 2mbps transmit and receive connection- which you can use any way you want. If you're interested in observing quick events you can sample a byte variable 200,000 times per second. Or you can include every variable in your program for detailed analysis.
Viewport is modeled after a digital oscilloscope and lets you manipulate the data as you want. Graphed data can be copied as an image to the clipboard from where they can be shared in email or office applications. Data can also be saved in standard WAV files.
Viewport was developed to build affordable balancing robots "mydancebot", available later this year. Viewport is free for hobbyist using it for personal projects, other licenses will follow shortly.
Please visit http://mydancebot.com/products/viewport/10 for more information, help and to download the installer.[noparse][[/noparse]url]
Post Edited (Hanno) : 9/4/2007 7:54:59 PM GMT
THIS THREAD DESCRIBES VERSION V1.0 OF VIEWPORT- NEWEST VERSION IS AVAILABLE HERE:
mydancebot.com
Viewport is a program that let's you view and change variables in your Propeller application in real time.
Viewport shows you the current state and graphs archived data for later analysis. A one line change to your Propeller program enables Viewport to access your variables and give you a user friendly interface to change variables as the program runs- all with no performance impact since it's running entirely in its own cog.
The Viewport Conduit object is coded entirely in assembly to provide a record 2mbps transmit and receive connection- which you can use any way you want. If you're interested in observing quick events you can sample a byte variable 200,000 times per second. Or you can include every variable in your program for detailed analysis.
Viewport is modeled after a digital oscilloscope and lets you manipulate the data as you want. Graphed data can be copied as an image to the clipboard from where they can be shared in email or office applications. Data can also be saved in standard WAV files.
Viewport was developed to build affordable balancing robots "mydancebot", available later this year. Viewport is free for hobbyist using it for personal projects, other licenses will follow shortly.
Please visit http://mydancebot.com/products/viewport/10 for more information, help and to download the installer.[noparse][[/noparse]url]
Post Edited (Hanno) : 9/4/2007 7:54:59 PM GMT
646 x 324 - 32K
782 x 446 - 80K
Comments
cheers & thx for the great job! -Scott
ps I'm just new to the Prop, got my Protoboard last Friday
Jim
Graham
Two questions:
1. Will the "Digital Dreamkit" display variables as numeric/hex/ASCII instead of graphed? I haven't had a chance to check, so it may do this already.
2. Will mydancebot use wheels or legs?
Currently variables are graphed, and their value is displayed as numeric. In a future Viewport, you will have the option to display as hex, ascii, and binary- as well as graph the individual bits as in a logic state analyzer. Also, right now you can change variables by sending either a numeric byte or long to the Propeller- by clicking a checkbox (0/1) or typing the value in a textbox. This will also be improved to allow entry by scrollbar, as well as binary, ascii and hex.
The first generation mydancebot will use wheels...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
http://forums.parallax.com/showthread.php?p=650217
meow, i have my own topic now? (sorta)
Looks great.
I installed all the software and verified it running.
Time for a test drive !
rob7
I like the general concept very much.
Graham
Viewport reads data from the Propeller into a buffer at 2mbps- this buffer is initially set to 10MB to support computers with limited memory. If you set the timescale high enough- ie 2sec/div then it won't have enough data in it's buffer to graph all the way across the screen- no matter how long you run it.
Luckily, you can configure the size of the buffer in the "Communications" menu. Give it a try! Of course if you set the timescale high enough, the trace may take some time to cover the screen.
I believe the "locking up" is related to how Viewport shares the COM port with other applications. Since only one program can use the COM port at a time, we made the decision to only connect to the propeller when Viewport is the active window. So, if you Alt-Tab, or click on the Parallax Propeller IDE, then Viewport will release the COM port automatically and let you reprogram the propeller. When the Viewport window becomes active again (you click on it), Viewport will reopen the COM port, detect if configuration changes were made, and then continue graphing your data. This may sound confusing, but is very useful when making changes to your Propeller Application- you don't have to worry about connecting/disconnecting- it just works.
One additional note to timescale: Since measurements are digital, with no noise or jitter, the graph of a periodic waveform may appear the same at specific timescales. This is caused by sampling the data at periodic timeintervals- the same effect why coachwheels in movies appear to stop or run backwards.
The easiest way to diagnose Viewport problems is to look at a screenshot- so, if you're uncertain about something then please share a screenshot or pm us and we'll get to it right away!
Graham
But only
_clkmode = xtal1 + pll16x
_xinfreq = 5_000_000
My Prop spin On !!
_clkmode = xtal1 + pll8x
_xinfreq = 14_318_180
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Sapieha
Wow- do you really have your Propeller clocked with 14Mhz? Is it stable when using the pll16x setting? Could we use this to increase the measurement rate? Ie, if it stably runs at 14*8= 112Mhz- then Viewport could take samples at 112Mhz!
One thing: Please repost under the current Viewport thread- this talks about v1.0- released in May- I would prefer not confuse people with old versions.
http://forums.parallax.com/forums/default.aspx?f=25&m=209676
Hanno
ATTENTION:
THIS IS AN OLD THREAD DISCUSSING AN OUTDATED VERSION OF VIEWPORT. PLEASE VISIT: mydancebot.com FOR THE LATEST