

Beacon-based Robot Navigation System

I have recently completed work on an infrared beacon system for robot navigation. Using a scanning IR detector a robot can lock on and navigate toward a beacon. Once at the beacon the robot turns and navigates to the next beacon. By using multiple beacons you can mark out any path you desire. The robot can reliably traverse this path over and over again very much like a night watchman would make his rounds.
·
The beacons are simple 38 kHz IR LED emitters. If you don’t want to build your own beacons you can reuse iRobot Roomba Virtual Walls as beacons.
·
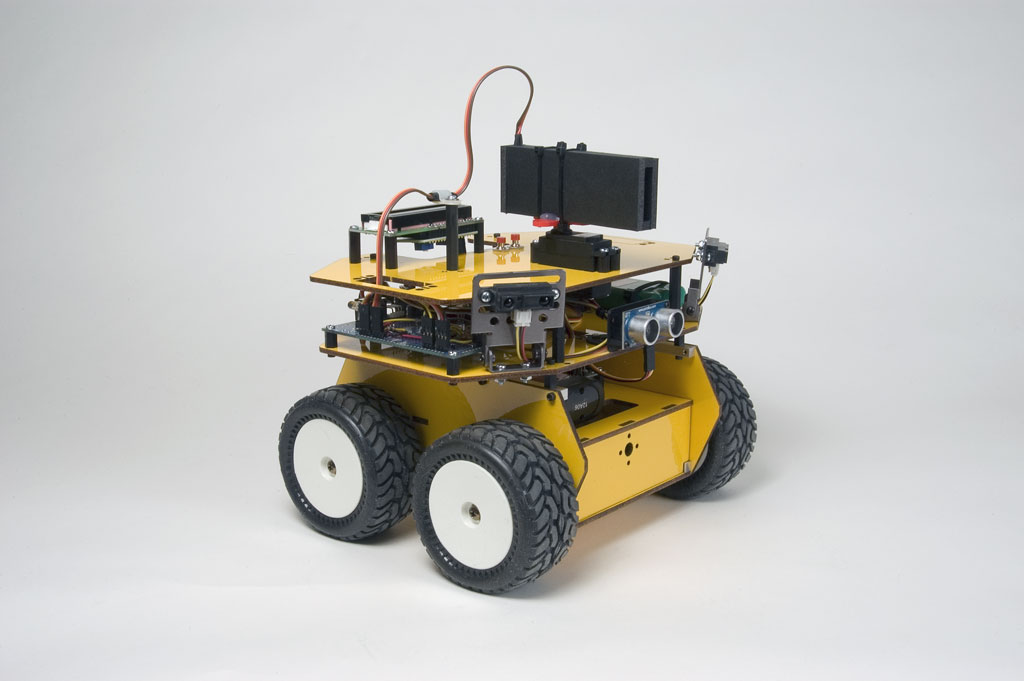
Located on the robot is a simple IR detector (PNA4602) mounted on a servo. The detector is enclosed in a narrow tube that makes it very directional. By scanning left to right with the servo the bearing to the beacon can be accurately determined.
·
The brain of this beacon system is the Propeller chip. All my robots now use the Propeller chip. The system is implemented with the following reusable objects:
·
ADF – Automatic Direction Finder. Uses the servo and IR Detector to locate and provide a bearing to the beacon.
·
Pinger – Uses a Ping ultrasonic sensor to determine the distance to the beacon and also avoid bumping into things.
·
BeaconNav – The top level object that implements the navigation mission using the above objects.
·
I've implemented this technology on several of my robots including a CrustCrawler QuadCrawler and a Lynxmotion 4WD1 rover.
·
I’ve posted a couple of videos you can watch on YouTube.
·
4WD1 - http://www.youtube.com/watch?v=UVbyeScchz4
·
QuadCrawler - http://www.youtube.com/watch?v=dC6GwUswtOI
·
I will publish more details including source code, schematics, etc. to my personal web site in the next week at http://www.norrislabs.com.
·
·
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You can’t mix matter and antimatter cold!
Steve Norris
Post Edited (norris56) : 4/20/2007 11:45:02 AM GMT
·
The beacons are simple 38 kHz IR LED emitters. If you don’t want to build your own beacons you can reuse iRobot Roomba Virtual Walls as beacons.
·
Located on the robot is a simple IR detector (PNA4602) mounted on a servo. The detector is enclosed in a narrow tube that makes it very directional. By scanning left to right with the servo the bearing to the beacon can be accurately determined.
·
The brain of this beacon system is the Propeller chip. All my robots now use the Propeller chip. The system is implemented with the following reusable objects:
·
ADF – Automatic Direction Finder. Uses the servo and IR Detector to locate and provide a bearing to the beacon.
·
Pinger – Uses a Ping ultrasonic sensor to determine the distance to the beacon and also avoid bumping into things.
·
BeaconNav – The top level object that implements the navigation mission using the above objects.
·
I've implemented this technology on several of my robots including a CrustCrawler QuadCrawler and a Lynxmotion 4WD1 rover.
·
I’ve posted a couple of videos you can watch on YouTube.
·
4WD1 - http://www.youtube.com/watch?v=UVbyeScchz4
·
QuadCrawler - http://www.youtube.com/watch?v=dC6GwUswtOI
·
I will publish more details including source code, schematics, etc. to my personal web site in the next week at http://www.norrislabs.com.
·
·
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You can’t mix matter and antimatter cold!
Steve Norris
Post Edited (norris56) : 4/20/2007 11:45:02 AM GMT

1024 x 681 - 67K
1024 x 681 - 61K
{kind=link}
1024 x 681 - 28K
{kind=link}
1024 x 681 - 29K
Comments
Very nice! I was just reading about your other robot in this months Robot Magazine (page 46?) and here you have two more very nice creations! Congrats on really showing off the fusion of various platforms and sensors and making it so smooth.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Tech Support
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Programming today is a race between software engineers striving to build bigger and better idiot-proof programs, and the Universe trying to produce bigger and better idiots. So far, the Universe is winning.
Microsoft: "You've got questions. We've got dancing paper clips."
I can't wait to read all about it on your website.
Can I bother to ask you to let me know when the information is up there so I don't miss it? This olde brain doesn't remember so good anymore.
Regards and gratsi,
Joss
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You can’t mix matter and antimatter cold!
Steve Norris
I'm looking forward to seeing the details.
Regards,
Joss
http://www.botmag.com/issue8/
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You can’t mix matter and antimatter cold!
Steve Norris
If the IR light from the LEDs is omnidirectional, and the IR sensors are digital, how do you narrow down the location of the beacon? How can you tell that the IR light gets stronger or weaker?
The robot uses a Ping to determine the distance to the beacon and does not need to measure the signal strength.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You can’t mix matter and antimatter cold!
Steve Norris
1. you seem to get a really good range from your beacons, when your bot reaches one beacon does it actually see the other beacon at that distance or just know to head in that direction, until it locks on to the beacon?
2. your video shows your bot already seeing a beacon can your bot be placed in a room and then find the beacon and navigate to it?
3. can your bots tell which beacon it is looking at? are you sending a message like a remote control or does it lock on to a 38Mhz IR signal.
I'm sure if I was up on my Spin code I could answer these my self, but alas I'm not.
Thanks
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
A complex design is the sign of an inferior designer. - Jamie Hyneman, Myth Buster
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
1. The robot centers the IR detector forward and then turns away from the current beacon and starts to look for the next beacon. You can select the direction of this turn (CW or CCW) in a pre-defined route table or you can use the default of CW.
2. Yes, it searches for the beacon (using the above algorithm) if it does not initially see it.
3. The beacons are modulated at 38 khz and pulsed at 1 khz. This is to be compatible with the Roomba Virtual Walls. You could encode the ID of the beacon by changing the pulse rate. I have experimented with this but have not formally implemented it.
Hope this helps.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You can’t mix matter and antimatter cold!
Steve Norris
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You can’t mix matter and antimatter cold!
Steve Norris
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
You can’t mix matter and antimatter cold!
Steve Norris
I just completed putting together Steve's Night Watchbot (http://www.botmag.com/issue8/) based on a Create chassis that I had originally earmarked for another project.
The robot project went together pretty smoothly except for a few minor problems that were easily overcome.
The robot performs to expectations and the PC GUI that Steve has created to control the Watchbot remotely by Bluetooth works fine.
I higly recommend the Night Watchbot project to anyone with intermediate to high level robotic skills that wants to add to the security of their home.
Regards,
TCIII
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
If you are going to send·a Robot·to save the world, you·better make sure it likes it the way it is!
i dont see schematics for beacon dual , i love that ,very nice project
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Steve Norris
www.norrislabs.com