

Propeller BOE-BOT
 Mike Green
Posts: 23,101
Mike Green
Posts: 23,101
In other threads, I've mentioned about mounting an SD card breakout board and some other things on a protoboard. Attached is a photo of the setup. The SD card breakout board is partially covered by the xBee proto board. You can see the 20K pullups mounted on the back of the breakout board which is connected to Propeller pins 8-11. The resistors mounted vertically at pins 12-15 are for a video output. The xBee Rx/Tx are connected to pins 6-7. The servo connectors are for the two BOE-BOT wheel servos and a PING bracket servo. The extra header pins are intended for the PING, IR LEDs, and an IR detector. The 2-pin header by the 5V regulator is the video output.
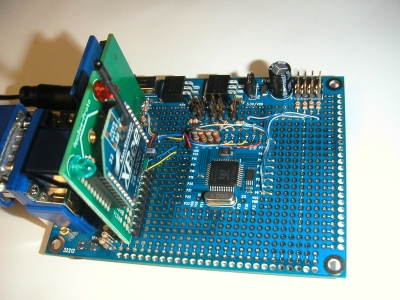
400 x 300 - 125K
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
NerdMaster
For
Life
It's allways a joy to see your projects : -)
PS , I sure would think you would want GPS (hint,hint)
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Thank's Brian
www.truckwiz.com
·"Imagination is more important than knowledge..." ·· Albert Einstein
Post Edited (Brian Beckius) : 3/21/2007 4:36:41 AM GMT
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Thank's Brian
www.truckwiz.com
·"Imagination is more important than knowledge..." ·· Albert Einstein
Post Edited (Brian Beckius) : 3/23/2007 11:20:53 AM GMT
You have the AppBee-SIP which is designed for use with 5V logic devices. It has a built-in 3.3V regulator and a 74LVC244 buffer which can take inputs from 3.3V or 5V logic. The board in the pictures is the AppBee-Proto which has neither the regulator nor the buffer and uses a 3.3V supply and logic. There's also an AppBee-SIP-LV which is essentially the same with a smaller header (only 6 pins). You can use what you have, just be sure to power it from the 5V supply and allow for the slightly greater height and width.
I've mostly been using Hyperterm on the PC end. I bought one of the USB base stations that Selmaware sells. It uses a CP2102 for the USB-serial adapter and Silicon Labs' drivers don't work on an Intel-based Mac so I can't use it with Mac software. I can run Windows and the Windows drivers work fine with it ... so Hyperterm it is for now.
I have the base station and the compass , do I need the vga & keyboard plug ins . Also where did you get the IR from , I can't find them on parallax's web site ?
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Thank's Brian
www.truckwiz.com
·"Imagination is more important than knowledge..." ·· Albert Einstein
I did use the Accessory Kit (VGA/keyboard/mouse/servo connectors) and used the VGA/keyboard connections for debugging BOE-BOT Basic. You don't need them.
If you don't use the VGA/keyboard/mouse connectors, you can use those I/O pins for the compass rather than having to use an I/O extender as I did. The existing HM55B code comments in the Object Exchange shows how to connect it.
Post Edited (Mike Green) : 3/23/2007 2:54:52 PM GMT
Here's the deal ,I have a bigger robot in the works . Instead of reinventing the wheel .I rather put my time into machining . I'll work on the fabrication part , your software is really close to what I'm going to need. Any sensor you want to add ,I have (except IR ,should be here tuesday).Some time next week all my parts should be in , I'll pm you with the some specs.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Thank's Brian
www.truckwiz.com
·"Imagination is more important than knowledge..." ·· Albert Einstein
I thought about this ,check my new post in robots
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Thank's Brian
www.truckwiz.com
·"Imagination is more important than knowledge..." ·· Albert Einstein
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Thank's Brian
www.truckwiz.com
·"Imagination is more important than knowledge..." ·· Albert Einstein
http://www.diycalculator.com/subroutines.shtml· My favorite website ( Bet you can't guess why)
It's a version of "Roaming with a PING" that continuously checks its environment for a long clear path even while the BOE-BOT is moving. I'm not sure where the name came from. It was posted recently on the forums and I thought it would be fun to play with.
Heres a little info, three pings in front and three pings in rear , ~~~~~~~ Hela monster
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Thank's Brian
www.truckwiz.com
·"Imagination is more important than knowledge..." ·· Albert Einstein
http://www.diycalculator.com/subroutines.shtml· My favorite website ( Bet you can't guess why)
I must have missed it ?
Where did you purchase your SD card breakout board.
Is there a previously working project thread. I checked the Robotics and Proppeller forums·and could not find it ?
Great job on your robot!
Rob7
Thanks, Mike
Rob7
I was wondering ? I am at the stage to start my next upgrade on my· Beo-Bot! I am working· on controlling my bot with blue tooth thru my Pda.
I have not had time look thru all the specs for the x-bee or the eb500 at this time and have not assigned requirments for my upgrade. Just thinking outloud at the moment.
My question is, Why did you chose the xbee over the eb500?
Rob 7
I think the main reason is that the xBee takes less power than the eb500, is smaller, and is simpler to configure. It has the disadvantage that it requires a second xBee on the PC side although I have a MacBook which, like most Macs, always comes with Bluetooth. The MaxStream xBee doesn't need any interface stuff with the Propeller since it runs off 3.3V and has 3.3V inputs/outputs. The eb500 is designed for use with the Stamp and is based on 5V logic. None of this is a big deal, it's just a little easier to use the xBee with the Propeller. SparkFun now has a breakout board for the xBee which gives yet another option for mounting it.
I will take a look at the xbee spec's and make a decision soon.
Rob7
How would using the new spin stamp·on a "stock" BOE Bot compare to what you have done here? Just thinking...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
I was an alpha tester for the Spin Stamp and my original BOE-BOT was done that way. I switched to the Protoboard mostly to have the VGA, keyboard, and mouse connectors (and I added TV output myself as well). That mostly uses up the other 16 pins. I also wanted to have permanent wiring for the extra sensors (PING, HM55B compass, accelerometer, IR distance sensors, etc.) and an SD card. Currently, I'm using BoeBotBasic with the Protoboard BOT. If you want to use a Spin Stamp with BoeBotBasic, you'll have to change the clock constants to the Hydra's (10MHz crystal with 8x PLL).
I used Selmaware's xBee AppMod for wireless communication and extra EEPROM rather than the SD card (on the BOE).
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Whit+
"We keep moving forward, opening new doors, and doing new things, because we're curious and curiosity keeps leading us down new paths." - Walt Disney
·
Hi,
I tried to find the 350-00014 in a Parallax.com search but it came up with nothing ... what is the product ID code?
It can be found as two parts. Here is a link to the I/R transmitter:
http://www.parallax.com/Store/Components/Optoelectronics/tabid/152/CategoryID/30/List/0/SortField/0/Level/a/ProductID/178/Default.aspx
This is a link to the I/R receiver:
http://www.parallax.com/Store/Components/Optoelectronics/tabid/152/CategoryID/30/List/0/SortField/0/Level/a/ProductID/177/Default.aspx
Regards,
Bruce Bates
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When all else fails, try inserting a new battery.
Post Edited (Bruce Bates) : 11/23/2008 2:01:45 AM GMT
Nor is it a Propeller powered BOE-BOT!
It's a PROBO-BOT. (Propeller-pROtoBOard - roBOT).
Anyways, it's cool, My head is right now smart enough to think up names. (HOBO-BOT, Homework Board BOE-BOT)
Post Edited (Ezsynn) : 1/22/2009 9:31:41 AM GMT
On the AppBee-Proto board, did you (or is it necessary to) connect pins other than Vss, Vdd, Tx, Rx? I notice you only list in spurce the Tx and Rx as connected to prop, and I know the XBee has built in pullup on the reset.