

Mars Rover Bot

Hey Everyone,
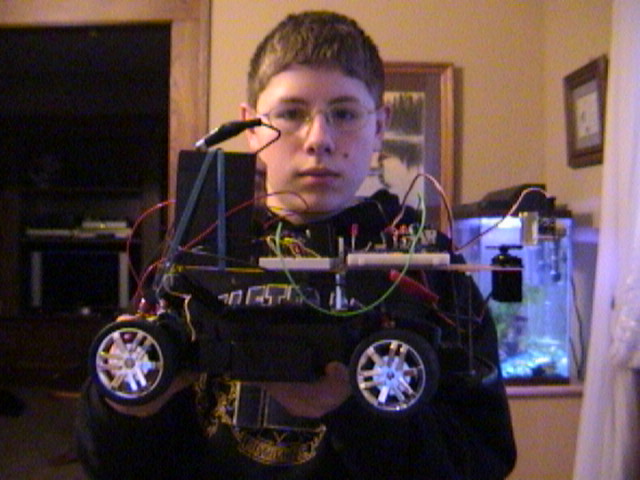
If anyone read Servo magazine a couple monthes ago, you'll no doubt recall the article about turning an R/C car into a "Mars Rover bot."· This is my version of the robot built in that article; although mine has one big advantage over the author's, the Propeller multi-controller.
I Posted a video on Youtube here.
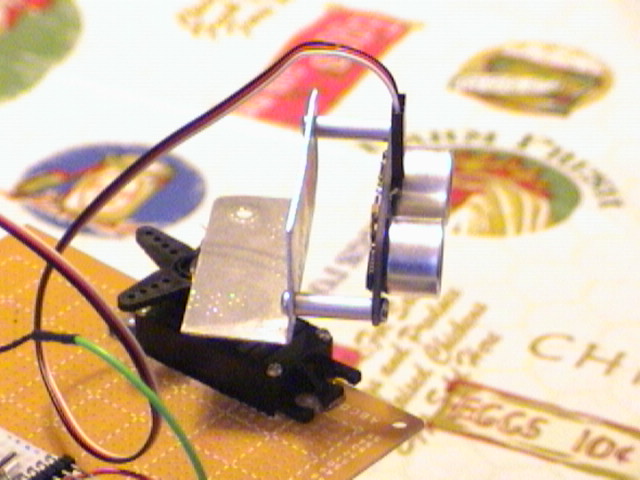
It is powered by the stock 2A (5A stall)·9.6v motor (which I currently have overvolted by 2.4v). Steering is accomplished by a hobby servo.· The main sensor is the Parallax Ping mounted on another servo.· Currently it is mearly avoiding obsticals (still a tough job at the speed it travels, in the video, you see 35% it's max speed).· Although, with a few software mods, it could follow walls.· With just a little bit more hardware, it could even compete as a robotic vacuum cleaner or fire fighter.
Endless Possibilities,
Craig
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
NerdMaster
For
Life
If anyone read Servo magazine a couple monthes ago, you'll no doubt recall the article about turning an R/C car into a "Mars Rover bot."· This is my version of the robot built in that article; although mine has one big advantage over the author's, the Propeller multi-controller.
I Posted a video on Youtube here.
It is powered by the stock 2A (5A stall)·9.6v motor (which I currently have overvolted by 2.4v). Steering is accomplished by a hobby servo.· The main sensor is the Parallax Ping mounted on another servo.· Currently it is mearly avoiding obsticals (still a tough job at the speed it travels, in the video, you see 35% it's max speed).· Although, with a few software mods, it could follow walls.· With just a little bit more hardware, it could even compete as a robotic vacuum cleaner or fire fighter.
Endless Possibilities,
Craig
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
NerdMaster
For
Life
Comments
Very good project!!!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
-Rule your Destiny-
--Be Good. Be Bad. Be Provas--
The hellinic (Greek) robots portal: Greekbotics
Many Projects and Schematics by the users·and also robotic news
(Translate using babelfish)
That's a nice project you're currently developing. I watched the
video on YouTube and it sort of reminds me of the Sumobot that got
me introduced to Parallax products.
Keep up the interesting work!
Regards
Jim
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Thanks, Parallax!
In the next couple monthes I plan on modifing it with an model airplane propeller and motor along with a hacked infared thremometer. As long as I can get to san francisco next year (it's only 2547 miles away) I plan on competeing in the robotic firefighting event at the Robogames.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
NerdMaster
For
Life
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
lets see what this does... KA BOOM (note to self do not cross red and black)
I see you used the Ping)))
I like that sensor, it is in use in my cartographer robot
you should enter that project in a science fair like I did!
good luck!
-Henry
I'm working on an eerily similar bot that is intended to put out fires in a maze (see http://forums.parallax.com/showthread.php?p=636997 (BASIC Stamp forum topic \ firefighting robot). I'd like to see your programming code even though I'm not using the Propeller; we could probably learn a thing or two from another. I currently need to use limit switches to get my 'head' servo, which also uses a ping))), to accomplish the same movement because the servo does not move consistently (I don't know if this is an error on my part or Parallax's).
Thanks,
Dr. Waters
Post Edited (amse2008) : 3/14/2007 12:18:59 AM GMT
··· I am interested to learn why you need limit switches on your ping turret.· I'm useing parallax servo too, mine are all very accurate.· Please post your code, I'd like to look over it.
Thanks,
Craig
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
NerdMaster
For
Life
I took a look at your code and, for not knowing swing much at all, I can kind of understand what is going on. (Meaning its not that bad). My code is in PBASIC, because I don't use the Propeller, but I'm pretty proud of its simplicity despite the shortcomings of BASIC in general. I'm not a big fan of not having functions (which makes Swing all the more appealing) and such available, so I have done my best to compartmentalize the code to simulate functions. I have attached updated (but still incomplete) AutoCAD .dwg's of my bot and the maze, as well as the latest code.
The main reason for the limit switches is eliminating the risk of silly error and is more flexible than dead reckoning with times or iterations. After some initial frustration with evolving my chassis, I decided to add them on, but as the design is now probably final, there is no real need for them except reducing inconsistencies. The turret turns to the left until it trips one switch, records the iterations and ping/temperature data, turns all the way to the right and does the same, then divides the total iterations by three to find the distance to the center. This seems to be an optimal solution for me, because it allows future upgrades to not require software updates On top of this, it has helped me identify shoddy wiring and soldering, as well as logic errors in the programming.
Thanks,
Dr. Waters
P.S. Assuming you are planning on doing something similar to what I am , if you find that my program logic works a bit better than yours, feel free to adapt it to Swing. I know I will be switching ASAP.
P.S. Dr. Waters: I think you mean SPIN not SWING.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
NerdMaster
For
Life
Re: SPIN vs. SWING: I'm a Java junkie.
For the steering I'd say work on differential drive (like a tank with treads) for something that size. Turning on the spot is good for mazes and such.
Dr. Waters
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
NerdMaster
For
Life