

Dear Mr. Gracey...
 Dennis Ferron
Posts: 480
Dennis Ferron
Posts: 480
I want to thank Ken Gracey for sending me a Propeller protoboard. When he said he would hold one back for me so that I wouldn't miss the preorder, I was pleasantly surprised, but I would not have been upset if I never got it because I know how hard it is for a busy person to attend to everything he has on his plate. Yet I did receive a protoboard just as he promised, and promptly too. So let me say that Ken Gracey is not only a man of his word, but also takes the time to personally attend to even his smallest customers. Thank you.
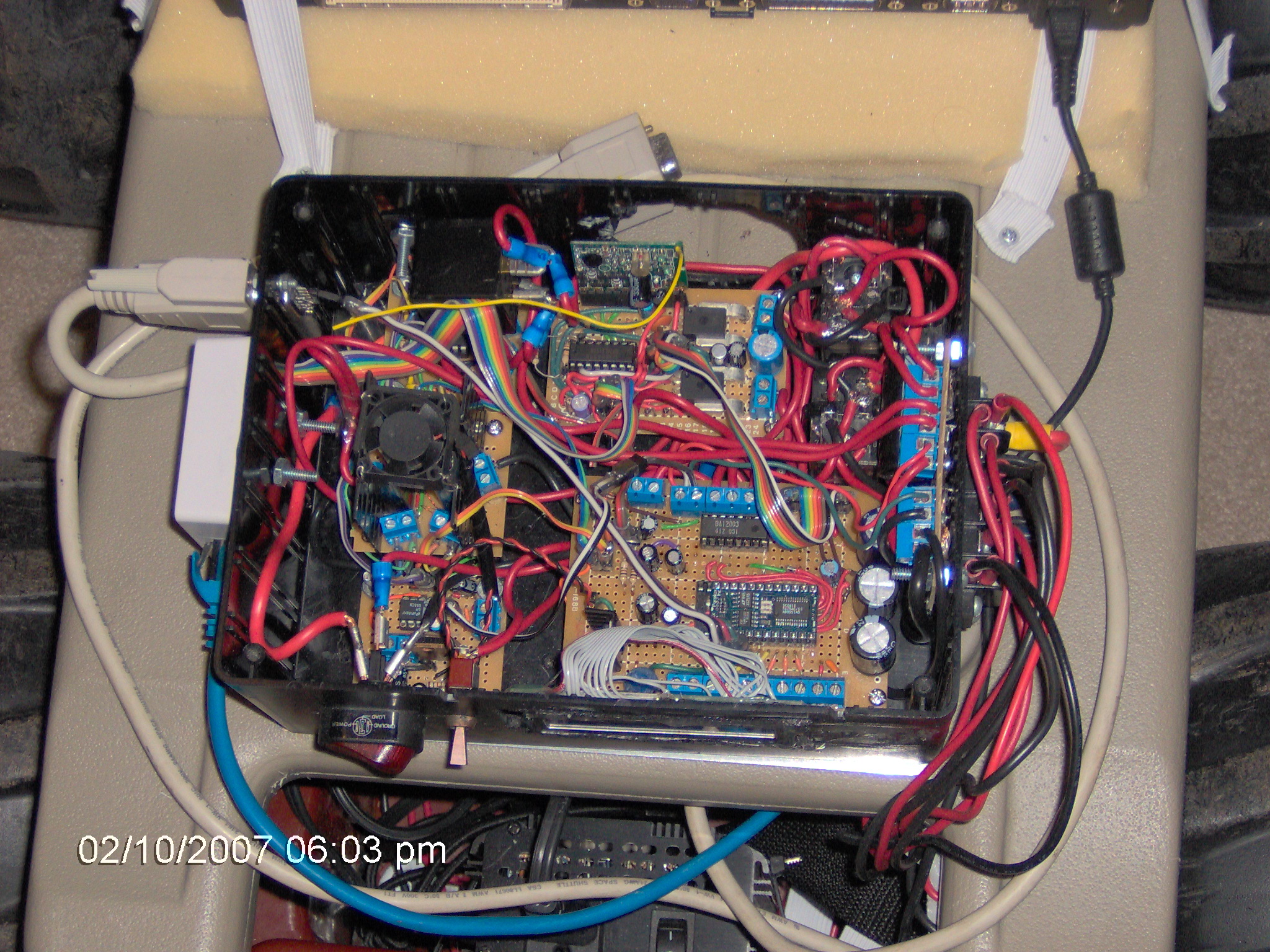
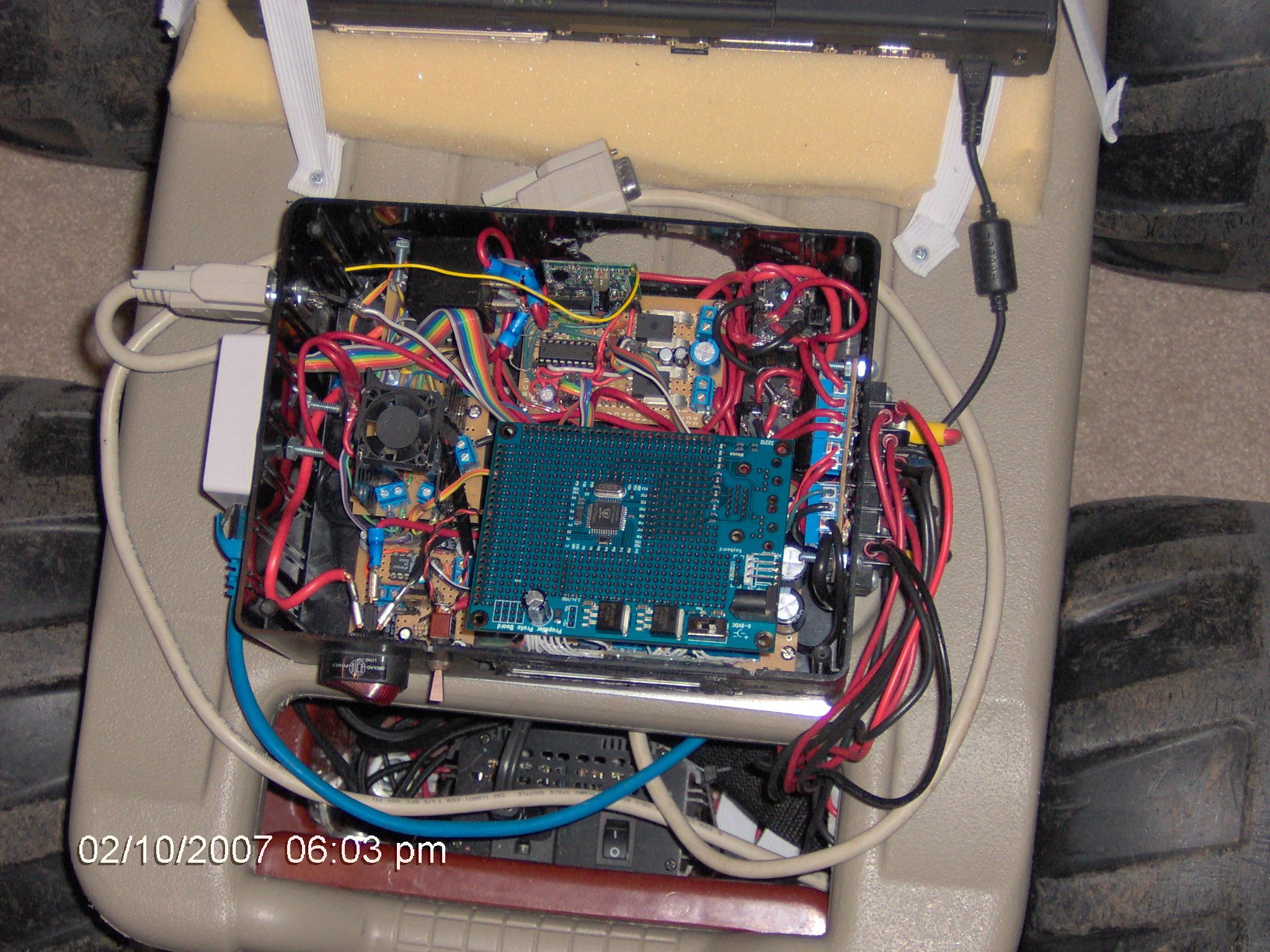
I thought I'd make a forum post out of this so I can share some pictures of the robot that I will be using the protoboard in. This protoboard will become the new brain for Hagrid. Hagrid is a large robot I built using parts from Powerwheels cars. I will be using him this summer to do research in robot teleoperation, which I hope to publish a research paper on. He currently contains a Basic Stamp SX, which is a fine microcontroller, but I'm trying to do too many things at once with it and have run up against a hard timing constraint. I will need to also add GPS capability, and there are not any resources left to do that with the Stamp and the circuit I have. Because of Mr. Gracey's generosity, I can now upgrade the controller to use a Propeller and make it ready to receive a GPS module when I come to that point. Having the Propeller protoboard to work with now gives me the chance to get a head start on that upgrade so that by summertime I may be ready to conduct the teleoperation experiments. It may very well have meant the difference between not having had time to build the circuit and finish my experiments, and now having time to do the experiments and publish my paper.
I attached some pictures of myself and the robot. For some reason the first question people always ask me about this robot is whether it can double as a beer cooler, so I also took a picture showing that yes, it has enough room inside to store a brewski or two.
I thought I'd make a forum post out of this so I can share some pictures of the robot that I will be using the protoboard in. This protoboard will become the new brain for Hagrid. Hagrid is a large robot I built using parts from Powerwheels cars. I will be using him this summer to do research in robot teleoperation, which I hope to publish a research paper on. He currently contains a Basic Stamp SX, which is a fine microcontroller, but I'm trying to do too many things at once with it and have run up against a hard timing constraint. I will need to also add GPS capability, and there are not any resources left to do that with the Stamp and the circuit I have. Because of Mr. Gracey's generosity, I can now upgrade the controller to use a Propeller and make it ready to receive a GPS module when I come to that point. Having the Propeller protoboard to work with now gives me the chance to get a head start on that upgrade so that by summertime I may be ready to conduct the teleoperation experiments. It may very well have meant the difference between not having had time to build the circuit and finish my experiments, and now having time to do the experiments and publish my paper.
I attached some pictures of myself and the robot. For some reason the first question people always ask me about this robot is whether it can double as a beer cooler, so I also took a picture showing that yes, it has enough room inside to store a brewski or two.

2048 x 1536 - 970K

2048 x 1536 - 977K
2048 x 1536 - 1M

2048 x 1536 - 1023K
2048 x 1536 - 1M
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
lets see what this does... KA BOOM (note to self do not cross red and black)
You are welcome! Many of our customers' interests and businesses were developed exactly from experiences just like yours, so we're pleased to help. Parallax is thankful to be in a position where we can provide hardware to our customers, sometimes for free. I'm also interested in GPS navigation for robotics so I'll hope to learn from your experiences. Maybe you'll be able to dispatch this robot to the local mini-mart and have it return with a bottle of beer!
Hagrid, auch eine sehr gute Name!
Sincerely,
Ken Gracey
Parallax, Inc.
Any plans to make it amphibious? It looks like with a little sealing, a lighter battery and some paddles on the wheels that monster would float!
Marty
(Thanks. Really Hagrid is of the Harry Potter book named, but I a bit of German [noparse][[/noparse]do] like speaking.)
But for my current purpose I won't need to go near any water, so I won't be trying to make it amphibious any time soon.
The way I plan to use the GPS is that I want to equip the robot with GPS, and with a camera on a servo so that it can pan some number of degrees left or right. The teleoperation task involves driving the robot to a location using the GPS for general position, and also using the camera panning to triangulate the robot's position from the angles to known landmarks. I'm hoping that can be used to get a closer accuracy than GPS alone. If a human sights in the landmarks for the robot, the robot's software could then inform the operator where it thinks the robot is based on the angles the camera ended up when the operator got done sighting things in.
Boeboy, there are actually 2 other robots just like this (only Hagrid has been wired up with electronics yet). If you think Hagrid is massive, you should see his brother Grawp - Grawp has the same body but his wheels are spaced farther apart and 70% larger in diameter than Hagrid's even! I plan to eventually get all 3 working, the idea being that once you do the hard part of designing and debugging 1 robot, 2 more don't take twice as long, they take a fraction of that time because you know what you're doing by then. And having more than one copy of the robot means more chance of having at least one running if the others are down for repairs.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
lets see what this does... KA BOOM (note to self do not cross red and black)
Great concept. Let's take it in pieces.
I have a daughter in college... I loaned her my car and a week at school. When I got it back there were a thousand miles on the odometer... my first question... which never exactly got answered was..."where did you go?"... that's a product.
We never exactly got to the question, "and what were you doing?"... that's a camera array... part of the same product?
You are going to have to drive your bot around a little bit to get the resolution you want... and you are going to want to know the exact distance of your stereo-base measurements... how about dropping pingers along the path and then go back to retrieve them? ... that's another product.... and it would be great for robot lawn mowing.
Do you want cyclopedian vision or stereo?
Rich
It will be a cyclops for cost reasons. If I ever make it autonomous I would want stereo vision so that the two cameras can be used to "double check" each other. A machine vision system is a long term goal but not practical at this moment.
Robot lawn mowing: I think the primary concern with autonomous commercial robot lawn mowers is going to be safety. The moment one goes awry and kills the neighbor's poodle or (heaven forbid) two-year-old, the lawsuit from that will be spectacular. If I were going to produce a robot lawn mower, I wouldn't go after the home market at all because of safety concerns; I'd go after the big institutions or businesses, places which have a large area to mow, hopefully a fence around it, and the layout doesn't change much and children won't be around. I've actually mowed ("by hand") at places where I worked, and one thing that I noticed was that there's a lot of areas which require you to physically pick up the mower and manhandle it over obstacles. That would be challenging to do with a robot unassisted. I do think robot lawn mowing will be one of the first areas we start to see robots more and more in the future.
As for the GPS recording where the car went, I'm surprised cars don't have that already? I mean, the police would absolutely love it if they could pull a black box out a car and find all the places it's gone. I wouldn't want one of those boxes on MY car, but I can see it happening in the future.
GPS tracking and location transmission is called APRS - set up by Ham radio users. Google it for details if you want to use it.
There are many autonomous lawnmowers already on the market. Some work quite well and I haven't heard of any lawsuits yet. Don't worry about lawyers right now. You're too young for that and you're not a target for them. Live your technical dreams out because the time goes by whether or not you're putting your skills to use.
Yours,
Dear Mr. Gracey [noparse]:)[/noparse]
Ken