

Best motor to steer my robot?

Hello all:
I was a newbie a couple of years ago, since then I built a 200 pound robot. I am now working on my second prototype.
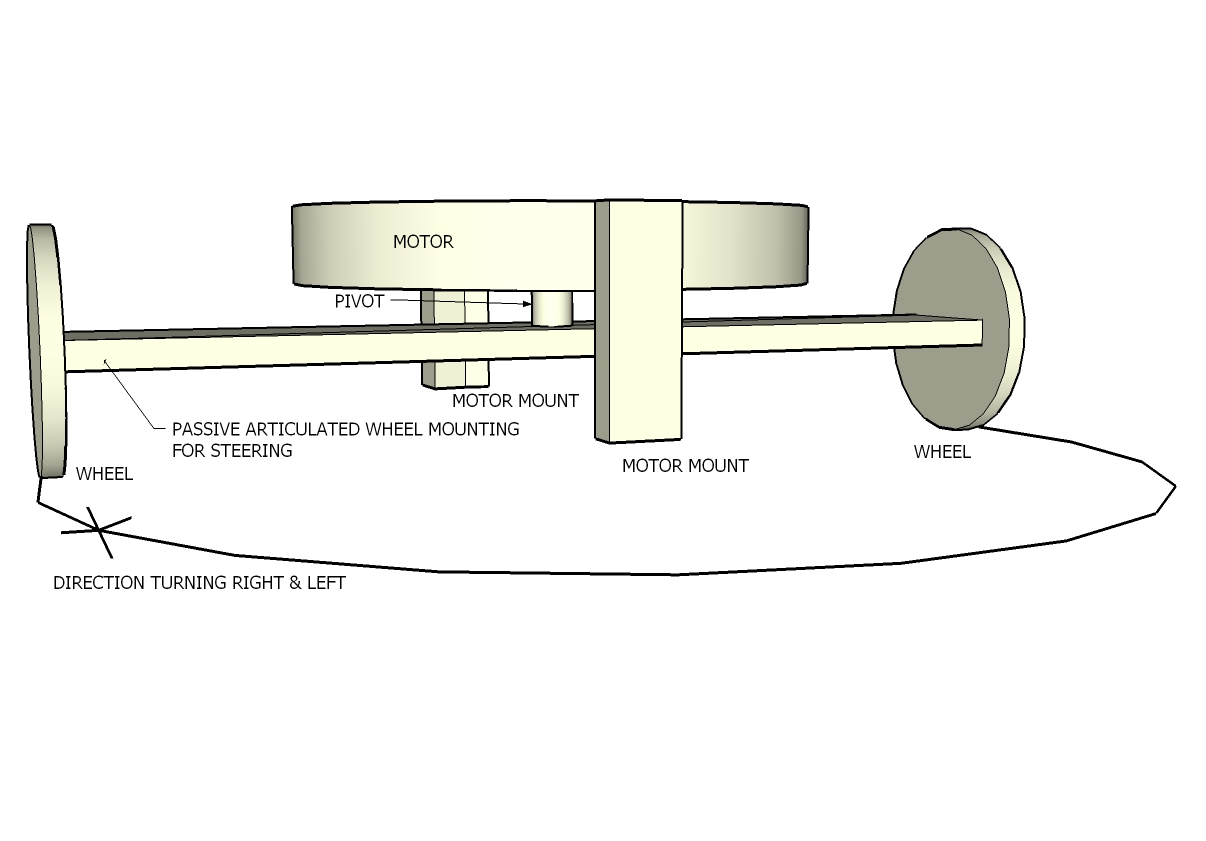
This will carry 200 pounds and will be steered by an articulated pivot on the front two wheels. See picture. How much torque does the motor
need for steering. The robot is propelled by another motor. I am thinking about using a stepper motor. I welcome anyone's suggestion about
the ideal motor to use. The motor will be controlled by a joystick. The method of steering is set in stone but the motor type is not
Thanks,
andrew777
I was a newbie a couple of years ago, since then I built a 200 pound robot. I am now working on my second prototype.
This will carry 200 pounds and will be steered by an articulated pivot on the front two wheels. See picture. How much torque does the motor
need for steering. The robot is propelled by another motor. I am thinking about using a stepper motor. I welcome anyone's suggestion about
the ideal motor to use. The motor will be controlled by a joystick. The method of steering is set in stone but the motor type is not
Thanks,
andrew777
1206 x 841 - 125K
Comments
I need to better understand the planned method of locomotion. From the drawing I see that the robot has two drive wheels - and that's all. Does the motor mount drag on the ground somehow, or is there a balance system to keep the front and back parts airborne? Are there going to be casters in these front/aft locations?
If you are looking for a motor to handle the middle pivot I'd say a stepper is the wrong choice. I'd imagine you'd need a highly-geared DC gearmotor. Is the pivot motor only used when the robot is turning? Are there seperate motors for the drive wheels? Is the robot comprised by linking multiple sections of the "robot2.jpg" drawing together?
Ken Gracey
Parallax, Inc.
Hello Ken and to all:
The robot has four wheels including the two front wheels. The rear wheels are attached to a rear drive motor.
The two front wheels are passively rotating and the motor is used for turning left and right via the pivot. Nasa has used this
method on some of their robots. I don't know the specific specs of the Nasa motors but know that it works.
The rest of the robot is down pat, what is needed the ideal motor type selection and why? These suggestions would be
welcome, informative and helpful.
andrew777
yes you are in thinking of he stepper motor i also built a hero 1 in the late 80's rarly 90's and the hero uses a stepper motor for sterring and for turning the head , but the were geard for smoother opration, useing the stepper motors will give you the the ablity to program your left,center,right better using ,ramping,liner,or exp inputs from your I/r detectors. use the bistep two motor controller from parallax and it wiill take care or both sterring and the head.
Hello al-spider and all:
Thank you for your suggestion. I have some questions about the inputs that you mentioned, are they on the bistep controller (ramping, liner and exp.)? What are liner and exp. inputs? Did the stepper motor come already geared, and if not, how did you gear it? If I don't know, I ask.
Thank you for your help.
andrew777
Although I understand the drawing, I do not understand how the robot is going to steer and move (do I see a motor on top of the pivot?.. is it the idea to use it to steer??), it looks like you need to provide a more final drawing with all the motors and purpose of each one in order for us to be more helpful...
Happy Roboting!
Hello Joe "bot" Red and all:
The drawing is of the steering assembly the rest of the robot is not important for the question I'm posing. The robot is has rear two wheel·drive. The question I'm asking is what ideal motor can be used for the articulated or turning pivot. I repeat the robot is propelled by rear wheel drive. The front wheels are passively turned by the rear wheel drive. The front wheels are turned left, right··and center by the motor that I need suggestions with. A servo might be good, but a geared stepper might be easier to control I have to look at its costs. What do you think? I think al-spider understands the concept that I'm talking about. Read his post.
Thanks for your suggestion,
andrew777
A servo motor is usually easier to control compared to a stepper motor, since the servo only requires one pin generating the position pulse, all the electronics neccesary for driving the motor (H-Bridge and controller IC) are packaged inside the servo, so there is no need for external circuitry, Stepper motors require at least 2 pins, one for the direction and one for generating the steps (when you are using a Stepper Controller IC), you can also build the circuit (the design depends on whether the Stepper is a Bipolar or Unipolar type, but basically a bipolar motor requires four pins for control, and two Full H-Bridges, one for each winding, for Unipolar, you can drive power transistors for each Phase of the stepper motor, the number of pins and transistors depends on the number of phases of the unipolar motor)...
The Stepper motor is usually more precise compared to the Servo, especially when you want the pivot to move by just a tiny amount, and that is an important decision parameter, if you want the pivot to return to exactly the same location or to move it by tiny angular movements at a time... then a Stepper is a better choice..
Cost wise... I believe the Stepper motor would be cheaper, the source of frustration can come from the circuit choosed to handle the Stepper motor, there are Stepper Controller ICs with internal H-bridges, but they won't usually handle more than 3 amps, above that you can either find a finished product or build your own (there are many options, I will be more than happy to help you with them)
Here are some options for Controller ICs (both Bipolar and Unipolar):
http://www.allegromicro.com/ic/motor.asp
Here is some info about Servo motors (look for the higher torque models):
http://www.fatlion.com/sailplanes/servochart.html
I hope this helps!!.. c-ya!
Post Edited (Joe "Bot" Red) : 1/29/2007 10:06:09 PM GMT
Thanks for the info about the two motors, Joe. I welcome your help after I look at the web sites that you listed. This gives me an avenue to pursue.
Thanks,
andrew777
well we all have good thought on this matter for what i've all ready been through this imy two cents.
YES GEARD stepper are hard to come by but not impossable you just have to digg deep here is pic of the org. motor used or the hero1 it's made by (ECM MOTOR CO. ) but i don't think it can handle 200lbs.
as an up-grade to this i 've tryed to use a geard dc motor shown installed iinside the hero body this woorks find . Except that dc motors cost to a stop , this is not all lost , most motors an have an all stop command and with an elect break attacted you could get better control . the hero has only a single wheel drive config as shown in the last pic which allow it to pivot almost 360 with two limit on the left & right to trigger the all stop on the motor and this is were the stepper pays off in its ablity stop and hold sead position . like returning to center!! as for LINEAR ( THIS IS TO SAY THAT IF YOUR I/R DETECTOR GOES FROM 80CM DOWN TO 10 ,SO AT 80CM YOU GET FULL VOLTAGE OR SPEED AND AS YOU APPROCH 10CM YOUR VOLTAGE DROPS CLOSE TO ZERO CAUSEING YOUR MOTOR STEER SMOTHELY IN THE PROGRAMED DIRECTION. LINEAR GIVES YOU BETTER RESOLUTION. EXPONENTIAL gives you larger steps in ichanges ie.
vslow ,slow,normal,fast,vfast
15%, 30%, 50%, 75%,100% as you go from 80cm to 10cm
last i think the longer the steering rod ste less troque maybe requiired the way you have there is alot of weight on the steering motor// ie.. use more of a rack&pinion tyoe steering with two wheel .
I actually have a similar problem. I am adapting a Power Wheels toy to become a 130 lb robotic platform for a physically challenged friend of mine. The Power Wheels gas pedal/brake pedal can be activated by a relay. The high speed, low speed shifter can also be activated by a relay. However, I'm having trouble with the steering. I want to use a servo for the steering control. The highest torque production servo is the Seiko PS-050, generating 2000 ounce-in of torque. If you put it in a 5:1 gearing ratio, you'll get 10,000 ounce-in of torque. The problem is, I have no idea how to hook it up to a gear system. If you choose to use my idea, please make an extra set of gears for me, too (and provide very detailed pics & schematics as I am only 17 yrs old). I would truly appreciate it if you'd send me all parts necessary to hook it up to the steering, identical to the way you have it hooked up. If necessary, I can discard the Power Wheels steering and adapt your system (and just use Power Wheels for the drive system). I will gladly pay for the parts.
Thanks,
Lilly.
P.S. Just google for Seiko PS-050 and you will find at least 3 retailers of this wonder servo in the top 10 search results.
P.P.S. You might not need gearing at all if you use this even more powerful monster servo, the Seiko SSPS105. It generates 27 ft-lbs of torque! I cannot afford it, though. It is almost $600.
Post Edited (latigerlilly) : 1/30/2007 5:40:54 AM GMT
I thought about doing the following, but decided against it because everything might jiggle loose if there is no custom machined keyway:
Example A
1. drill hole in aluminum ruler and screw onto the shaft of the motor.
2. drill holes in sprocket and attach with bolts onto the aluminum ruler (after drilling more holes in aluminum ruler).
3. when the motor spins, the sprocket will spin because it is attached to the motor's shaft with an aluminum ruler.
Example B
Or, just hunt until I find a sprocket with a center hole that will fit my motor shaft. Then, just bolt it on with a nut.
The problem with Example B is, when the motor spins, the spinning motion might unscrew the nut that is holding the sprocket to the shaft. Then, if it just loosens a little, the shaft will spin without turning the sprocket.
The problem with Example A is, when the motor spins, the spinning motion might unscrew the nut that is holding the ruler to the shaft. Then, if it just loosens a little, the shaft will spin without turning the sprocket.
I am only spinning the motor at 60 to 120 rpm max, but over time, this might still happen unless the attachment is made with a custom machined keyway on the sprocket that will fit the shaft's spline shape perfectly so that even if the nut holding everything down jiggles a little loose, the shaft will still turn the sprocket.
This is just a thought, turn your focus away for a moment from the idea of moving the central pivot point to turn the wheels. Instead allow the central pivot to be freely connected and think about a front braking strategy that applies a small amount of brake to the front wheel opposite of where you want to go. Braking could be accomplished by using two motors in free-spin mode and shunting/shorting the appropriate motor terminals.
This way you wouldn't necessarily need a high-torque steering solution.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Beau Schwabe
IC Layout Engineer
Parallax, Inc.
The reason why writing you back Beau, is because I had a similar ideal, instead of using two motors, use two solenoids as brakes one on each wheel. Brake on the opposite side of the of where you want to go. What do you think?
I think this might be the simplest solution. I've also think that the torque of turning a 200 pound robot is not as great in a moving robot. Force = 0.01* 200lbs = 2 pounds of force
Torque = 3in * 2.0lbs of force = 6lb-in = 96oz-in is my math correct for a 3 inch wheel?
What do all of you think about this ideal?.
andrew777
Just out of curiosity, where does this part of your formula/calculation come from, or how is it justified?
Force = 0.01* 200lbs = 2 pounds of force
Regards,
Bruce Bates
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
<!--StartFragment -->
Using solenoids as brakes would work, but I think you would get more precision using a motor since you could apply various amounts of brake via PWM. Not that you couldn't PWM a solenoid, but I tend to think of a solenoid as more of a linear device, where a motor is obviously a rotational device. Keeping a common denominator (rotational vs. linear) will ultimately help simplify the overall design.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Beau Schwabe
IC Layout Engineer
Parallax, Inc.
1. Just buy a sprocket that is not finished bored and drill it to the size fo the splined shaft of the wiper motor then use a setscrew to lock it down on the splines.
2. Buy a sprocket that has a split collar lock and it will grip down on the shaft.
3. Their are some ready made sprockets for such motors people use them to automate things on automobiles, I cant find the websight but I will add it when I come across it again, they have sprockets that fit on the splined shafts.
check this wiper motor already stub shafted.
http://www.robotcombat.com/marketplace_motors_ame.html
buy the way HSC has some wiper motors for sale
http://www.halted.com/commerce/catalog/product.jsp?product_id=21328&czuid=1170183709691
Also look at these sights.
http://groups.msn.com/VillageHaunt/spiderwiperchapteri.msnw
http://webplaza.pt.lu/gklares/Robot/dreirad.html
http://www.roboteq.com/links.html
http://jimspage.co.nz/motor.htm
http://www.sprocketslog.blogspot.com/
http://www.robotics.com/robomenu/index.html
I never thought to slip the setscrew inside the spline to lock it down and prevent slippage! I learn something new from you guys everyday!
As I am being homeschooled in rural Texas, you guys are truly my only teachers since I have surpassed the math/science abilities of my parents.
Thanks again,
Lilly.
P.S. I don't think that windshield motors are reversible, so I can't use them. I want to use them because they are inexpensive. I have a very tight budget as I am only 17 yrs old. If there's a way to make them reversible or if there are reversible windshield wiper motors, please let me know.
Hello Bruce Bates and all.
You can do a study of friction on:· http://www.school-for-champions.com:80/science/frictionrolling.htm and you will see that rolling friction is less than starting friction. And some rolling friction is less than .01 which is the friction coefficient for some surfaces. That is why you can move a heavy·objects with a hand truck even over a carpet.· But you can't drag a heavy object easily over a carpet.
·http://www.linengineering.com sells gearboxes and high torque motors stepper and others some are expensive and some not as expensive.
New thought : a linear actuator attached to the left side with a movable linkage could push and pull the wheels assembly left and right. When the actuator length is in the middle the wheels are centered when it's pulled in the wheels move left, when the actuator length is extended past the middle the wheels move right.
What do all think of this ideal?· I think it is simple and passive the rear drive supplies most of work.
Thanks, andrew777
Post Edited (andrew777) : 1/30/2007 8:39:01 PM GMT
A windshield wiper motor rotates continuously it swipes back-and-forth by its linkages. It can be reversed by the type of controller you use. Here's a web site that uses windshield wiper motors for projects http://www.scary-terry.com/wipmtr/wipmtr.htm A hope that it will give you all the answers you need.
andrew777
Also if you dont want to worry about the Isolating the motor you can use Electric Window motors off of a car, they are still very strong and should work for you as well and most of them have a small round shaft with a flat milled into it which should allow you to lock the setscrew of a sprocket to it..
Post Edited (bennettdan) : 1/30/2007 10:12:47 PM GMT
This is for anyone who wants to know. This was on the school for champions web site.
Minimum torque to start object moving
Question
October 10, 2004
hey, so what is the minimum torque that starts an obect moving? There must be a minimum value for the wheels to start rotating right?
Thanks for answering this question
Kevin - Singapore
4601
Answer
It depends on the static coefficient of friction of the surfaces in contact, the weight of the wheel, and the radius of the wheel.
Minimun Torque to start wheel rolling = radius x coefficent of static friction x weight.
If you increase the torque over the minimum, the wheel will start spinning
andrew777
If your pulley doesn't come with a locking screw and you don't have the tools to tap/die your own you can drill a hole all the way through both the pulley and shaft then epoxy/glue/press a metal bar into that hole. (You may never get the pulley off, though) I've used this method many times to mount wheels onto axles. (Check attachment for illustration)
Post Edited (fmx95) : 1/31/2007 4:22:57 PM GMT