

Which rotational sensor...
 Paul Sherman
Posts: 11
Paul Sherman
Posts: 11
...would be best for my project?
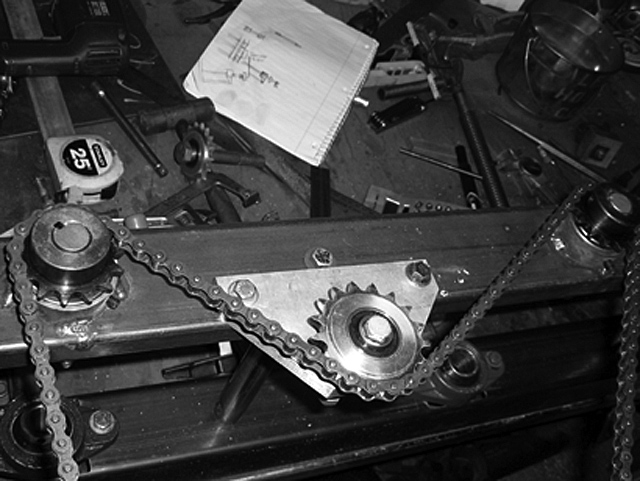
I need to make a BS2 aware of direction and RPM (this will be a very slow rotation, 30-40 RPM). I can use either a shaft, sprocket, idler sprocket, or flange bearing to get the info from, so I have options there.
My machine will most likely be pretty jerky & lumbering, so something delicate that needs to maintain a precise distance from sensor might not be ideal. "Forgiving" would be a good feature here.
So, photoelectric, infrared, hall effect; which would be suited best?
Thanks
Paul
I need to make a BS2 aware of direction and RPM (this will be a very slow rotation, 30-40 RPM). I can use either a shaft, sprocket, idler sprocket, or flange bearing to get the info from, so I have options there.
My machine will most likely be pretty jerky & lumbering, so something delicate that needs to maintain a precise distance from sensor might not be ideal. "Forgiving" would be a good feature here.
So, photoelectric, infrared, hall effect; which would be suited best?
Thanks
Paul
640 x 481 - 155K
Comments
Not necessarily "firm" on the BS2, I just have a BOE so it's easy to test with what I've got. Sounds like the BS2 will be fairly useful here, I'll check out the quadrature encoder.
Would the Propeller be a better choice here?
Thanks
Paul
This won't be sold. I just wanted to build & develop a large walking machine; learning the programming is a recent development.
I will check out the Propeller...
Thanks a lot-
Paul