

CANbus with the SX-28 - PC interface
 LoopyByteloose
Posts: 12,537
LoopyByteloose
Posts: 12,537
Well, I previously posted my CANbus node with the BasicStamp.
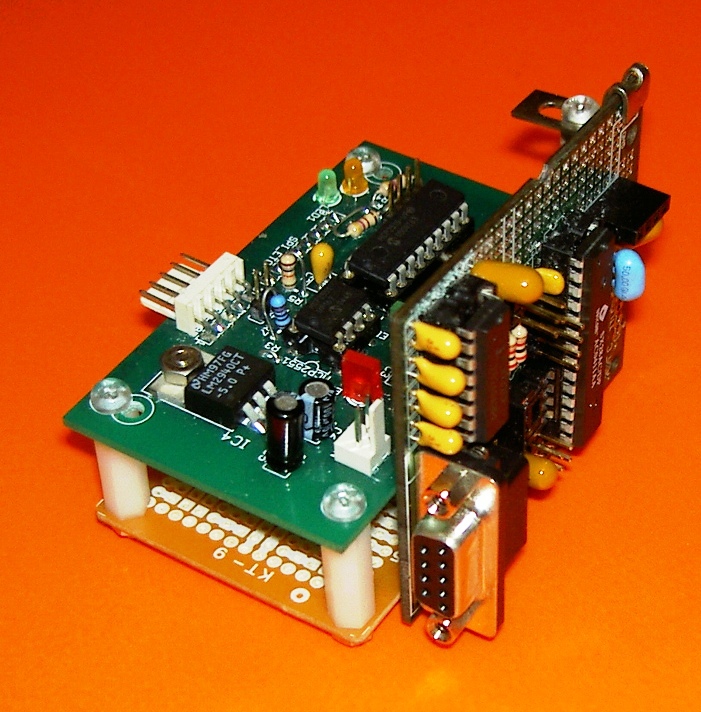
But I needed a Master node that would allow a PC to monitor the CANbus traffic via HyperTerminal.
To do so, I have joined one of Guenther's Multiboards [noparse][[/noparse]has the RS-232 level shifters and an SX-28] with my CANsolo board.
I have tested in all for funtionality and it is working fine.· Basically it is RS-232 converted to SPI in a full-duplex mode.
In this case all power is supplied by the CANsolo which already has power.
I am still trying to create the software to support a menu selection of various commands to the MCP2515.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"If you want more fiber, eat the package.· Not enough?· Eat the manual."········
But I needed a Master node that would allow a PC to monitor the CANbus traffic via HyperTerminal.
To do so, I have joined one of Guenther's Multiboards [noparse][[/noparse]has the RS-232 level shifters and an SX-28] with my CANsolo board.
I have tested in all for funtionality and it is working fine.· Basically it is RS-232 converted to SPI in a full-duplex mode.
In this case all power is supplied by the CANsolo which already has power.
I am still trying to create the software to support a menu selection of various commands to the MCP2515.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"If you want more fiber, eat the package.· Not enough?· Eat the manual."········
···················· Tropical regards,····· G. Herzog [noparse][[/noparse]·黃鶴 ]·in Taiwan
701 x 712 - 221K
Comments
Having done that, I strongly recommend getting the CanBus board for a much cleaner solution...
I hope I won't be accused of "Crimes against Electronics" due to my attack on the SX Multiboard.
Anyhow, believe it or not, it works fine...
Attached is also an SX/B program that let's you send singe byte messages over the can bus.
Use 38400 baud, 8 data bits, No parity, 1 Stop bit and No Flow Control.
Note that the "String" functionality is more of a test than anything else and the code will be cleaned up later today.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Living on the planet Earth might be expensive but it includes a free trip around the sun every year...
Experience level:
[noparse][[/noparse] ] Let's connect the motor to pin 1, it's a 6V motor so it should be fine.
[noparse][[/noparse] ] OK, I got my resistors hooked up with the LEDs.
[noparse][[/noparse]X] I got the Motor hooked up with the H-bridge and the 555 is supplying the PWM.
[noparse][[/noparse] ] Now, if I can only program the BOE-BOT to interface with he Flux Capacitor.
[noparse][[/noparse] ] I dream in SX28 assembler...
/Bamse
I hacked one of my multiboards to have a second RS-232 port on board as the MAX232 has an unused RX and TX, but no room for CANbus.
The only advantage with stacking·separate boards is that you can simply unplug and reconfigure as your knowledge and resources evolve. In your case, the multiboard is nearly dedicated to CANbus use. I was thinking I could do a dedicated board with the SX28 Proto Board too. Actually, it has a lot more room to do so [noparse][[/noparse]but less features].
The permutations are infinite.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"If you want more fiber, eat the package.· Not enough?· Eat the manual."········