

Boe-Bot Contest #1: Waypoint Navigation
 Andy Lindsay (Parallax)
Posts: 1,919
Andy Lindsay (Parallax)
Posts: 1,919
Contest #1: Waypoint Navigation
·
Many factory delivery robots rely on lines painted on the floor, hidden wires, or even tracks to show them the way to their next deliveries.· On the other hand, there are lots of other robots that have much less to go on.· The Mars Rover, for example, gets radio instructions from earth that tell it where to go and what to do, and it has to carry out those instructions as precisely as it can.· No human had the luxury of visiting the Martian·landscape before designing this robot.· Even so, the robot far exceeded the designers' and builders' expectations.·
·
A little closer to home, the military sponsored 2005 DARPA Grand Challenge offered a $2-million prize purse to the first vehicle to successfully complete a 132 mile outdoor course.· Global Positioning System (GPS) waypoints were supplied to the contestants, and it was their job to design vehicles that could navigate by these waypoints.· In 2005, several vehicles were able to complete the course.· A year·earlier, at the first Grand Challenge, groups of engineers, students, military contractors and private individuals all discovered how difficult and technically challenging this contest is when the best vehicle only managed to travel seven miles into the course.· The 2007 challenge will be·a 60-mile·urban course.
·
Another robot that uses waypoint navigation is the machine that places the chips on each BASIC Stamp module.· It's called a pick and place machine, and it uses machine vision to find dots on the edges of a panel of BASIC Stamp modules to tune the position of its picking and placing head.· Although the coordinates of each chip location are pre-programmed into the machine, it still has to use machine vision to find the pads each chip goes onto and line up its pins with those pads as it precisely places the part.
·
The Boe-Bot waypoint navigation contest is quite simple compared to these other more sophisticated robots and the tasks they have to accomplish.· Even so, it will give beginning robot designers a glimpse into the myriad of challenges the people who designed and build the more sophisticated robots faced with.· These challenges include figuring out what kind of equipment will give the contestant's Boe-Bot a competitive edge, testing and tuning the equipment, and in some cases,·scrapping or updating certain pieces of equipment that don't' do the job as well as expected.· Mechanical, circuit, and software (PBASIC program) designs will also play a very important role in each contestant robot's performance, as they do with the Mars Rover, the DARPA challenge vehicles, and the pick and place machine in the Parallax manufacturing area.
Contest Overview
These contests may be held by a single class or club, or with groups competing against each other from different classes, clubs, schools or regions.·
·
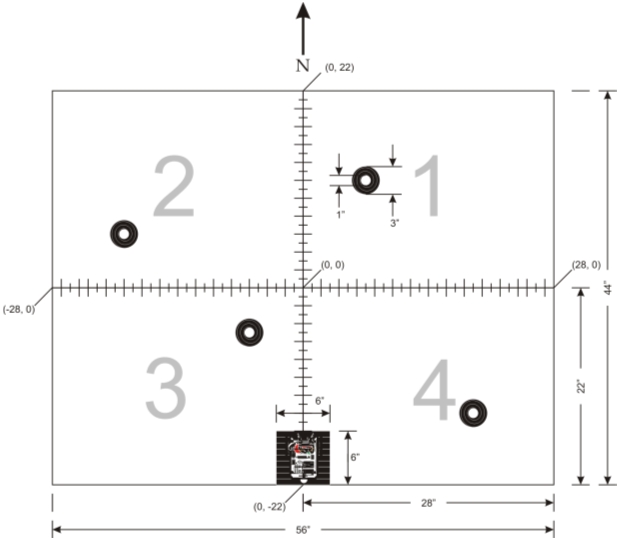
Figure 1-1 shows the basic Boe-Bot waypoint navigation course with one electrical tape waypoint in each of its four quadrants.· These electrical tape waypoints are 3 inches in diameter with 1-inch holes in the centers.· The placement of each waypoint is randomly selected and announced fifteen minutes before the start of the contest.· The contestant teams then have 15 minutes to modify their Boe-Bot's programs and/or configuration settings before the contest begins.··
·
The contestant Boe-Bot must start at the black electrical tape start/end square in the bottom-center of the figure, visit each waypoint, and get back to the start marker.· Points are awarded for speed, accuracy, and a good parking job at the end of the course.·
·
The contest can be held at four different difficulty levels.· Each difficulty level is explained in detail in the Contest Rules for Levels 1 to 4 section.
·

Course Construction
The course design is very inexpensive and easy to put together.· The construction materials are also very common and easy to obtain.· These features minimize expenses incurred by the host school or club.· It also makes it easy for every contestant to replicate the course and test and optimize their Boe-Bot's performance before the contest.· The courses take minimal space to store between uses, and they are inexpensive enough that they can be disposed of by contestants who have completed prototyping as well as by a hosts after a contests·are over.
Suggested Construction Materials
········· (4) white 28 x 22 inch 10 lb poster board.·
·Note: 10-packs are available from Staples for under $4.
········· (1) Roll of 1/2 or 3/4 inch black vinyl electrical tape
········· (1) Roll of wax paper
········· (1) Roll of Scotch tape
········· (1) Roll of clear 2.2 mil, 3-inch wide packaging tape
········· (1) Roll of Scotch double sided removable tape (optional)
Assembling the Course
Keep in mind that this should be done by any contestant or group that will be participating in the contest for prototyping and testing.· The host group or school should have extra courses and electrical tape waypoints and start/end squares on hand.·
·
Ö······· Find a surface that's hard, smooth, clean, flat, and larger than the course.· Smooth tile and wood floors typically work well.·
Ö······· Poster board typically has a shiny side and a matte side.· Lay four poster boards face (shiny side) down.
Ö······· Place their edges against each other to form the four quadrants shown in Figure 1-1.
Ö······· Place scotch tape across the seams every few inches to hold the pieces together.
Ö······· Remove 10-inch strips of packaging tape from the roll, and carefully place them lengthwise along all the seams.· When you are done, the seams should be completely covered with the packaging tape.
Ö······· When you turn the course over, it should lay perfectly flat on the surface, no bows or overlapping seams should be visible.
Ö······· Cut several 4-inch pieces of electrical tape off the roll, and hang them somewhere for a few minutes to give them a chance to regain their shape.· (Removing electrical tape from the roll stretches it.)
Ö······· Place the electrical tape strips edge to edge on a sheet of wax paper.· The edges should overlap slightly (1/8"), and when you are done with this step, you should have an electrical tape square (or rectangle) that is at least 4" x· 4".
Ö······· Make a total of four of the 4" x 4" electrical tape squares on wax paper.
Ö······· Use a scissors, and carefully cut each electrical tape square into a 3-inch wide circle with a 1 inch wide hole in the center.·
You should now have four electrical tape waypoint stickers.· When the coordinates are announced, the referee peals off the wax paper and affixes·each electrical tape waypoint sticker·to the shiny side of the poster board course.·
Ö······· Repeat this process for the 6 x 6 inch starting square.
Ö······· Repeat this process for a second 6 x 6 inch starting square if you are doing level 3 or 4.
Ö······· Use a compass to orient the course to magnetic north as shown in Figure 1-1.·
Ö······· Affix the course to the surface with double sided removable scotch tape.
Contest Rules for Levels 1 to 4
This contest can be performed at any one of the four difficulty levels listed below.· Each successive level builds on the previous one with additional tasks and increasingly difficult challenges.·
·
Level 1: Basic Navigation
Level 2: Marking where the Boe-Bot Has Been
Level 3: Dead Reckoning Relay
Level 4: Advanced Relay
·
Since students are given 15 minutes to configure their Boe-Bots after the course is announced, it is the referee's responsibility to make sure that all work is stopped after the 15 minutes is up.· While Boe-Bots are navigating the contest, no contestant should be operating any type of electronic equipment.· Any participants caught operating equipment that interferes with a Boe-Bot's navigation or communication functions during the contest will be disqualified.· If the particpants are members of a contestant-group, the entire group will be disqualified.
Regarding random waypoint selections, the possible absolute values of each waypoint's x coordinate center·should range from 2 to 26.· Likewise, the y coordinates should range from 2 to 20.
Level 1: Basic Navigation
The Boe-Bot has to get to each waypoint and then back to the starting square in the bottom-center of the course.· Points are awarded for arrival at each waypoint, and speed of course completion.· Extra points are awarded to a Boe-Bot that reports its arrival at a waypoint while pointing inside the doughnut's 1" white center with an extension from its chassis.· Extra points are also awarded for a good parking job at the end of the course.·
Point Awards·
For course completion, the Boe-Bot must have either touched or passed some part of its chassis or wheels over each waypoint and announcing that it is parked over the start/end square with at least some part of its chassis (or a wheel touching it).
·
The Boe-Bot must announce its arrival at a waypoint by playing an audible beep (recommended 4 kHz, for 1/10 of a second) and turn an LED on for at least the duration of the beep and at most 1 second.· Multiple beeps and LED on signal times must be at least 1/10 of a second apart.
·
Points are awarded at each waypoint for the following:
Points···· Task
10 ·········· Some part of the Boe-Bot passes over a waypoint.
10 ·········· Boe-Bot points inside·a waypoint's 1" center with an extension from its chassis as it announces arrival at the waypoint.
4············ Beeping the number of ·times that indicates the quadrant the waypoint is in.
4············ Correctly signalling the waypoint's quadrant number in binary with LEDs.
·
Extra points are awarded for course completion times as follows:
Points···· Task
50 ·········· Fastest course completion
40··········· Second fastest course completion
30 ·········· Third fastest course completion
20··········· Forth fastest course completion
10··········· Course completion
·
Exra points are also awarded for a good parking job, and points can be taken away for leaving the course.
Points···· Task
35··········· Parking within the start/end square before announcing course completion.· 5 points are deducted from this bonus for each square inch of Boe-Bot that is not over the start/end square.
·
−20········· Any part of the Boe-Bot leaving the course by more than 1 inch.· If a waypoint happens to be placed at the edge of the course, this can lead to unanticipated penalties for some contestants.
Level 2: Marking the Waypoints
Points are awarded for completing level-1 tasks.· Additional points are awarded based on how accurately the Boe-Bot can place a mark in the white center of each waypoint ring.· Bonus points are awarded for printing the quadrant number in the center of each waypoint.
·
1-inch diameter white paper circles should be affixed to the center of each waypoint with double-sided removable Scotch tape before each contestant Boe-Bot makes its run.
·
Points···· Task
3 ··········· 3 points are awarded for each 1/8" toward the center from the edge of the 1" inner circle.· This allows 21 points for a mark within 1/8" from the exact center.· The part of the mark furthest from the center of the circle will be considered its location.
15··········· Printing the quadrant number inside the 1-inch waypoint center instead of just leaving a mark.
Level 3: Waypoint Relay
A second Boe-Bot, which is submitted to contest judges before the coordinates are announced, is placed behind the first Boe-Bot just outside the course by the contest referee.· For this contest, a second 6 x 6 inch starting pad is connected to the south of the existing pad.· When the first Boe-Bot returns to the starting pad, the goal is to have it transmit the coordinates to the second Boe-Bot then get out of the way so that the second Boe-Bot can navigate the course with the coordinates it received.· The second Boe-Bot may not start its run until after the first Boe-Bot has announced its arrival at the start/end square.·
·
Points
Points are awarded for all level 1 and 2 tasks for each Boe-Bot.· Fastest course completions are awarded for each Boe-Bot, making it possible for a team to accumulate twice the fast course completion points of a level 1 or·2 competition.· For parking points, each Boe-Bot must occupy the same start/end square it started on.
Level 4: Advanced Waypoint Relay
The announced positions of the waypoints will only be accurate to +/- 6 inches.· The errors of each waypoint location will be randomly drawn, but not announced until the contest has begun (and all Boe-Bot programming and configuring has stopped).· The final position of each waypoint is still restricted to an absolute value range of 2 to 26 for the x-axis and 2 to 20 for the y-axis.·
·
Points
Points for all level 1, 2 and 3 tasks are awarded. ·Fastest course completions are awarded for each Boe-Bot.
Equipment Possibilities and Suggested Reading
This section has a list of equipment and documents that can be used to help contestants outfit their Boe-Bots and learn the necessary skills to complete the contest at its various levels.
Equipment Possibilities
There are lots of different sensors, actuators, and techniques that can help increase a robot's speed and accuracy in this contest.· Figuring out the optimal sensor and actuator set and program is up to each contestant.· Below is a list of equipment that can be used in this contest.· Contestants are not restricted to this list, and may also choose other equipment not listed here.
·
The equipment will have to be chosen based on the contest level.· For example, communication equipment is not necessary if the contestant will not be competing beyond level 2.·
·
The equipment will also have to be chosen based on the contestant's predictions of what will be most effective.· One·contestant might rely on both encoders and a digital compass module for more accurate navigation, while another·contestant might rely entirely on tuned servos and increased servo supply voltages for speed.·
·
Some categories are more conducive to equipment mixing and matching than others.· For example, redundant communication systems are probably not necessary.· On the other hand, different sensors can be used for early detection of a waypoint and fine tuning the Boe-Bot's position over it.
Robot
········· Boe-Bot Robot Kit
Waypoint Detection
········· QTI Line Follower AppKit for the Boe-Bot
········· Boe-Bot Robot Kit IR Transmitter Assembly Kit and Infrared Receiver
········· Photoresistor(s) + Bright Blue LED(s)
Marking Waypoints
········· Parallax Standard Servo + pen
········· 96 dpi Serial Inkjet Printer Kit
Navigation
········· Hitachi HM55B Compass Module
········· Boe-Bot Digital Encoder Kit
········· Encoding with QTI Sensors
Communication
········· Boe-Bot Robot Kit IR Transmitter Assembly Kit and Infrared Receiver
········· Parallax 433 MHz RF Transmitter and Receiver
········· EmbeddedBlue Transceiver AppMod
Documents
As a minimum, all contestants should be familiar with the following:
········· Robotics with the Boe-Bot v2.2 ·(pdf 4.26 MB) (included in Boe-Bot Robot Kit.)
········· Product documentation for the sensors and modules used on the Boe-Bot
Documents with Easter Eggs·
Tips on how to get certain jobs done can come from unexpected sources.· Here are a few examples:
Navigation
········· Scan for and Go to Closest Object
Communication
········· A Tilt Radio Control for Your Boe-Bot
········· Ir Remote with the Boe-Bot
Post Edited (Andy Lindsay (Parallax)) : 6/13/2006 6:52:01 PM GMT
·
Many factory delivery robots rely on lines painted on the floor, hidden wires, or even tracks to show them the way to their next deliveries.· On the other hand, there are lots of other robots that have much less to go on.· The Mars Rover, for example, gets radio instructions from earth that tell it where to go and what to do, and it has to carry out those instructions as precisely as it can.· No human had the luxury of visiting the Martian·landscape before designing this robot.· Even so, the robot far exceeded the designers' and builders' expectations.·
·
A little closer to home, the military sponsored 2005 DARPA Grand Challenge offered a $2-million prize purse to the first vehicle to successfully complete a 132 mile outdoor course.· Global Positioning System (GPS) waypoints were supplied to the contestants, and it was their job to design vehicles that could navigate by these waypoints.· In 2005, several vehicles were able to complete the course.· A year·earlier, at the first Grand Challenge, groups of engineers, students, military contractors and private individuals all discovered how difficult and technically challenging this contest is when the best vehicle only managed to travel seven miles into the course.· The 2007 challenge will be·a 60-mile·urban course.
·
Another robot that uses waypoint navigation is the machine that places the chips on each BASIC Stamp module.· It's called a pick and place machine, and it uses machine vision to find dots on the edges of a panel of BASIC Stamp modules to tune the position of its picking and placing head.· Although the coordinates of each chip location are pre-programmed into the machine, it still has to use machine vision to find the pads each chip goes onto and line up its pins with those pads as it precisely places the part.
·
The Boe-Bot waypoint navigation contest is quite simple compared to these other more sophisticated robots and the tasks they have to accomplish.· Even so, it will give beginning robot designers a glimpse into the myriad of challenges the people who designed and build the more sophisticated robots faced with.· These challenges include figuring out what kind of equipment will give the contestant's Boe-Bot a competitive edge, testing and tuning the equipment, and in some cases,·scrapping or updating certain pieces of equipment that don't' do the job as well as expected.· Mechanical, circuit, and software (PBASIC program) designs will also play a very important role in each contestant robot's performance, as they do with the Mars Rover, the DARPA challenge vehicles, and the pick and place machine in the Parallax manufacturing area.
Contest Overview
These contests may be held by a single class or club, or with groups competing against each other from different classes, clubs, schools or regions.·
·
Figure 1-1 shows the basic Boe-Bot waypoint navigation course with one electrical tape waypoint in each of its four quadrants.· These electrical tape waypoints are 3 inches in diameter with 1-inch holes in the centers.· The placement of each waypoint is randomly selected and announced fifteen minutes before the start of the contest.· The contestant teams then have 15 minutes to modify their Boe-Bot's programs and/or configuration settings before the contest begins.··
·
The contestant Boe-Bot must start at the black electrical tape start/end square in the bottom-center of the figure, visit each waypoint, and get back to the start marker.· Points are awarded for speed, accuracy, and a good parking job at the end of the course.·
·
The contest can be held at four different difficulty levels.· Each difficulty level is explained in detail in the Contest Rules for Levels 1 to 4 section.
·
Course Construction
The course design is very inexpensive and easy to put together.· The construction materials are also very common and easy to obtain.· These features minimize expenses incurred by the host school or club.· It also makes it easy for every contestant to replicate the course and test and optimize their Boe-Bot's performance before the contest.· The courses take minimal space to store between uses, and they are inexpensive enough that they can be disposed of by contestants who have completed prototyping as well as by a hosts after a contests·are over.
Suggested Construction Materials
········· (4) white 28 x 22 inch 10 lb poster board.·
·Note: 10-packs are available from Staples for under $4.
········· (1) Roll of 1/2 or 3/4 inch black vinyl electrical tape
········· (1) Roll of wax paper
········· (1) Roll of Scotch tape
········· (1) Roll of clear 2.2 mil, 3-inch wide packaging tape
········· (1) Roll of Scotch double sided removable tape (optional)
Assembling the Course
Keep in mind that this should be done by any contestant or group that will be participating in the contest for prototyping and testing.· The host group or school should have extra courses and electrical tape waypoints and start/end squares on hand.·
·
Ö······· Find a surface that's hard, smooth, clean, flat, and larger than the course.· Smooth tile and wood floors typically work well.·
Ö······· Poster board typically has a shiny side and a matte side.· Lay four poster boards face (shiny side) down.
Ö······· Place their edges against each other to form the four quadrants shown in Figure 1-1.
Ö······· Place scotch tape across the seams every few inches to hold the pieces together.
Ö······· Remove 10-inch strips of packaging tape from the roll, and carefully place them lengthwise along all the seams.· When you are done, the seams should be completely covered with the packaging tape.
Ö······· When you turn the course over, it should lay perfectly flat on the surface, no bows or overlapping seams should be visible.
Ö······· Cut several 4-inch pieces of electrical tape off the roll, and hang them somewhere for a few minutes to give them a chance to regain their shape.· (Removing electrical tape from the roll stretches it.)
Ö······· Place the electrical tape strips edge to edge on a sheet of wax paper.· The edges should overlap slightly (1/8"), and when you are done with this step, you should have an electrical tape square (or rectangle) that is at least 4" x· 4".
Ö······· Make a total of four of the 4" x 4" electrical tape squares on wax paper.
Ö······· Use a scissors, and carefully cut each electrical tape square into a 3-inch wide circle with a 1 inch wide hole in the center.·
You should now have four electrical tape waypoint stickers.· When the coordinates are announced, the referee peals off the wax paper and affixes·each electrical tape waypoint sticker·to the shiny side of the poster board course.·
Ö······· Repeat this process for the 6 x 6 inch starting square.
Ö······· Repeat this process for a second 6 x 6 inch starting square if you are doing level 3 or 4.
Ö······· Use a compass to orient the course to magnetic north as shown in Figure 1-1.·
Ö······· Affix the course to the surface with double sided removable scotch tape.
Contest Rules for Levels 1 to 4
This contest can be performed at any one of the four difficulty levels listed below.· Each successive level builds on the previous one with additional tasks and increasingly difficult challenges.·
·
Level 1: Basic Navigation
Level 2: Marking where the Boe-Bot Has Been
Level 3: Dead Reckoning Relay
Level 4: Advanced Relay
·
Since students are given 15 minutes to configure their Boe-Bots after the course is announced, it is the referee's responsibility to make sure that all work is stopped after the 15 minutes is up.· While Boe-Bots are navigating the contest, no contestant should be operating any type of electronic equipment.· Any participants caught operating equipment that interferes with a Boe-Bot's navigation or communication functions during the contest will be disqualified.· If the particpants are members of a contestant-group, the entire group will be disqualified.
Regarding random waypoint selections, the possible absolute values of each waypoint's x coordinate center·should range from 2 to 26.· Likewise, the y coordinates should range from 2 to 20.
Level 1: Basic Navigation
The Boe-Bot has to get to each waypoint and then back to the starting square in the bottom-center of the course.· Points are awarded for arrival at each waypoint, and speed of course completion.· Extra points are awarded to a Boe-Bot that reports its arrival at a waypoint while pointing inside the doughnut's 1" white center with an extension from its chassis.· Extra points are also awarded for a good parking job at the end of the course.·
Point Awards·
For course completion, the Boe-Bot must have either touched or passed some part of its chassis or wheels over each waypoint and announcing that it is parked over the start/end square with at least some part of its chassis (or a wheel touching it).
·
The Boe-Bot must announce its arrival at a waypoint by playing an audible beep (recommended 4 kHz, for 1/10 of a second) and turn an LED on for at least the duration of the beep and at most 1 second.· Multiple beeps and LED on signal times must be at least 1/10 of a second apart.
·
Points are awarded at each waypoint for the following:
Points···· Task
10 ·········· Some part of the Boe-Bot passes over a waypoint.
10 ·········· Boe-Bot points inside·a waypoint's 1" center with an extension from its chassis as it announces arrival at the waypoint.
4············ Beeping the number of ·times that indicates the quadrant the waypoint is in.
4············ Correctly signalling the waypoint's quadrant number in binary with LEDs.
·
Extra points are awarded for course completion times as follows:
Points···· Task
50 ·········· Fastest course completion
40··········· Second fastest course completion
30 ·········· Third fastest course completion
20··········· Forth fastest course completion
10··········· Course completion
·
Exra points are also awarded for a good parking job, and points can be taken away for leaving the course.
Points···· Task
35··········· Parking within the start/end square before announcing course completion.· 5 points are deducted from this bonus for each square inch of Boe-Bot that is not over the start/end square.
·
−20········· Any part of the Boe-Bot leaving the course by more than 1 inch.· If a waypoint happens to be placed at the edge of the course, this can lead to unanticipated penalties for some contestants.
Level 2: Marking the Waypoints
Points are awarded for completing level-1 tasks.· Additional points are awarded based on how accurately the Boe-Bot can place a mark in the white center of each waypoint ring.· Bonus points are awarded for printing the quadrant number in the center of each waypoint.
·
1-inch diameter white paper circles should be affixed to the center of each waypoint with double-sided removable Scotch tape before each contestant Boe-Bot makes its run.
·
Points···· Task
3 ··········· 3 points are awarded for each 1/8" toward the center from the edge of the 1" inner circle.· This allows 21 points for a mark within 1/8" from the exact center.· The part of the mark furthest from the center of the circle will be considered its location.
15··········· Printing the quadrant number inside the 1-inch waypoint center instead of just leaving a mark.
Level 3: Waypoint Relay
A second Boe-Bot, which is submitted to contest judges before the coordinates are announced, is placed behind the first Boe-Bot just outside the course by the contest referee.· For this contest, a second 6 x 6 inch starting pad is connected to the south of the existing pad.· When the first Boe-Bot returns to the starting pad, the goal is to have it transmit the coordinates to the second Boe-Bot then get out of the way so that the second Boe-Bot can navigate the course with the coordinates it received.· The second Boe-Bot may not start its run until after the first Boe-Bot has announced its arrival at the start/end square.·
·
Points
Points are awarded for all level 1 and 2 tasks for each Boe-Bot.· Fastest course completions are awarded for each Boe-Bot, making it possible for a team to accumulate twice the fast course completion points of a level 1 or·2 competition.· For parking points, each Boe-Bot must occupy the same start/end square it started on.
Level 4: Advanced Waypoint Relay
The announced positions of the waypoints will only be accurate to +/- 6 inches.· The errors of each waypoint location will be randomly drawn, but not announced until the contest has begun (and all Boe-Bot programming and configuring has stopped).· The final position of each waypoint is still restricted to an absolute value range of 2 to 26 for the x-axis and 2 to 20 for the y-axis.·
·
Points
Points for all level 1, 2 and 3 tasks are awarded. ·Fastest course completions are awarded for each Boe-Bot.
Equipment Possibilities and Suggested Reading
This section has a list of equipment and documents that can be used to help contestants outfit their Boe-Bots and learn the necessary skills to complete the contest at its various levels.
Equipment Possibilities
There are lots of different sensors, actuators, and techniques that can help increase a robot's speed and accuracy in this contest.· Figuring out the optimal sensor and actuator set and program is up to each contestant.· Below is a list of equipment that can be used in this contest.· Contestants are not restricted to this list, and may also choose other equipment not listed here.
·
The equipment will have to be chosen based on the contest level.· For example, communication equipment is not necessary if the contestant will not be competing beyond level 2.·
·
The equipment will also have to be chosen based on the contestant's predictions of what will be most effective.· One·contestant might rely on both encoders and a digital compass module for more accurate navigation, while another·contestant might rely entirely on tuned servos and increased servo supply voltages for speed.·
·
Some categories are more conducive to equipment mixing and matching than others.· For example, redundant communication systems are probably not necessary.· On the other hand, different sensors can be used for early detection of a waypoint and fine tuning the Boe-Bot's position over it.
Robot
········· Boe-Bot Robot Kit
Waypoint Detection
········· QTI Line Follower AppKit for the Boe-Bot
········· Boe-Bot Robot Kit IR Transmitter Assembly Kit and Infrared Receiver
········· Photoresistor(s) + Bright Blue LED(s)
Marking Waypoints
········· Parallax Standard Servo + pen
········· 96 dpi Serial Inkjet Printer Kit
Navigation
········· Hitachi HM55B Compass Module
········· Boe-Bot Digital Encoder Kit
········· Encoding with QTI Sensors
Communication
········· Boe-Bot Robot Kit IR Transmitter Assembly Kit and Infrared Receiver
········· Parallax 433 MHz RF Transmitter and Receiver
········· EmbeddedBlue Transceiver AppMod
Documents
As a minimum, all contestants should be familiar with the following:
········· Robotics with the Boe-Bot v2.2 ·(pdf 4.26 MB) (included in Boe-Bot Robot Kit.)
········· Product documentation for the sensors and modules used on the Boe-Bot
Documents with Easter Eggs·
Tips on how to get certain jobs done can come from unexpected sources.· Here are a few examples:
Navigation
········· Scan for and Go to Closest Object
Communication
········· A Tilt Radio Control for Your Boe-Bot
········· Ir Remote with the Boe-Bot
Post Edited (Andy Lindsay (Parallax)) : 6/13/2006 6:52:01 PM GMT
619 x 538 - 62K
637 x 579 - 27K