

using GP1A30R (Sharp )

Hello,
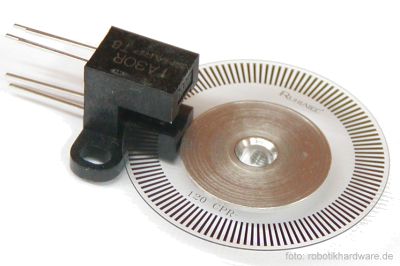
I would like to design and program an omniwheel robot with 3 wheels in 120° positions using GP1A30R (Sharp -positions Photointerrupter with Endcoder Function (see attachment)), BOE/BS2, and 3 PING)))Ultrasonic Range Finder.
I would like to make and program a wheel encoder and for this I need a little bit help from you.
I don´t know about the implementation
I would be nice from you if you could send me a short program example (BS2) and connection to my BOE or Parallax Servo Controller ( I mine an example simple circuit or illustration)
I am very content with the products of Parallax ( BOE, Parallax Servo Controller and and 3 PING)))Ultrasonic Range Finder (I designed and program a robot with 6 legs and 2 PING Sensors - HEXAPOD)
Thank you for the support and I would like to apologize for my bad English
Yours sincerely
Klaus Gawelczyk
Stuttgart/Germany
I would like to design and program an omniwheel robot with 3 wheels in 120° positions using GP1A30R (Sharp -positions Photointerrupter with Endcoder Function (see attachment)), BOE/BS2, and 3 PING)))Ultrasonic Range Finder.
I would like to make and program a wheel encoder and for this I need a little bit help from you.
I don´t know about the implementation
I would be nice from you if you could send me a short program example (BS2) and connection to my BOE or Parallax Servo Controller ( I mine an example simple circuit or illustration)
I am very content with the products of Parallax ( BOE, Parallax Servo Controller and and 3 PING)))Ultrasonic Range Finder (I designed and program a robot with 6 legs and 2 PING Sensors - HEXAPOD)
Thank you for the support and I would like to apologize for my bad English
Yours sincerely
Klaus Gawelczyk
Stuttgart/Germany
400 x 266 - 16K
pdf
77K