

VeX THIS!!! (a VeX/Parallax Hybrid has been started!)

Well I am VEXed, Book-2!
Okay, Despite what IFI (Inovation First, Inc.) says, yes, you CAN make a Parallax/VEX Hybrid.
I just drove a VEX servo full scale, through 256hz to 1256 Hz., with a homework board.
Now, drawback, the servo did, indeed need a higher voltage to run. So..
VEX Motor/Servo pin-out: W O B
|| |
key || |
| | | White = Signal
| | | Orange= V+ (Vin)
| | | Black = GND (Vss)
| | +--Vss
220ohm | +---Vin
P0|=>
/\/\/\
+
I imagine, IF fed from the Vdd pins on the Board Of Education, because of the outboard LM7805, the servo may
run just fine, because the regulator on the Homework board is too small, and can't handle the load of the servo.
The servo moves fairly rapid. and I imagine +9V is WAY too high. (will need to get a 7805 to see if this is true.)
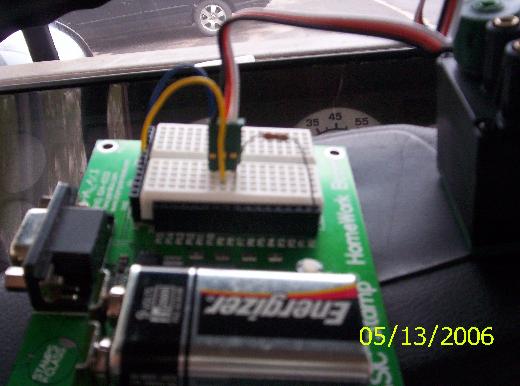
But, it works!! and, yes, You do notice a new reset button on the board. Somehow, one of the tabs on the
old switch broke off, and I lost the top & disc from the reset, so.. unsoldered the old switch, and tacked-on
a new one.
The other drawback, with the VEX motors & servos. is the short, Unsecured square shaft.
You're limited by needing some of the VEX hardware to be driven off the servo or motor.
My Geo-Crawler is almost completed, and now, the BS2 looks more like a viable source for GPS interfacing.
(haven't figured all details of trying to connect the ETrex to the VEX controller.)
(my Geo-Crawler, is supposed to be a Semi-Autonomous 'tank-crawler' that will use a Garmin ETrex, to
locate certain Lat/Lon positions, where people have hidden 'GeoCaches' (small hidden treasure).)
Stephen (gelfling6)
Okay, Despite what IFI (Inovation First, Inc.) says, yes, you CAN make a Parallax/VEX Hybrid.
I just drove a VEX servo full scale, through 256hz to 1256 Hz., with a homework board.
Now, drawback, the servo did, indeed need a higher voltage to run. So..
VEX Motor/Servo pin-out: W O B
|| |
key || |
| | | White = Signal
| | | Orange= V+ (Vin)
| | | Black = GND (Vss)
| | +--Vss
220ohm | +---Vin
P0|=>
/\/\/\
+
I imagine, IF fed from the Vdd pins on the Board Of Education, because of the outboard LM7805, the servo may
run just fine, because the regulator on the Homework board is too small, and can't handle the load of the servo.
The servo moves fairly rapid. and I imagine +9V is WAY too high. (will need to get a 7805 to see if this is true.)
But, it works!! and, yes, You do notice a new reset button on the board. Somehow, one of the tabs on the
old switch broke off, and I lost the top & disc from the reset, so.. unsoldered the old switch, and tacked-on
a new one.
The other drawback, with the VEX motors & servos. is the short, Unsecured square shaft.
You're limited by needing some of the VEX hardware to be driven off the servo or motor.
My Geo-Crawler is almost completed, and now, the BS2 looks more like a viable source for GPS interfacing.
(haven't figured all details of trying to connect the ETrex to the VEX controller.)
(my Geo-Crawler, is supposed to be a Semi-Autonomous 'tank-crawler' that will use a Garmin ETrex, to
locate certain Lat/Lon positions, where people have hidden 'GeoCaches' (small hidden treasure).)
Stephen (gelfling6)

521 x 386 - 46K
520 x 386 - 40K
Comments
I would not stretch it over 7.2 volts since that is what the VEX battery is made for...
Both the motor and servo is working fine with the BOE, I'm working on·a tank-bot with VEX parts and the BOE...
Guess I need to find my camera and post a picture...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Living on the planet Earth might be expensive but it includes a free trip around the sun every year...
Experience level:
[noparse][[/noparse] ] Let's connect the motor to pin 1, it's a 6V motor so it should be fine.
[noparse][[/noparse] ] OK, I got my resistors hooked up with the LEDs.
[noparse][[/noparse]X] I got the Motor hooked up with the H-bridge and the 555 is supplying the PWM.
[noparse][[/noparse] ] Now, if I can only program the BOE-BOT to interface with he Flux Capacitor.
[noparse][[/noparse] ] I dream in SX28 assembler...
/Bamse
Ryan
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Ryan Clarke
Parallax Tech Support
RClarke@Parallax.com
Needless to say I didn't understand the stereo type that you could only use VEX robot products.· This way of thinking stifles creativity
in my opinion.· My understanding is that each team is given a "goodie" bag of various pre-made robotic parts that they are to use in
their final design. (<-again this stifles creativity)· As a result most of the designs end up looking very similar to each other.· This
aspect didn't do much for me, I was hoping for much more of a variety of robots to truly appreciate the creative talents I believe were
present at the contest.· What a shame, my 3 1/2 year old daughter was with me ( quite the tom-boy ; loves robots and trains, won't touch
a doll) Even she was disappointed and even made comment "daddy we've already seen this one, let’s go somewhere else".· This coming
from someone who will watch a "robot video clip" over and over and over again.· She especially likes robo-rats.
FRC (First Robotic Challenge)
FLL (First Lego League)
FVC (First Vex Challenge)
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Beau Schwabe
IC Layout Engineer
Parallax, Inc.
Post Edited (Beau Schwabe (Parallax)) : 5/16/2006 3:28:51 PM GMT
stifled, with most of the posts in the forum, coming from just ONE tech from IFI, and Almost
ALL forums, locked, and unable to post a reply. (even to ones, where if you read the answer,
the tech made an error.. You can't make a follow-up.)
The servos & motors are fairly generic, with just the add-on 2-post mount, and the close-quarters
socket for the drive clutch. (which, itself, the spring seems too strong.. If I turned a jammed
servo, it would chew the internal gears to death 1st, before the clutch released.)
If you were down in Atlanta, I hope you got to see some of the beginning teams on the Newton
playing field.. (Specificly, Team 1124, the Avon Uberbots.. I hoped their final design
worked better than it's 1st incarnation, and as well as it did at the regional here in Ct.)
Okay, I wanted to show-off the 1st version of the Geo-Crawler to one of the team members,
while doing the late bus run, so I left the base VEX robot w/tank treads on the engine cover of the
bus. (I drive a schoolbus, incase everyone else hasn't caught on.).. then, went to turn into the high school..
Down it went into the stairwell.. the frame bent, and it snapped one of the tank tracks.
Never do this one again!
needed to be replaced. went to pick up the kids, and Keith (the robotics team member) saw the mess..
Oh-well.. I replaced the track when I got home, and finishedd fixing the bent plates & frame.
I also needed to replace all 4 long screws for the servo. One, the head snapped off.. and, when I went to
remove the servos, the hex head stripped-out (from a hex, to a circle!)
Found out, Never build the 'SquareBot' design in the manual, then run it outside on grass..
Mucks-up the gears! (to say nothing of the mud & dirt the drive gear picks-up. so close to the ground,
what were they (and I ) thinking?)
I'm thinking of finding an old dial phone, and pull the RJ connectors from the handset & phone, to
see if I can decipher the RC reciever.. just need to figure out which pin is which, then feed the
data & clock streams to a BS2.
next step, once the Robot is stable (body wise) will be connecting, and programming the
BOE board. Already making a Molex to coaxial adaptor, to run the BOE off the VEX battery.
Stephen (gelfling6)
Took a while to find all the parts for my camera...
Yeah, it's really that old...
Here is my VEX-BOE-Tankbot or whatever it is...
Notice the "Expansion board" mounted on the sensor platform...
The motors works just like ordinary RC servos (Black = Vss, Orange = Vdd and White is the Pulse (1-2ms))...
The limit switches can be seen as pushbuttons that shorts black and white during contact, I don't know if red is connected or not...
Anyhow, time to order some sensors (from Parallax) to put on my "Expansion board"...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Living on the planet Earth might be expensive but it includes a free trip around the sun every year...
Experience level:
[noparse][[/noparse] ] Let's connect the motor to pin 1, it's a 6V motor so it should be fine.
[noparse][[/noparse] ] OK, I got my resistors hooked up with the LEDs.
[noparse][[/noparse]X] I got the Motor hooked up with the H-bridge and the 555 is supplying the PWM.
[noparse][[/noparse] ] Now, if I can only program the BOE-BOT to interface with he Flux Capacitor.
[noparse][[/noparse] ] I dream in SX28 assembler...
/Bamse
No, the red wire is usually open, or Vdd, for the ones that use it. found this out with a damaged bumper switch.
(the white wire, & copper trace ripped from the board, and the wire goes through the board!)
Okay.. Here's an intersting question to put to the techs at Parallax...
The VEX ultrasonic range sensor, is comprised of 2 devices, and 2 wire sets (3-wire).. the device comes with NO
sample code, which you must get off their website, and actually, it IS included with the programming kit,
but only in bare minimum. It is supposed to use two interupt ports of the VEX controller, but is very vague..
How does this concept, compare to the PING? is the PING connected in similar fashion?
If yes, Bamse, If you can track-down one range finder, there goes an add-on for your scanning platform.
If anything, trying to find parts for these, is also turning into a major scavenger hunt. RS must indeed, be planning on
discontinuing the whole shooting match. I already faced-down one baracuda manager, and told him point-blank,
"when I said I was looking, I ment I was looking! But, since you decide to continue an "assault sales pitch", you just lost
any possible sale.. Good day!", and walked out. Sorry.. I'm just not a hard-sell kind of customer.
BTW, I LOVE the breadboard! Always leave room for expansion!
Stephen (gelfling6)
I don't have the VEX Programming kit and I don't think I'll get it either...
I was more thinking of the PING actually...
Unless VEX let us know the specifications I'm not going to try VEX Ultrasonic sensor...
However I do need some parts from Digikey so I think I will try out the Sharp GP2Y0D21YK (Digikey Part 425-1168-ND), hopefully it will fit the sensor server...
The RS store here in Tyler, TX seem to be OK, if I tell them I'm just looking, they leave me alone...
However, if I buy anything, they'll ask me if I need a new cell-phone with that, kind of annoying...
This weekend I'll hopefully be able to make a small platfor to mount the BOE, it's lying loose on the bot right now so I'll guess it's just a question of time before it will get caught in the tracks...
By the way, I was looking for the connectors for the VEX battery so I could hook it up to the BOE and it looks like it is Digikey WM2308-ND and WM2311-ND...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Living on the planet Earth might be expensive but it includes a free trip around the sun every year...
Experience level:
[noparse][[/noparse] ] Let's connect the motor to pin 1, it's a 6V motor so it should be fine.
[noparse][[/noparse] ] OK, I got my resistors hooked up with the LEDs.
[noparse][[/noparse]X] I got the Motor hooked up with the H-bridge and the 555 is supplying the PWM.
[noparse][[/noparse] ] Now, if I can only program the BOE-BOT to interface with he Flux Capacitor.
[noparse][[/noparse] ] I dream in SX28 assembler...
/Bamse
Ironicly, I think RS does have it.. Look in the section with RC batteries, I think they have the Molex connector, in raw,
and with wires pre-attached. (fairly sure on the pre-attached, I made a pair of aligator clip adaptors, for a battery charger,
and found the female end, fits the VEX battery pack. (see attached photos) and, being NiMH, as well as the NiCad pack,
both fit the charger's female plug as well (sorry, no photo yet.)
Stephen (gelfling6)
(added 05/22-06) and 3rd photo, is exactly what you're looking for.. female pin molex connector, to 'Type M' barrel
connector... Bought the plugs, and the 9.6V repair kit, as I needed to fix the 6-battery VEX module.. (4th photo)
where the V+ wire came un-attached.. (sloppy Crimp job, Guys! )
Center is V+, shield is V-
Post Edited (gelfling6) : 5/22/2006 10:31:07 PM GMT
you still cannot post anything.. (questions, etc.) BUT..... I did find, one little piece
of usable info.. the pin-out of the RX!
the radio reciever, is a simple 4-pin interface..
Pin 1 = +5V
Pin 2 = Data
Pin 3 = GND
Pin 4 = Tether detect. (shorting this to GND, on the transmitter, blocks the transmitter, from another msg.
showing how to wire a multi-pole single through switch to control competitions.)
Data is in a solid stream, of single digits, 0 to 255... So.. here's the fun part....
#1, at what baud rate?
#2, what does each value mean?
#3, can it be interfaced with a BS2? (simple enough, YES! Just have to figure #1 & #2 1st.)
You could probably hack an old RJ14 socket, from an old Bell phone, solder-solidify the wires,
and plug them into the board. +5, would go to Vdd, and the data would be at TTL level.
Someone mentioned, in another discussion, the wrong model for the PIC18 chips..
Both are PIC 18F8520 (not 8452, I seem to remember..)
Despite IFI's & Intelitek's remarks, I believe Microchip DOES make a version of the
MPLAB, which works on a Macintosh. (just, it seems, IFI/Intelitek, Doesn't want to
invest the time/money, IMHO)
I've just finished the drivetrain for the Geo Crawler. so-far, it reacts well with the VEX controller
& TX/RX.. (needed to adjust chain tension, and track tension. (loosened both! had a major
binding problem with the tracks being too tight, and the chain kept skipping off the sprokets.,
then one chain too tight, kept binding. All loose, it runs like a champ!)
Now, next step.. Pulling the VEX controller, and mounting the BOE. I'm gonna have to make some
custom "Z" brackets, to make-up for the mis-allignment between the corner holes of the BOE, and
the perforations in the metal frames.
Stephen (gelfling6)
I was actually going to try and read the signal sent to the servos from the VEX controller with a PULSIN command...
However if we could "crack" the code from the reciever, that would be awesome...
Keep me posted and let me know if there is anything I can do to help...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Living on the planet Earth might be expensive but it includes a free trip around the sun every year...
Experience level:
[noparse][[/noparse] ] Let's connect the motor to pin 1, it's a 6V motor so it should be fine.
[noparse][[/noparse] ] OK, I got my resistors hooked up with the LEDs.
[noparse][[/noparse]X] I got the Motor hooked up with the H-bridge and the 555 is supplying the PWM.
[noparse][[/noparse] ] Now, if I can only program the BOE-BOT to interface with he Flux Capacitor.
[noparse][[/noparse] ] I dream in SX28 assembler...
/Bamse
Will do! The signal sent to the servos, is about the same as the BOE sends to the servos on the BOE-BOT,
Actually, I found the VEX motors are almost identical to the Parallax constant rotation servos, as far as
pulsout ratio.. (173-176 Hz range holds stopped, anything outside down to 90, is full rotation, up to 250 is full.
(and FAST!!!
The servo, has a 100Kohm pot directly under the drive wheel, driven by a odd cam imbedded into the drive wheel.
and it's NOT an easy thing to disassemble. It's held by 2 plastic clips > <-like. and almost as hard re-assembling.
The Motor, has NO adjustment! it's just a plain, simple control chip, and some drive electronics under
the board. I'd venture guess, Not impossible to re-fit into the Parallax servo case, (2 offset screws hold the motor into
the VEX case. and, that odd cam imbedded in the servo, is non-existant. I'd imagine, worse case, you could pull the
cam out, set the servo POT to dead center, and make it into an emergency motor, if it weren't for the tab on the wheel.
(See various documents on converting plain servos into constant rotation.)
I'm planning on getting an RJ14 plug from an old AT&T phone handset, and see if I can solder the wires, and plug them into
the BOE, and do a little remote analyzing of the signal.
Just for laughs, I actually tried to write my 1st program, in Easy-C.. No serialin, no serialout, VEXLABS says the RX & TX
pins on the I/O port side of the controller is supposed to have similar access to the USER 18F8520, like the
programming cable has to the Master 18F8520.. I've yet to find any code that demonstraits how to talk to this.
(to say nothing of it is TTL level.. )
One thing I'd kill, to figure out.. Mad Katz, a maker of all kinds of Sony Playstation, Sega, Nintendo, XBox, etc.. controllers,
makes a 2.4Ghz wireless PS2 controller. The signal is Bi-Directional, via a small postage-stamp sized PC board, with a
pin row.. On both ends! (Identical, in the controller, and the module you plug into the PS2)
I'd love to find out the pin-out! it would make for a wicked 2-way serial between the BOE, and a computer.
It's supposed to be able to transmit back to the controller, as well as the controller to it, to activate the vibration
motors in the controller handles. *sigh!* more to have to look at..
Okay, back into the laboratory (a small workbench I also use to repair computers.)
Stephen (gelfling6)
(quoted from two posts by Ricky Terrence, on vexlabs forums)
Here is pinout for the RX1 or RX2 ports:
Pin 1 - Power +5 volts (the right most pin when looking at the front connector)
Pin 2 - Receiver
Pin 3 - Gnd
Pin 4 - Tether Detect (the left most pin when looking at the front connector)
The pulse width from the RF Receiver is 0.870 – 2.15ms and has a period of 18ms. This
signal will be decoded by the Vex Micro Controller to a value from 0 – 255. The
control signals are TTL levels where as your computers serial port is at 232 levels.
You can damage the Vex Micro Controller if you do not do a level conversion.
----end quote---
At present, I'm trying to connect the VEX reciever, to a homework board, adding an external 7805
regulator, to power the receiver. Objective, is seeing if I can detect a standard serial pattern from
the receiver, and send it back through to the debug output in decimal.
The Geo-Crawler, is taking a little more shape.. (See photos) Adding the ultrasonic range finder,
and two limit switches to the front. (I took your idea for the scanning head, Bamse!)
I just fed it my 1st few programs from their programmer.. Ever seen one of these run amuck?
(It's not pretty!) tried to re-create the demo videos of the PING demo, once in a certain distance,
scan for clearest path, turn to it, then continue. It ran forward, then went into circles.
Stephen (gelfling6)
Also, I don't really understand how you set up the servo on the breadboard, where do u plug it in, Vdd or vin, what do u need the 220 ohm resistor for?
Plug the VEX servo into your breadboard...
Connect Orange to Vdd (or Vin if you are using a battery no more than 7.2 V).
Connect black to Vss.
Connect white to p0.
Then try the following program:
' {$STAMP BS2}
' {$PBASIC 2.5}
Start:
PULSOUT 0, 500
PAUSE 20
GOTO Start
The VEX motor should now turn in one direction, switch 500 to 1000 to reverse direction...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Living on the planet Earth might be expensive but it includes a free trip around the sun every year...
Experience level:
[noparse][[/noparse] ] Let's connect the motor to pin 1, it's a 6V motor so it should be fine.
[noparse][[/noparse] ] OK, I got my resistors hooked up with the LEDs.
[noparse][[/noparse]X] I got the Motor hooked up with the H-bridge and the 555 is supplying the PWM.
[noparse][[/noparse] ] Now, if I can only program the BOE-BOT to interface with he Flux Capacitor.
[noparse][[/noparse] ] I dream in SX28 assembler...
/Bamse
the 220ohm resister was probably overkill, since the homework board is already isolated with 220ohm chip resistors...
Bamse has it right.. orange goes to VDD (+5V, though on the homework board, I highly suggest a 7805 regulator's
output. (and V+ on the 7805 to Vin).), Black to Vss (GND), and the white wire, to your pulse source.
the drawing got clobbered by the way most forums reformat text..
Bamse's driver, is just for 1-way.. I had it going bi-directional..
(hope this appears right, I'm running 8 things on a 512MB 1.113Ghz P-III laptop, and it keeps threatening to go nova!)
Pgm: VEX_This.BS2
'Let's STAMP this VEX!
'A simple test program, to modulate a VEX servo motor, with a
'Parallax Basic Stamp2 Homework Board (or a Board Of Ed)
'By Stephen Griswold (gelfling6@hotmail.com)
'basis: Can IFI/Radioshack VEX servos & motors be controlled by a BS2?
'Answer: YES! and this proves it!
'Pulsout zone values, are approx 256 to 1256 for full travel.
' NOTE! Homework board will need a 7805 regulator to power
' the servo or motor's V+ pin. The On-BS2 regulator cannot handle
' the load. (and +9V is way too high!)
'
' {$STAMP BS2}
' {$PBASIC 2.5}
zone VAR Word 'This is our value area
DO
' Roll from low to high zone.
FOR zone = 256 TO 1256 'Slow, but yes, it will step all 1000 areas.
'Steps of 4 make for 200 positions
DEBUG CRSRXY, 0, 2, DEC4 zone 'display on terminal where we're at.
PULSOUT 0, zone ' I chose Pin0, for the test.
PAUSE 10 'a 10-ms wait state.
NEXT
' Now, roll from high to low zone
FOR zone = 1256 TO 256
DEBUG CRSRXY, 0,2, DEC4 zone
PULSOUT 0, zone
PAUSE 10
NEXT
LOOP 'And do it again.
END
(expect that to get clobbered)
this ran the servo.. You can use the exact same values the Parallax constant-rotation servos
uses, with the VEX motor modules. (650-750-850 range. The VEX 0-127-255 range must add
a value to match the servo's requirements.)
Okay, I may've stubbed some toes, in the Vexlabs forums. saying there should be an open
minded bridge, to allow other items to interface to VEX.. Haven't been there to see if I'm canned, or not.
(saying creating is chief, and isn't one of their slogon terms, "Create"?)
Hope this helps, Zsy6! Stephen (gelfling6)
Thanks.
I thought they were continuous rotation, but they only go 100 degrees, they wont be very useful for motion...
You may be able to modify them for continuous rotation...a google search will turn up many sites with how-to's for modifying servos. The process may be a little different for the VEX servos (I'll have to check on this)-
Ryan
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Ryan Clarke
Parallax Tech Support
RClarke@Parallax.com
Try this....
remove the screws from the top section.. lift off the center step-down gear, and the end drive gear (the one with the square hole)
underneith the end-drive gear, you'll find a whaite plastic insert, looking like a bow-tie, with a slot in the center. remove this piece
(it should be held in by 2 pin-tabs) by 1st prying the bronze bushing out, then grabbing or prying the plastic piece out. then, replace (press-in) the bronze bushing.
Now, using a file, an xacto knife (CAREFULLY!!) or even grabbing with a pair of pliers, on the top of the end drive gear,
is a small tab. (C) <---<<< (note center of C as the top view) file-down, whittle away, or grab & twist the tab, so it
won't block the gear from rotating full-circle.
now! make sure the tab in the center post of the end drive gear spindel, is dead-center (=). (You just did the centering of
the potentiometer)
Final steps, place the end drive gear on, along with the center step-down gears (small gear face downward.)
before replacing the cover & screws, hook it up, and feed it a low-rotation pulse. (about 750 center, so 650 or 850)
this should show if the tab is still there enough to bind things. If not, the end drive gear should rotate 360 degrees.)
Now, finish re-assembling.
as far as I disassembled one of my servos, (all the gears off, 2 screws off the top of the motor, THEN remove the 4 bottom
case screws)
the pot is held by 2 plastic fingers into the case body, with 3 long metal strips feeding up to it.. I imagine, you could un-
solder the pot, and replace it with a PC mount, then drill a hole through the side to adjust. (or, even feed the existing pot's
shaft through a side hole.)
the two top screws of the motor, are tiny! be careful not to lose them! *plink!* OH-RATS!!!
Stephen (gelfling6)
lol
Thanks.
Yeah,
Why am I still single.
I haven't delved too hard into it yet, Daddio.. Right now, It's connected to the VEX controller,
but I imagine, seeing little code to run it, and seeing quite a few minor chips on the board
itself, and, seeing quite a similarity of minimum chips & ransistors to the PING, (Okay, I admit it,
I downloaded the PING specs from here.) the wiring shouldn't be that much off.. Majority of the
VEX modules, are 3-wire, Vss (Gnd) Vdd (+5V) and signal (either input or output).
input is apparently turned on by a signal from one of the digital I/O ports, and the output is fed to
one of the interupts, I'm guessing, to feed the actual echo count.
the subroutine, is locked away in one of the user libraries (and, knowing IFI, next to impossible to decipher.)
and returns a simple 0 to 99 value.. (0 being closest, 99 being within 2-Ft. (1/2-meter. or so.)
I'm half tempted, see what I would get, if I wired the sonar like the PING, and fed it the test program for
the Ping.. It stands to reason, the pulse fed to the digital output, is a clock, and the interupt is simply a count,
and match to what was sent, and the software deciphers how far away.
Mind you, I'm hardly more than a high school graduate, yet, totally geek by my own hands, and learning.
I'm slowly baking my brain, trying to learn ANSI-C, and see if I can write a rudimentary program for the
VEX controller itself., and worse case, link the VEX to either the homework board, or the BOE..
Okay, I may be stubbing toes here..
you would be typing programs directly into the RS-232 port, instead of writing them on a host computer.
Rather, it is tokenized data, fed to the PIC chip on the stamp.. The program on the PC (or mac, or..)
is strictly a compiler. Right?
write the program offline from the host computer, upload & run the compiled program onto the PIC.
I may end-up outboarding the homework board, to the VEX, and re-feed it the test program for the sonar.
then, tap the input & output wires into 2 pins of the BS2, and see what is being generated..
rather than re-invent the wheel, The wheel may already be made. It just may need a different hub to connect
to the axle.
Stephen (gelfling6)
While everyone else is picking your brain, have you figured out the encoders that Vex has.· I see by the documentation, that there are 100 slots in them.· I would like to use them for my Sherline Mill which has .050in per turn of the handle.· There are three wires, red, white, black.· I assume +5v, gnd, signal.·
Just in case· you have used them, I would apprecitate any info you may be able to pass on.
Bill
Sorry, Bill, I haven't.. I was looking at them at a store a few weeks ago, and they almost looked like
a set of wafer switches I pulled from an old Atari 2600 trackball.. (difference being, the ones from
the trackball were SPDT (explained further down) instead, these look like simple on/off ( SPST) shutter
like.. (0101010101 pattern) yes, the majority of the VEX stuff is plain +5, GND, Signal.
the Atari trackball encoders, used a staggered shutter switch, to tell which direction it was turning..
One side would remain 0, while the 2nd turned 0, then the 1st would turn 1, then the 2nd, 0..
00110011001100110011 -side 1
01100110011001100110 -side 2 as they connected to the common pin..
The VEX encoders just send a simple pulse.. Thinking you already know which way it's turning,
just needing to know how far..
Well, It's official.. I STINK at 'C'!
near clone of the BOE-BOT, with a PING, PONGed.. I mean BOMBED!
Along side, I'm also trying to develope the same program, for the BOE... Same problem as
Bamse... Needing to retrofit a mount for the BOE.. I must've botched a condition check
somewhere.. It ignored the auto/manual switching from the remote (monitoring switches on Ch 6
to either run autonimous, or manual control) removing that part of the code, it does the scanning
for a new direction IF it finds an obstruction within 1-foot, but, it always runs backwards.
It seems I also forgot to add a 'STOP!" if it does find an obstruction..
really don't know everything, Zsy6..
Back to the drawingboard!! (and a little more time using pbasic)
Stephen (gelfling6)
And, recap.. My previous note, they are indeed digital encoders.. I broke-down, and bought a pair last week.. But, as I mentioned in the note, they are strictly 1010101010101010... stream.. the +5V powers the IR LED in the pick-up, and the GND common,
and the signal, from the white wire, from the photo transistor, shows a "0" for an open slot in the wheel, and a 1 for a blocked
signal. I am mystified, by why they have a slide-off cover..
I'm baffled even worse, by the line follower modules.. They also have the same wiring.. +5(red) to the IR LED, GND (black), Signal (white) .. no way to retrofit, to do a IR remote.. just simple feedback if the beam of IR is broken.
I need to revisit the VEXLabs page.. Someone made a direct-drive robot, with seriously flexible framing. calling it a rock crawler. Using 4 of the knobby tires, on a pair of rubber-band stabilized axles. I can't remember how the axles were made.. (the motors were mounted on the ends, and the wheels driven directly off the motors.)
I made a alternate pair of driving frames on mine.. The tank tracks on one set, the knobby tires on the other set. and the tires move wicked fast! far too fast for stopping within a foot. time to modify the geocrawler's distance programming.
Blasted wet weather here in the north-east US is getting me a bad case of cabin fever. Hardly any chance to really let the geocrawler out to test-drive.
Stephen
tips I've learned too..
www.vexfan.com
www.botmag.com (has a side discussion about the VEX)
Stephen