

Boe-Bot Automatic Paper Towel Dispenser
 A.C. fishing
Posts: 262
A.C. fishing
Posts: 262
Hi. A project that I've been working on for a while is transforming my Boe-Bot into a automatic paper towel dispenser. (I wish i could show pics, but my camera isn't working). My code, scematic, and model aren't very perfect, because I'm a real begginner, but she works.
How my model functions is place your hand in front of the IRs, and the paper will unravel until you take your hand away, and then it goes back up. I tunned it so when your hand is away, and the unraveled paper towel is down, the boe-bot· only sort-of reconises the paper, and stays put.
Code[noparse]:([/noparse]You can revise it alot)
Scematic- The scematic is the average IR sensing Boe-Bot in the manual and on the front page, but replace the 1k resistors with 3k or 4k resistors
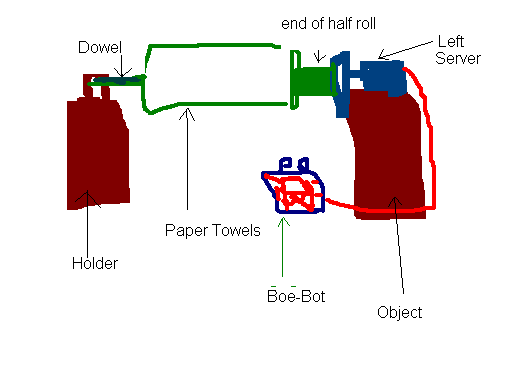
Model- First, take out the Boe-Bot's LEFT wheel. Put that aside. Then take a Full paper towel roll and HALF or less of an empty roll. Squeeze one end of the half roll, and then insert it into the Full Roll, leaving about one half of the half roll sticking out. Make sure it is very tight and secure. Then get a 1 inch dowel. Get one holder for the dowel and another object with a flat top that is the same size. Put the dowel in the holder, and attach the boe-bot servo and wheel on the object. Then, put your rolls on the dowel. Finally, attach the sticking out half roll to the boe-bot servo. I'm sorry if this is confusing but I'm not a good explainer. I will appreciate positive feed back and information because I'm still a basic learner.
Then get a 1 inch dowel. Get one holder for the dowel and another object with a flat top that is the same size. Put the dowel in the holder, and attach the boe-bot servo and wheel on the object. Then, put your rolls on the dowel. Finally, attach the sticking out half roll to the boe-bot servo. I'm sorry if this is confusing but I'm not a good explainer. I will appreciate positive feed back and information because I'm still a basic learner.
Thanks.
Attached·is a paint made diagram.(I'm a REALLY bad artist)
How my model functions is place your hand in front of the IRs, and the paper will unravel until you take your hand away, and then it goes back up. I tunned it so when your hand is away, and the unraveled paper towel is down, the boe-bot· only sort-of reconises the paper, and stays put.
Code[noparse]:([/noparse]You can revise it alot)
' {$STAMP BS2}
' {$PBASIC 2.5}
DEBUG "Paper Towel Dispenser On!" Kpl CON 35 Kpr CON -35 SetPoint CON 3 CenterPulse CON 750 freqSelect VAR Nib irFrequency VAR Word distanceL VAR Nib distanceR VAR Nib pulseL VAR Word irDetectL VAR Bit irDetectR VAR Bit FREQOUT 4, 2000, 3000 DO GOSUB SR1 pulseL = SetPoint - distanceL * Kpl + CenterPulse GOSUB Unravel LOOP SR1: distanceL = 0 FOR freqSelect = 0 TO 4 LOOKUP freqSelect, [noparse][[/noparse]37500, 38250, 39500, 40500, 41500], irFrequency FREQOUT 8,1,irFrequency irDetectL = IN9 distanceL = distanceL - irDetectL NEXT RETURN Unravel : PULSOUT 13, pulseL PAUSE 6 RETURN
Scematic- The scematic is the average IR sensing Boe-Bot in the manual and on the front page, but replace the 1k resistors with 3k or 4k resistors
Model- First, take out the Boe-Bot's LEFT wheel. Put that aside. Then take a Full paper towel roll and HALF or less of an empty roll. Squeeze one end of the half roll, and then insert it into the Full Roll, leaving about one half of the half roll sticking out. Make sure it is very tight and secure.
Then get a 1 inch dowel. Get one holder for the dowel and another object with a flat top that is the same size. Put the dowel in the holder, and attach the boe-bot servo and wheel on the object. Then, put your rolls on the dowel. Finally, attach the sticking out half roll to the boe-bot servo. I'm sorry if this is confusing but I'm not a good explainer. I will appreciate positive feed back and information because I'm still a basic learner.Thanks.
Attached·is a paint made diagram.(I'm a REALLY bad artist)
Comments
People really waste a lot of both.
The IR is great as you don't have to touch anything with wet hands.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
"When all think alike, no one is thinking very much.' - Walter Lippmann (1889-1974)
······································································ Warm regards,····· G. Herzog [noparse][[/noparse]·黃鶴 ]·in Taiwan