

Robomaid Hacked

This is my second robot after getting the kit for Christmas.· No prior electronics experience.· The robomaid redo I have been working on is complete.·I call it Robomaid2.·It uses the outside of this product. http://www.robomaid.com
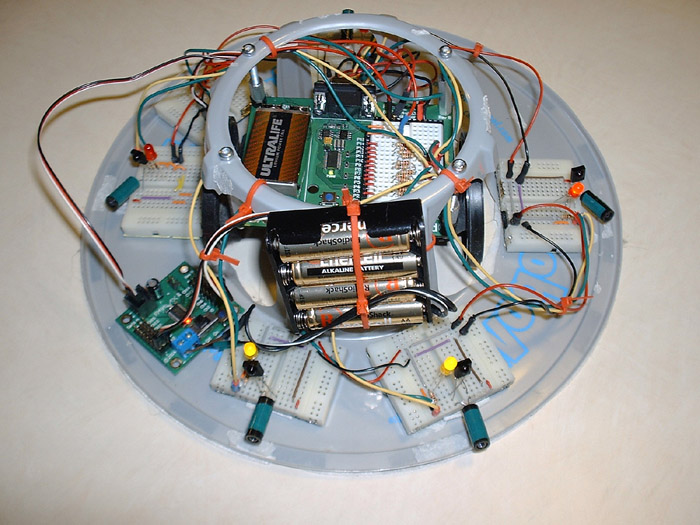
It uses 5 IR pairs.· 2 in front, 2 on the side, one in back.· The front pair is for detecting front collisions.· The theory of the side pair is that the robomaid2 can hang very close to the walls and cupboard bases, where most of the dust is.· (I have not completed the code for this, although it works pretty well like it is)· The back IR helps when the robot gets a little too cramped.· It rotates, and the back IR helps it get out of loops by kicking the robot forward.
The leds are wired from the IR recievers, and light up when they get data.· This let me see how the IRs were getting read.··This was all a bit much for the battery, so I added a Parallax Servo Controller, so I could run the servos from a seperate power supply, and this also let the IR looping go much faster.· It is really fun to watch it run with the lights out.·
I am running a counting procedure that Andy offered,·on the IR's, as they were picking up the ballasts in my kitchen.· Thanks to Beau, Andy, Bruce, Jon, and everyone else who helped me every step of the way.· I have learned a lot and had a lot of fun with it.
If I were to add anything, I would add another IR pair to keep it from going down the basement steps, and a light measuring system that would let me turn off the counting procedure when the lights were off.· I will probably tune up the software quite a bit.· Thanks to everyone who helped, and to Parallax for thier incredible support.
It uses 5 IR pairs.· 2 in front, 2 on the side, one in back.· The front pair is for detecting front collisions.· The theory of the side pair is that the robomaid2 can hang very close to the walls and cupboard bases, where most of the dust is.· (I have not completed the code for this, although it works pretty well like it is)· The back IR helps when the robot gets a little too cramped.· It rotates, and the back IR helps it get out of loops by kicking the robot forward.
The leds are wired from the IR recievers, and light up when they get data.· This let me see how the IRs were getting read.··This was all a bit much for the battery, so I added a Parallax Servo Controller, so I could run the servos from a seperate power supply, and this also let the IR looping go much faster.· It is really fun to watch it run with the lights out.·
I am running a counting procedure that Andy offered,·on the IR's, as they were picking up the ballasts in my kitchen.· Thanks to Beau, Andy, Bruce, Jon, and everyone else who helped me every step of the way.· I have learned a lot and had a lot of fun with it.
If I were to add anything, I would add another IR pair to keep it from going down the basement steps, and a light measuring system that would let me turn off the counting procedure when the lights were off.· I will probably tune up the software quite a bit.· Thanks to everyone who helped, and to Parallax for thier incredible support.
700 x 525 - 138K
700 x 525 - 64K
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Happy new year
Congrats on the hackaday feature.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
·1+1=10