

Simple toy RF
 Tricky Nekro
Posts: 218
Tricky Nekro
Posts: 218
Greating to everyone...
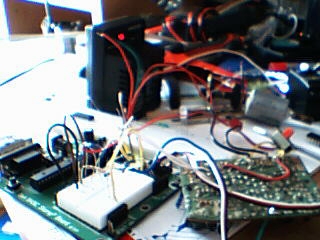
This is a project done in order to control the Boe-Bot with a simple RF toy transmiter...
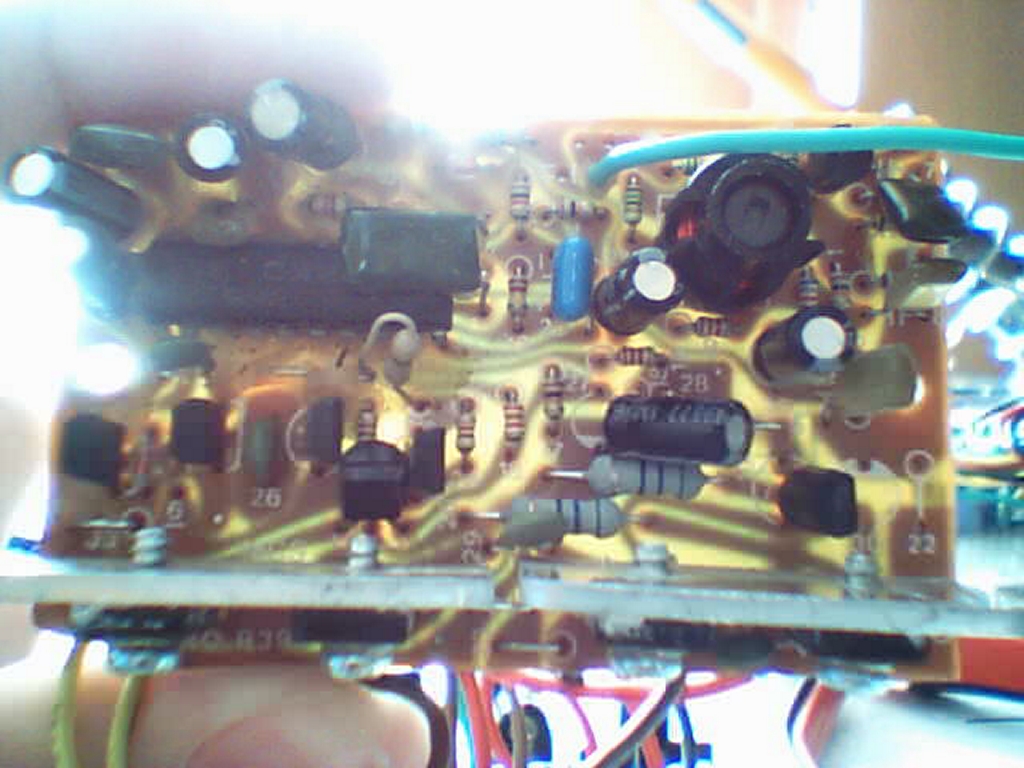
The reciver is mounted on the breadboard through a mini resistor board...
The max range of the module is about 100 - 200 meters... quit well for such an old module
The exable code:
' {$STAMP BS2}
' {$PBASIC 2.5}
' Code writen by Provas For
' Greekbotics.tk...
' Provas - The DeadGuy
' Copyrights 2004 - 2006
AP1 VAR Bit
AP2 VAR Bit
AP3 VAR Bit
AP4 VAR Bit
DO
DEBUG CLS
AP2 = IN3
AP1 = IN5
AP3 = IN7
AP4 = IN8
DEBUG BIN AP1, CR
DEBUG BIN AP2, CR, CR
DEBUG BIN AP3, CR
DEBUG BIN AP4
PAUSE 100
LOOP
' {$STAMP BS2}
' {$PBASIC 2.5}
' Code writen by Provas For
' Greekbotics.tk...
' Provas - The DeadGuy
' Copyrights 2004 - 2006
AP1 VAR Bit
AP2 VAR Bit
AP3 VAR Bit
AP4 VAR Bit
AP1 = 0
AP2 = 0
AP3 = 0
AP4 = 0
DO
AP1 = IN5
AP2 = IN3
AP3 = IN7
AP4 = IN8
IF (AP1 = 1) AND (AP2 = 0) AND (AP3 = 0) AND (AP4 = 0) THEN
GOSUB Forward
ELSEIF (AP1 = 0) AND (AP2 = 1) AND (AP3 = 0) AND (AP4 = 0) THEN
GOSUB Backward
ELSEIF (AP1 = 1) AND (AP2 = 1) AND (AP3 = 1) AND (AP4 = 1) THEN
GOSUB Center
ELSEIF (AP1 = 0) AND (AP2 = 0) AND (AP3 = 0) AND (AP4 = 0) THEN
GOSUB Center
ELSEIF (AP1 = 1) AND (AP2 = 0) AND (AP3 = 1) AND (AP4 = 0) THEN
GOSUB Turn_Left
ELSEIF (AP1 = 1) AND (AP2 = 0) AND (AP3 = 0) AND (AP4 = 1) THEN
GOSUB Turn_Right
ELSEIF (AP1 = 0) AND (AP2 = 1) AND (AP3 = 1) AND (AP4 = 0) THEN
GOSUB Center
ELSEIF (AP1 = 0) AND (AP2 = 1) AND (AP3 = 0) AND (AP4 = 1) THEN
GOSUB Center
ENDIF
LOOP
Forward:
PULSOUT 12, 650
PULSOUT 13, 850
PAUSE 10
RETURN
Backward:
PULSOUT 12, 850
PULSOUT 13, 650
PAUSE 10
RETURN
Turn_Left:
PULSOUT 12, 850
PULSOUT 13, 850
PAUSE 10
RETURN
Turn_Right:
PULSOUT 12, 650
PULSOUT 13, 650
PAUSE 10
RETURN
Center:
PULSOUT 12, 750
PULSOUT 13, 750
PAUSE 10
RETURN
By Tomorrow I'll have it mounted on a test mini bot and will upload a video with it's manuvers!!!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
-Rule your Destiny-
--Be Good. Be Bad. Be Provas--

This is a project done in order to control the Boe-Bot with a simple RF toy transmiter...
The reciver is mounted on the breadboard through a mini resistor board...
The max range of the module is about 100 - 200 meters... quit well for such an old module
The exable code:
' {$STAMP BS2}
' {$PBASIC 2.5}
' Code writen by Provas For
' Greekbotics.tk...
' Provas - The DeadGuy
' Copyrights 2004 - 2006
AP1 VAR Bit
AP2 VAR Bit
AP3 VAR Bit
AP4 VAR Bit
DO
DEBUG CLS
AP2 = IN3
AP1 = IN5
AP3 = IN7
AP4 = IN8
DEBUG BIN AP1, CR
DEBUG BIN AP2, CR, CR
DEBUG BIN AP3, CR
DEBUG BIN AP4
PAUSE 100
LOOP
' {$STAMP BS2}
' {$PBASIC 2.5}
' Code writen by Provas For
' Greekbotics.tk...
' Provas - The DeadGuy
' Copyrights 2004 - 2006
AP1 VAR Bit
AP2 VAR Bit
AP3 VAR Bit
AP4 VAR Bit
AP1 = 0
AP2 = 0
AP3 = 0
AP4 = 0
DO
AP1 = IN5
AP2 = IN3
AP3 = IN7
AP4 = IN8
IF (AP1 = 1) AND (AP2 = 0) AND (AP3 = 0) AND (AP4 = 0) THEN
GOSUB Forward
ELSEIF (AP1 = 0) AND (AP2 = 1) AND (AP3 = 0) AND (AP4 = 0) THEN
GOSUB Backward
ELSEIF (AP1 = 1) AND (AP2 = 1) AND (AP3 = 1) AND (AP4 = 1) THEN
GOSUB Center
ELSEIF (AP1 = 0) AND (AP2 = 0) AND (AP3 = 0) AND (AP4 = 0) THEN
GOSUB Center
ELSEIF (AP1 = 1) AND (AP2 = 0) AND (AP3 = 1) AND (AP4 = 0) THEN
GOSUB Turn_Left
ELSEIF (AP1 = 1) AND (AP2 = 0) AND (AP3 = 0) AND (AP4 = 1) THEN
GOSUB Turn_Right
ELSEIF (AP1 = 0) AND (AP2 = 1) AND (AP3 = 1) AND (AP4 = 0) THEN
GOSUB Center
ELSEIF (AP1 = 0) AND (AP2 = 1) AND (AP3 = 0) AND (AP4 = 1) THEN
GOSUB Center
ENDIF
LOOP
Forward:
PULSOUT 12, 650
PULSOUT 13, 850
PAUSE 10
RETURN
Backward:
PULSOUT 12, 850
PULSOUT 13, 650
PAUSE 10
RETURN
Turn_Left:
PULSOUT 12, 850
PULSOUT 13, 850
PAUSE 10
RETURN
Turn_Right:
PULSOUT 12, 650
PULSOUT 13, 650
PAUSE 10
RETURN
Center:
PULSOUT 12, 750
PULSOUT 13, 750
PAUSE 10
RETURN
By Tomorrow I'll have it mounted on a test mini bot and will upload a video with it's manuvers!!!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
-Rule your Destiny-
--Be Good. Be Bad. Be Provas--
320 x 240 - 64K

320 x 240 - 46K

1024 x 768 - 408K
1024 x 768 - 433K

1024 x 768 - 449K
Comments
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
-Rule your Destiny-
--Be Good. Be Bad. Be Provas--
· I think that I have saved you some·EEPROM space by modifying your program (adding some variables, re-rendering your IF...THENs)· Have I succeeded?
This is only the test code and not the main time run code...
You have tried to save EEPROM and entered new variables...
I'm working on a multibot so I need bot RAM and EEPROM map flexibility...
Thank you very very much about your intrest...
I'll need it as I procceed my project...
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
-Rule your Destiny-
--Be Good. Be Bad. Be Provas--