

Better Boe-Bot IR Distance Measurements (Circuit + Programs)
 Andy Lindsay (Parallax)
Posts: 1,919
Andy Lindsay (Parallax)
Posts: 1,919
This circuit below and the attached programs provide distance measurements that are better than the examples in Robotics with the Boe-Bot, Chapter 8.· The measurements split a·one foot (approx) distance into eight zones that are pretty evenly spaced, and there's next to no jitter in the measurements.·
····
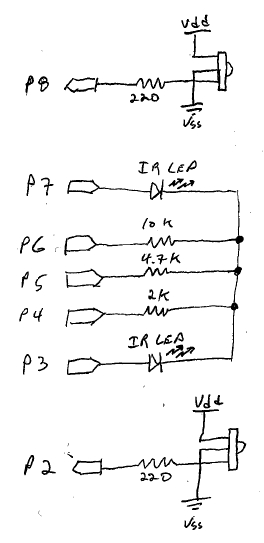
The example programs make the distance measurement by placing different resistances in series with the IR LEDs.· The different series resistances are set by manipulating the input/output states of P4, P5, and P6.· In the initialization of the program, P4 to P7 are all set LOW (connected to Vss), but left as inputs with the command OUTB = %0000.· After that, the program manipulates which of those pins are connected to VSS and which of them are inputs with by setting DIRB equal to different values.· For example, DIRB = %0101 sets P6 and P4 to outputs, but leaves P5 an input.· Since·earlier in the program, the OUTB was set to %0000, any I/O pin that gets changed to an output will send the·LOW signal.· If DIRB = %0001,·that makes P6 and P5 inputs, but P4 is·output-low.· That means·P4 is connected·to Vss.· Whenever anything is connected to Vss, it is commonly referred to as connected to ground, or "grounded".·
The example programs use FOR DIRB = 1 to 7...NEXT to take P4, P5, and P6 through the following input/output combinations: %0001, %0010, %0011, %0100, %0101, %0110, %0111.· Each different OUTB setting causes different combinations of parallel resistors to be in series with the IR LEDs.· The thing about different parallel combinations of resistors is that they provide different levels of series resistance with the IR LEDs.··From·Robotics with the Boe-Bot, Chapter 7, Activity #3, we know that different series resistances equate·to different IR LED headlight brightnesses.··The brighter the IR LED, the further·the IR·receiver·can see to detect an object.· Inside the FOR...NEXT loop, the code counts the number of detections each side saw, and equates that to a distance.
Here is the equation for calculating the equivalent resistance of one or more parallel resistors:
· Req = (R1-1 + R2-1 + R3-1 + ... + RN-1)-1
Here is another form of the same equation:
· Req = 1 / (1/R1 + 1/R2 + 1/R3 + ... + 1/RN)
Let's say DIRB = %0111.· That means that all three resistors are connected to Vss and are part of the circuit.· To calculate the equivalent resistance in series with the IR LED, it's:
· Req = 1 / (1/2000 + 1/4700 + 1/10000) = 1230 ohms
Here's another example with DIRB = %0101.· With this, configuration, P6 and P4 are grounded, but P5 is an input.· So the 4.7 k resistor is not part of the circuit, and we only want to calculate the parallel resistance for the 10 k and 2 k resistors.· The notation for parallel resistance is R1 || R2, etc.· So, this calculation is for 2 k || 10 k:
· Req·= 1 / (1/2000 + 1/10000) = 1667 ohms.
The different·series resistances you can get from the seven different combinations of OUTB are: 1230, 1402, 1667, 2000, 3197, 4700, and 10,000.
Both programs below are also attached to this post.
This example program tests the distance for both IR Detectors and displays it in the Debug Terminal.· You should be able to get values from 0 to 7, wich corresponds to between 1 inch and 1 foot.·
This example program is the following Boe-Bot program from Robotics with the Boe-Bot, Chapter 8, Activity #2.· With this program, the Boe-Bot should be able to lock onto and follow an object with much less jitter.
·
Post Edited By Moderator (Jessica Uelmen (Parallax)) : 8/25/2010 5:55:58 PM GMT
····
The example programs make the distance measurement by placing different resistances in series with the IR LEDs.· The different series resistances are set by manipulating the input/output states of P4, P5, and P6.· In the initialization of the program, P4 to P7 are all set LOW (connected to Vss), but left as inputs with the command OUTB = %0000.· After that, the program manipulates which of those pins are connected to VSS and which of them are inputs with by setting DIRB equal to different values.· For example, DIRB = %0101 sets P6 and P4 to outputs, but leaves P5 an input.· Since·earlier in the program, the OUTB was set to %0000, any I/O pin that gets changed to an output will send the·LOW signal.· If DIRB = %0001,·that makes P6 and P5 inputs, but P4 is·output-low.· That means·P4 is connected·to Vss.· Whenever anything is connected to Vss, it is commonly referred to as connected to ground, or "grounded".·
The example programs use FOR DIRB = 1 to 7...NEXT to take P4, P5, and P6 through the following input/output combinations: %0001, %0010, %0011, %0100, %0101, %0110, %0111.· Each different OUTB setting causes different combinations of parallel resistors to be in series with the IR LEDs.· The thing about different parallel combinations of resistors is that they provide different levels of series resistance with the IR LEDs.··From·Robotics with the Boe-Bot, Chapter 7, Activity #3, we know that different series resistances equate·to different IR LED headlight brightnesses.··The brighter the IR LED, the further·the IR·receiver·can see to detect an object.· Inside the FOR...NEXT loop, the code counts the number of detections each side saw, and equates that to a distance.
Here is the equation for calculating the equivalent resistance of one or more parallel resistors:
· Req = (R1-1 + R2-1 + R3-1 + ... + RN-1)-1
Here is another form of the same equation:
· Req = 1 / (1/R1 + 1/R2 + 1/R3 + ... + 1/RN)
Let's say DIRB = %0111.· That means that all three resistors are connected to Vss and are part of the circuit.· To calculate the equivalent resistance in series with the IR LED, it's:
· Req = 1 / (1/2000 + 1/4700 + 1/10000) = 1230 ohms
Here's another example with DIRB = %0101.· With this, configuration, P6 and P4 are grounded, but P5 is an input.· So the 4.7 k resistor is not part of the circuit, and we only want to calculate the parallel resistance for the 10 k and 2 k resistors.· The notation for parallel resistance is R1 || R2, etc.· So, this calculation is for 2 k || 10 k:
· Req·= 1 / (1/2000 + 1/10000) = 1667 ohms.
The different·series resistances you can get from the seven different combinations of OUTB are: 1230, 1402, 1667, 2000, 3197, 4700, and 10,000.
Both programs below are also attached to this post.
This example program tests the distance for both IR Detectors and displays it in the Debug Terminal.· You should be able to get values from 0 to 7, wich corresponds to between 1 inch and 1 foot.·
' -----[noparse][[/noparse] Title ]--------------------------------------------------------------
' TestDistnaceWithNewCircuit.bs2
' Test sensitivity of new IR distance circuit.
' {$STAMP BS2} ' Stamp directive.
' {$PBASIC 2.5} ' PBASIC directive.
' -----[noparse][[/noparse] Variables ]----------------------------------------------------------
irDetectLeft VAR Bit
irDetectRight VAR Bit
distanceLeft VAR Nib
distanceRight VAR Nib
' -----[noparse][[/noparse] Initialization ]-----------------------------------------------------
DEBUG CLS, "Left Right", CR
OUTB = %0000
' -----[noparse][[/noparse] Main Routine ]-------------------------------------------------------
DO
GOSUB Get_Ir_Distances
DEBUG " ", DEC1 distanceLeft, " ", DEC1 distanceRight, CRSRX, 0
PAUSE 100
LOOP
' -----[noparse][[/noparse] Subroutine - Get IR Distances ]--------------------------------------
Get_Ir_Distances:
distanceLeft = 0
distanceRight = 0
FOR DIRB = 1 TO 7
FREQOUT 7,1,38500
irDetectLeft = IN8
distanceLeft = distanceLeft + irDetectLeft
FREQOUT 3,1,38500
irDetectRight = IN2
distanceRight = distanceRight + irDetectRight
NEXT
RETURN
This example program is the following Boe-Bot program from Robotics with the Boe-Bot, Chapter 8, Activity #2.· With this program, the Boe-Bot should be able to lock onto and follow an object with much less jitter.
·
' -----[noparse][[/noparse] Title ]--------------------------------------------------------------
' FollowingBoeBotWithNewDistanceCircuit.bs2
' Boe-Bot adjusts its position to keep objects it detects in zone 4.
' {$STAMP BS2} ' Stamp directive.
' {$PBASIC 2.5} ' PBASIC directive.
DEBUG "Program Running!"
' -----[noparse][[/noparse] Constants ]----------------------------------------------------------
Kpl CON -15
Kpr CON 15
SetPoint CON 4
CenterPulse CON 750
' -----[noparse][[/noparse] Variables ]----------------------------------------------------------
irDetectLeft VAR Bit
irDetectRight VAR Bit
distanceLeft VAR Nib
distanceRight VAR Nib
pulseLeft VAR Word
pulseRight VAR Word
' -----[noparse][[/noparse] Initialization ]-----------------------------------------------------
FREQOUT 4, 2000, 3000
' -----[noparse][[/noparse] Main Routine ]-------------------------------------------------------
DO
GOSUB Get_Ir_Distances
' Calculate proportional output.
pulseLeft = SetPoint - distanceLeft * Kpl + CenterPulse
pulseRight = SetPoint - distanceRight * Kpr + CenterPulse
GOSUB Send_Pulse
LOOP
' -----[noparse][[/noparse] Subroutine - Get IR Distances ]--------------------------------------
Get_Ir_Distances:
distanceLeft = 0
distanceRight = 0
FOR DIRB = 1 TO 7
FREQOUT 7,1,38500
irDetectLeft = IN8
distanceLeft = distanceLeft + irDetectLeft
FREQOUT 3,1,38500
irDetectRight = IN2
distanceRight = distanceRight + irDetectRight
NEXT
RETURN
' -----[noparse][[/noparse] Subroutine - Get Pulse ]---------------------------------------------
Send_Pulse:
PULSOUT 13,pulseLeft
PULSOUT 12,pulseRight
PAUSE 5
RETURN
Post Edited By Moderator (Jessica Uelmen (Parallax)) : 8/25/2010 5:55:58 PM GMT
264 x 543 - 50K

Comments
Steve
Yes, the digital pot is a great way to further increase the distance resolution. For this particular project, I tried to stick with parts that already come in the Robotics with the Boe-Bot kit. However, those who have both What's a Microcontroller and Robotics with the Boe-Bot kits can use the AD5220 10 k Digital Potentiometer from the What's a Microcontroller kit. Parallax also sells the AD5220 individually for $3.25. Here's the product page link: <http://www.parallax.com/detail.asp?product_id=604-00010>.
There are three different possible end to end resistances in the DS1804. I would recommend using the 10 k version; it will give you the best resolution.
I haven't actually posted anything on that yet, and it'll be a while before I get to it. Perhaps you'll have something up before then. Let us know how it goes.
Regards, Andy
Post Edited (Andy Lindsay (Parallax)) : 12/8/2005 1:26:49 AM GMT
Thx for this. I will try to add more to the kode, if i find out how everything works.
I've never realy koded much before :P But if i make it, i will post the results.
Again, thx for this 300% better solution.
Kim, Norway
For getting used to building circuits from schematics (without the aid of a wiring diagram), start with Appendix
After working on that for a while, try building circuits from the schematics.· To be on the safe side, draw the schematic from the circuit you have build, and reconcile the two before connecting power.
Diagram updated 1/23/06, 8:20 PM PST:
Post Edited (Andy Lindsay (Parallax)) : 1/24/2006 4:21:42 AM GMT
There was an error in the wiring diagram I uploaded yesterday. The right IR detector's output was connected to P0 (with a 220 ohm resistor). According to the schematic, it should have been connected to P2. Also, the IR LED leads labeled "Anodes" should have been labeled "Cathodes".·
The wiring diagram in the previous post has been updated to reflect these changes.
Regards, Andy
Post Edited (Andy Lindsay (Parallax)) : 1/24/2006 4:23:49 AM GMT
As soon as I have a free moment I'll hook this up with a digital pot-
Ryan
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Ryan Clarke
Parallax Tech Support
RClarke@Parallax.com
Post Edited (Andy Lindsay (Parallax)) : 1/24/2006 5:10:58 AM GMT
I made a little web page calculator that lets you plug in resistor values and get the total resistance for selected "on" resistors. Not sure if anyone will find this helpful, but here it is:
1uffakind.com/robots/resistorLadder.php
Please feel free to double check my math functions for possible errors! Parallax rocks!
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
When the going gets weird, the weird turn pro. -- HST
That looks great! It's a perfect link for this thread too.
Regards, Andy
There is a small error in FollowingBoeBotWithNewDistanceCircuit.bs2
this code:
should be:
since the wiring diagram shows the piezo speaker connected to pin1, and the piezo speaker cannot use pin4, since it is connected to a resistor.
The program definitely does reduce jitter quite a bit, but the bot still jitters a fair bit. So I was wondering if there was a way to get it to sit still when it is in the right spot, or is instability in the measured values normal for the IR sensors?
The first is by simply averaging a number of measurements. Try taking four or five measurements (and delivering four or five pulses). Keep adding up the measurements, then divide by the number of measurements you took. After that, recalculate the proportional drive that gets applied as you take the next four or five measurements (and deliver the next four or five pulses).
Another approach that can clean up the motion is with PID control. This one will take a little more work. Here is a link to a tutorial on the PID algorithm:
PID Control Intro with the BASIC Stamp <http://forums.parallax.com/forums/default.aspx?f=6&m=66982>
Another option would be to use a better distance sensor. For example, Ping)))Dar could be modified for following: <http://forums.parallax.com/forums/default.aspx?f=6&m=129099>
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Andy Lindsay
Education Department
Parallax, Inc.
For example
I would need the following:
a counter > cntr
number of measurements to average by > avgNum (let's say 4 for this example)
an array to keep the measurements in
then while cntr < avgNum I start filling the array, and average by cntr to decide what to do
once cntr = avgNum, then I start pushing new measurements into the array, and moving old measurements out of the array,
this would provide me with a rolling average.
This is my idea.
I am also thinking I could just start filling the array and average by avgNum from the begging, and accept a few milliseconds of weirdness while the program goes through the first cycles.
Anyhow, I have to go to work now, and don't have time to code this. If I get it done tonight, then I will post the code here.
Thanks!
here is the code:
' added constant AvgBy CON 4 'added VARs distLeftArray VAR Nib(AvgBy) distRightArray VAR Nib(AvgBy) index VAR Nib avgDistLeft VAR Byte avgDistRight VAR Byte 'in the initialization, I fill the array with the target value, so the bot doesn't move until it has a good average FOR index = 0 TO AvgBy - 1 distLeftArray(index) = SetPoint distRightArray(index) = SetPoint NEXT 'this is the new main routine DO GOSUB Get_Ir_Distances 'shuffle older values to higher index in the array FOR index = AvgBy - 2 TO 0 distLeftArray(index + 1) = distLeftArray(index) distRightArray(index + 1) = distRightArray(index) NEXT distLeftArray(0) = distanceLeft distRightArray(0) = distanceRight 'calculate rolling average avgDistLeft = 0 avgDistRight = 0 FOR index = 0 TO AvgBy - 1 avgDistLeft = avgDistLeft + distLeftArray(index) avgDistRight = avgDistRight + distRightArray(index) NEXT avgDistLeft = avgDistLeft / AvgBy avgDistRight = avgDistRight / AvgBy ' Calculate proportional output. pulseLeft = SetPoint - avgDistLeft * Kpl + CenterPulse pulseRight = SetPoint - avgDistRight * Kpr + CenterPulse GOSUB Send_Pulse LOOPAnyhow, i hope someone finds this interesting or useful
You only have to change the value of AvgBy to experiment with different averages. 4 works pretty well, with 10 it just sits there, 5 and 6 work, but are slower to respond.
Andy,
thanks for the awesome posts. I have read some of your other ones, and the instructions and diagrams are spectacular. You should work for parallax!
Post Edited (Evil Axis) : 11/7/2006 1:35:00 AM GMT
Am I correct in that assumption?
On the other hand, the PID stuff is really interesting.
Sorry if I hijacked the thread. I just got really interested in making the jitter go away. Seems that I am banging into the limits of the sensors though.
There's an apple and orange aspect here since the PID bot has a Propeller chip instead of a BASIC Stamp.· However, the Propeller's ability to get 40 distances instead of just 5 from the same sensors only served to make its jitter worse.· With only proportional control, the Bot with the Propeller chip jittered so badly in response to all the distance sensor noise that it would lose sight of the the object it was tracking and wonder off.· So the PID really·did a great job of cleaning up its object following behavior.·
Although I've never gotten around to writing PID Boe-Bot following code, I'm very confident that it's doable.· With some tuning of the Kp, Ki, and Kd, PID should clean up the Boe-Bot's behavior just as well as the performance on the video clip.· You may even be able to clean it up further by using your current averaging code as an input filter before the PID calculations.·
Yeah, you're right, we are drifting a little off the topic of this thread.· Well, if you start developing code and have questions or code to post, definitely start a new thread.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Andy Lindsay
Education Department
Parallax, Inc.
Post Edited (Andy Lindsay (Parallax)) : 11/7/2006 5:53:47 PM GMT
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Andy Lindsay
Education Department
Parallax, Inc.
Post Edited (Andy Lindsay (Parallax)) : 11/7/2006 6:16:47 PM GMT
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
OS-X: because making Unix user-friendly was easier than debugging Windows
links:
My band's website
Our album on the iTunes Music Store
http://forums.parallax.com/forums/default.aspx?f=25&m=156644
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Andy Lindsay
Education Department
Parallax, Inc.
·P.S.: Dear Andy, can you give us the code (.bs2) to add to make the Boe-Bot stay still when the object is not moving?
Post Edited (MichelB) : 7/6/2009 11:23:26 AM GMT
OUTB = %0000 ensures that all the any I/O pin in bank b (P4..P7) will send a low signal if its corresponding direction register bit is set to output with a binary 1.·
For example, OUTB = %0000 and DIRB = %0101 sets P4 and P6 output-low while leaving P5 and P7 as inputs.· If you change DIRB to %0010, all I/O pins will be input except for P5, which will be output-low.·
When an I/O pin is set to input, it's about like unplugging the resistor from the socket.· So, with DIRB = %0101, the signal can pass·to ground (output-low = shorted to ground)·through the resistors connected to P4 and P6, but not P5.· When DIRB is %0010, the signal can pass through the resistor connected to P5, but not the other resistors.
Andy
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Andy Lindsay
Education Department
Parallax, Inc.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Andy Lindsay
Education Department
Parallax, Inc.
In the attached program "TestDistanceWithNewCircuit.bs2" we can find in Initialization: OUTB = %0000 and in Subroutine: FOR DIRB = 1 TO 7, but in the attached program "FollowingBoeBotWithNewDistanceCircuit.bs2" OUTB = %0000 disappeared even in your last attachement. Is it a forgetting or it is not necessary to initialize with OUTB = %0000?
Best regards
Post Edited (MichelB) : 7/7/2009 4:30:49 PM GMT
Thanks for examining the code and asking. We appreciate these questions because this material will probably get revised and republished soon. At that time, I will add an information box that clarifies this point.
You are correct, it is not necessary to initialize with OUTB = %0000 because the BASIC Stamp initializes all its variables to zero. I added it to the first program example for the sake of discussion, but neglected to mention that·an OUTB = %0000 initialization·is redundant.
Andy
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Andy Lindsay
Education Department
Parallax, Inc.
With the IR Rx & Tx Wiring Schematic in your 1st post, can i use it as object avoidance sensor? If it's possible, can you provide me with the program code? I'm using BS2p24. By the way, the IR Distance Measurement program is really wonderful.
Thank you.
I like the way you use DIRB in the FOR loop to change the resistance.
One correction, though ... the following FOR loop:
FOR counter = 0 TO Elements
should be:
FOR counter = 0 TO Elements - 1
Otherwise you are going beyond the end of your array.
I also found it much smoother without the PAUSE 5. I haven't put it on the scope to check the timing, but I suspect the FREQOUTs and the rest of the code come pretty close to the 20ms between pulses.
Thanks for this great idea!