

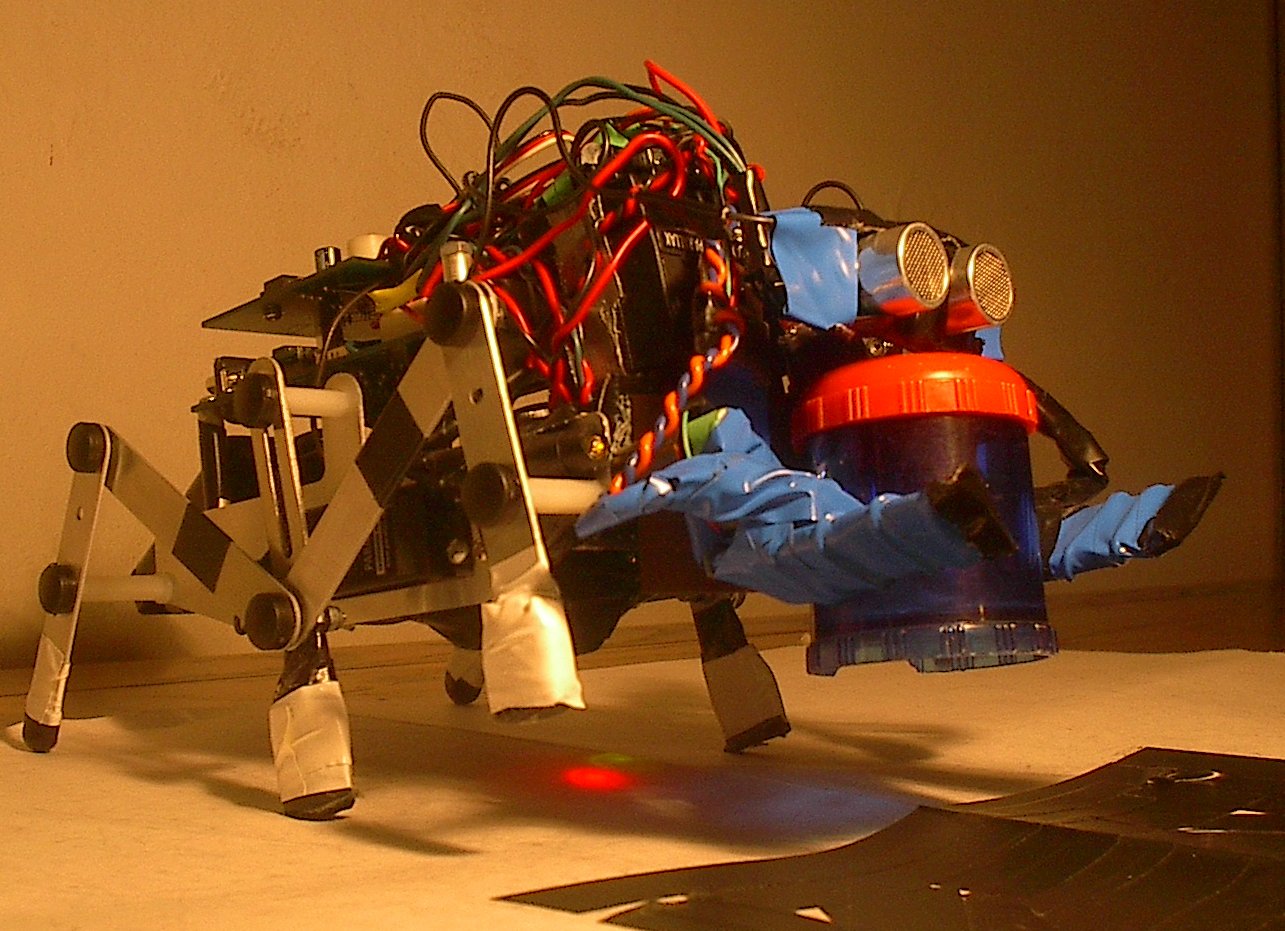
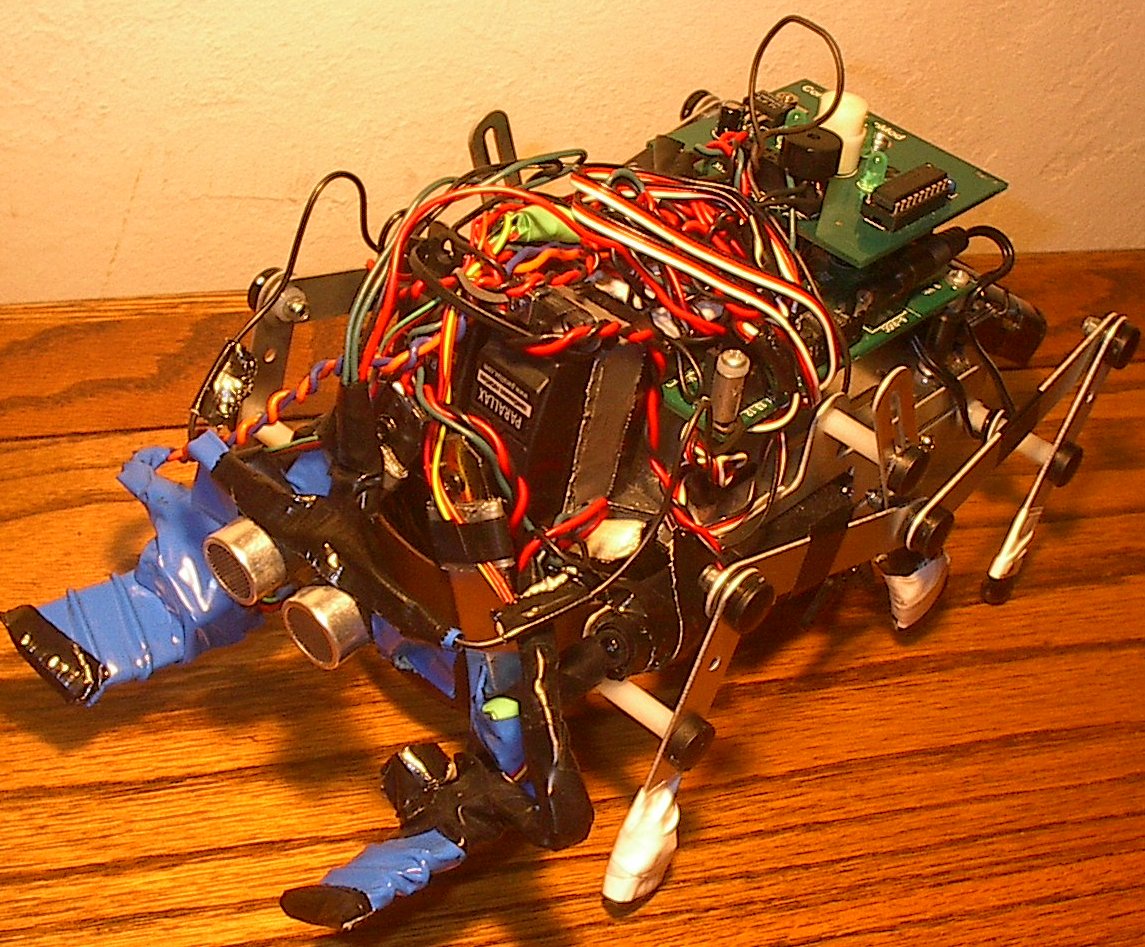
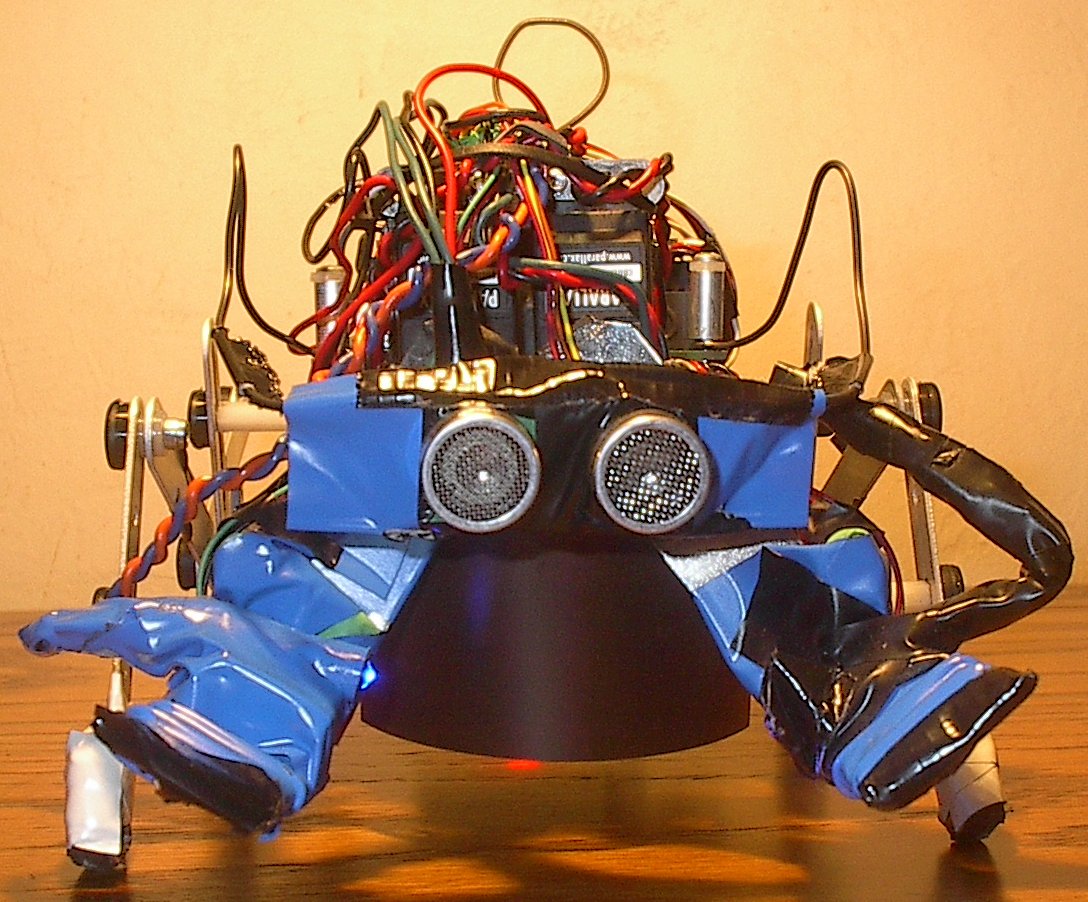
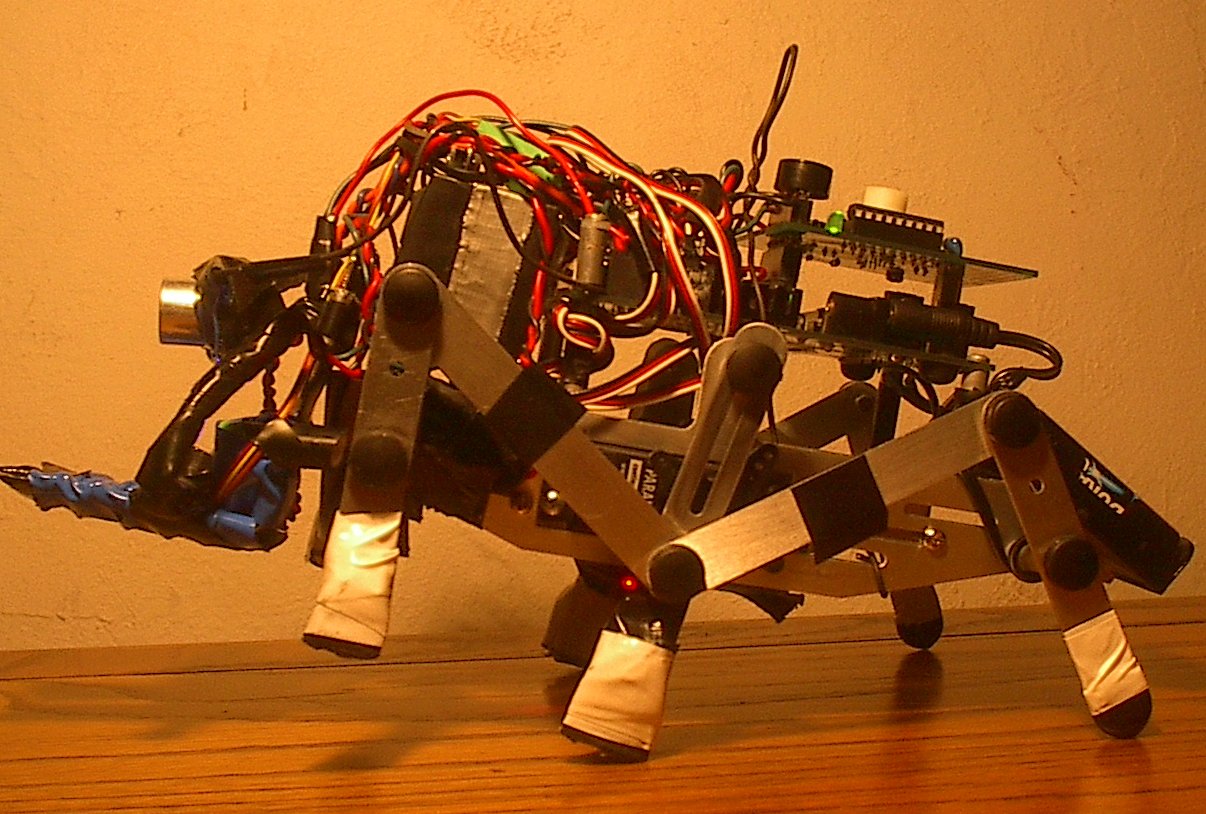
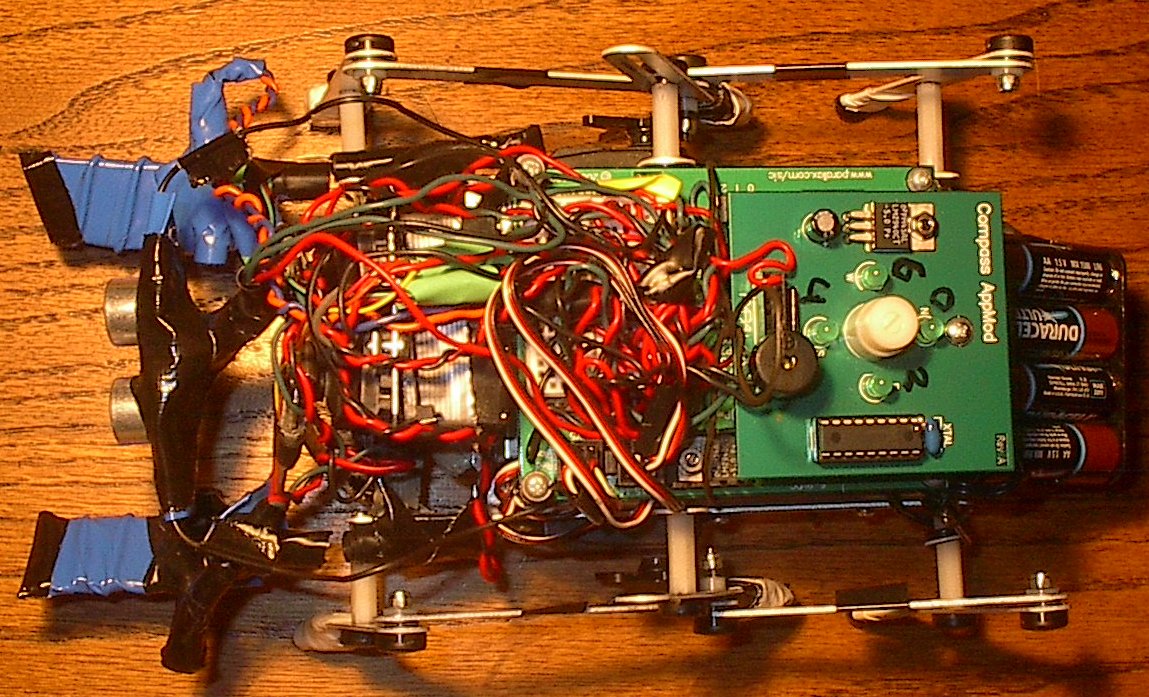
BOE BOT equipped with Sonar, Digital Compass Kit, Crawler Kit, and Gripper

With a little love and a lot of electrical tape this project was a success.
For my senior project at California State University Chico I built this little creature that is capapable of autonomous
object retrieval via Sonar, a Digital Compass, and a Crawler Kit all available from Parallax. The idea is to scan a 5'x5' table for objects
with the sonar and try to bring them back to center using the compass to navigate. I layed down a 1'x1' square of black
tape on the table so the unit would know when it it centered using the photosensor mounted below it. It was successful 9/10 times.
I made a gripper out of two servos mounted side by side and two metal PCI slot covers from
an abandoned computer that happened to be laying in my garage. I bent the PCI covers at 90 degree angles and
mounted them on the servos. I then applied a generous amount of tape to connect all the photosensors and LEDs that calibrate it.
I used a lot of extra wiring because I plan to detach the whole gripping unit for a larger project using the Javelin, an RF mod
and the tank mod.
I added some rubber booties to the crawler kit from an old radiator hose to cushion the stride a little. I also moved the power pack
to the rear of the unit to counterbalance the weight from the gripper.
More details and PBASIC2.5 source code for this project are available at http://www.ecst.csuchico.edu/~noahs/224/3-SeniorProject/
Movies clips of object retrieval in action to come!
For my senior project at California State University Chico I built this little creature that is capapable of autonomous
object retrieval via Sonar, a Digital Compass, and a Crawler Kit all available from Parallax. The idea is to scan a 5'x5' table for objects
with the sonar and try to bring them back to center using the compass to navigate. I layed down a 1'x1' square of black
tape on the table so the unit would know when it it centered using the photosensor mounted below it. It was successful 9/10 times.
I made a gripper out of two servos mounted side by side and two metal PCI slot covers from
an abandoned computer that happened to be laying in my garage. I bent the PCI covers at 90 degree angles and
mounted them on the servos. I then applied a generous amount of tape to connect all the photosensors and LEDs that calibrate it.
I used a lot of extra wiring because I plan to detach the whole gripping unit for a larger project using the Javelin, an RF mod
and the tank mod.
I added some rubber booties to the crawler kit from an old radiator hose to cushion the stride a little. I also moved the power pack
to the rear of the unit to counterbalance the weight from the gripper.
More details and PBASIC2.5 source code for this project are available at http://www.ecst.csuchico.edu/~noahs/224/3-SeniorProject/
Movies clips of object retrieval in action to come!
1285 x 931 - 224K
1145 x 947 - 284K
1088 x 902 - 213K
1206 x 814 - 205K
1149 x 697 - 244K
Comments
· Great robot, when will we get to see the movies you promised.
Kevin
http://www.ecst.csuchico.edu/~noahs/224/3-SeniorProject/video/
-Noah
· Looks great!· Very insect like.· How far out have you had the objects·that it finds?
Kevin
The robot finds the pencil sharpener and gets a good grip on it 9/10 times on the 5'x5' table.
The robot finds its way back to homebase 5/10 times due to misalignment on the return trip.
I have been working on the return code trying to get the success rate up to at least 8/10.
If the initial heading that is taken when the target is first located is not accurate then the
robot gets confused and heads off the table with the object instead of bringing it back to the
black area (homebase).
If it does not pickup any objects on the current spin then
on the next spin cycle it then increases the range a little and circles again looking further outward.
In this manner it redundantly checks ground that it has covered over and over up to a max of about
45 inches. The echo timing can be adjusted slightly to be more accurate at long distances.
I am interested in the new Hitachi digital compasses and am wondering if anyone reading this has
had the pleasure of testing one out. Checkout the "penguins" equipped with them that are posted here:
http://forums.parallax.com/forums/default.aspx?f=10&m=74498&g=74764#m74764
Noah
I've seen the video and it looks like your servo are stalling a bit. Maybe you should add an extra battery just to feed the servo ( I had big increase in speed·on my design). Or you could built lighter body and legs. I had made mine from a measure (one whole meter) and body from a hard file paper. Look at the picture of it was last summer... one of the latest addition I placed on my crawler was a tiny wireless camera... I was originally made it to scare my sisters cat by chasing her...
Good luck with all this tape!!!
Post Edited (Tronic (Greece)) : 5/26/2005 1:01:32 PM GMT
What type of camera did you install? I chase my girlfriends cat once in awhile also.
The reason for the delay in my robots gait in is not due to battery power issues.
I specifically designed the robot to pause in between steps to allow the sensors
their readings and reset the navigation heading based on them.
There is a sensor below the unit that needs to be updated between each step on the
return trip to check for the dark homebase area.
On top of that, the digital compass AppMod I am running states that it does not like being tipped past
10 degrees so I slightly reverse my servos between steps now to "flatten" the robot out before
updating the compass reading. The new Hitachi compasses look inviting but I have not yet got the
honor of trying one out.
Also, you don't want the robot pointing at the ceiling when the sonar is taking a reading.
One last thing to check before each step is the robots claw... I have to make sure there is not an object in the
gripper before it just goes plowing ahead or it could push the target out of the way accidently.
Concerning the weight issue, I definitely need to shed some of that tape off of the gripper and possible give it a
"haircut" by removing all that extra wiring. The Intelligent Systems Lab at California State University Chico has
agreed to purchase the project and even gave me a researching position for the Summer!
· They sell a product at home improvement and auto parts stores that you can dip your tools in to give them a rubber grip.· You could replace the tape on your grippers with this material and it may or may not shed some weight.· You could also dip the end of the legs in it.· By the way how do you know how thick the object is that you are picking up, or to ask another way how do the grippers know when to stop?
Both of you have great looking 'bots especially the hand-made legs by Tronic, most impressive.
Kevin
I have seen the rubber dip in stores before but did not think to use it on the claw. Thanks for the great idea.
I do not know if the rubber is thick enough to be applied to the legs though. I used a rubber radiator hose cut into pie
shaped wedges to increase the surface area of the feet as they crawl along.
In regards to your question about my gripper, the robot does not know how big the object is.
There are photosensors to detect the fully open position and I know that after five closing pulses
the gripper is definitely closed or gripping the object. The servos will take a good amount of
punishment before they expire. I have yet to break one. I also assume the object I am gripping can
also handle a small amount of pressure. I have considered using a bump sensor on one of the gripper's
arms. After the gripper photosensor's light beam is cut off the robot closes the gripper with the five pulses
I mentioned earlier. After getting the initial grip on the object, it slightly flexes them closed between
each step to maintain a hold on the object. This is due to the small amount of slack in the particular
servos I am using.
Thanks for your interest in my project, happy to answer any more questions.
Noah
Anyway have a look of it chasing the cat!!!!
http://forums.parallax.com/attachment.php?attachmentid=36253
·
Kevin
that cat would be in trouble!
Noah