

Super BOE-BOT
 Joe Fishback
Posts: 99
Joe Fishback
Posts: 99
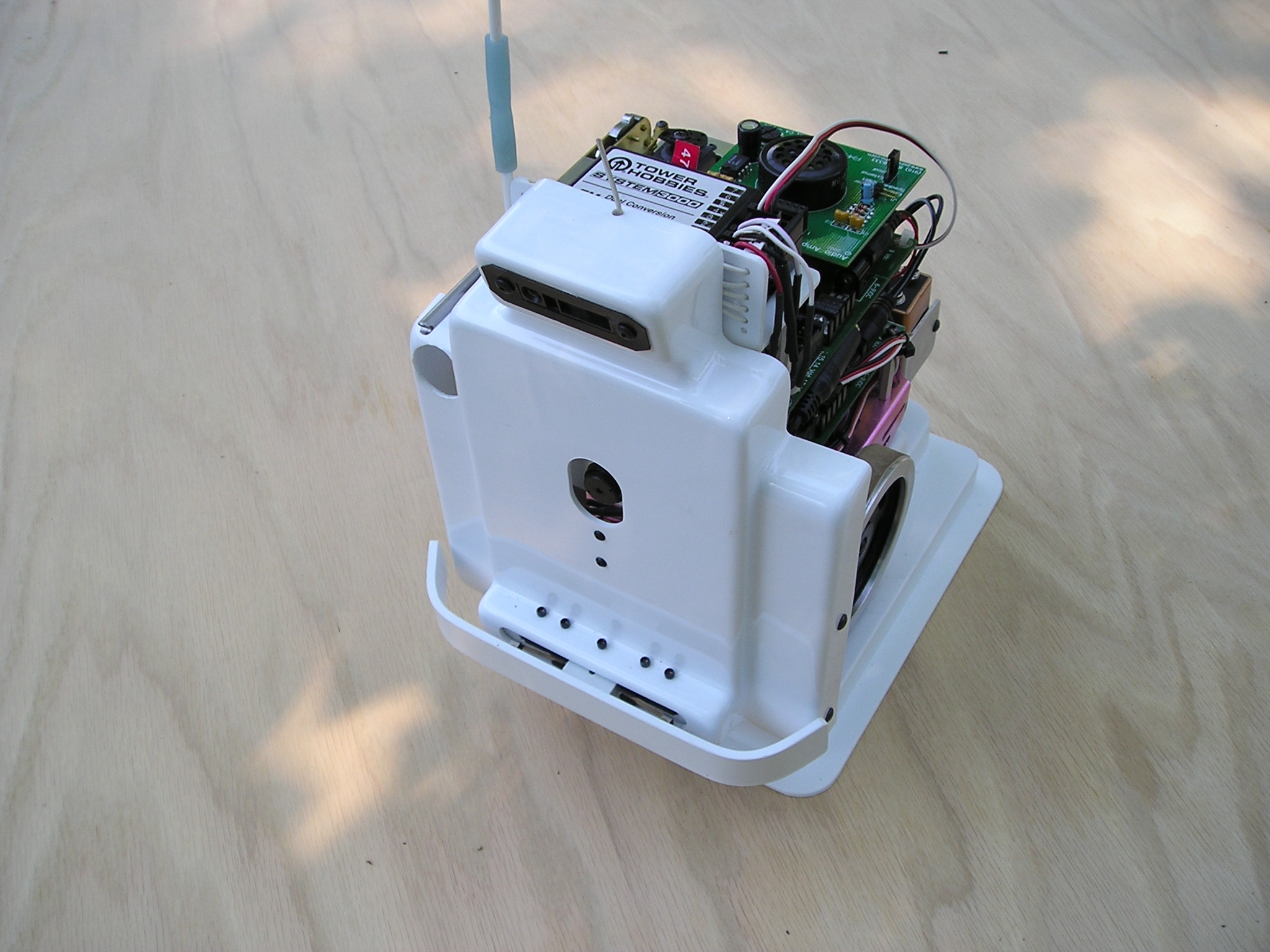
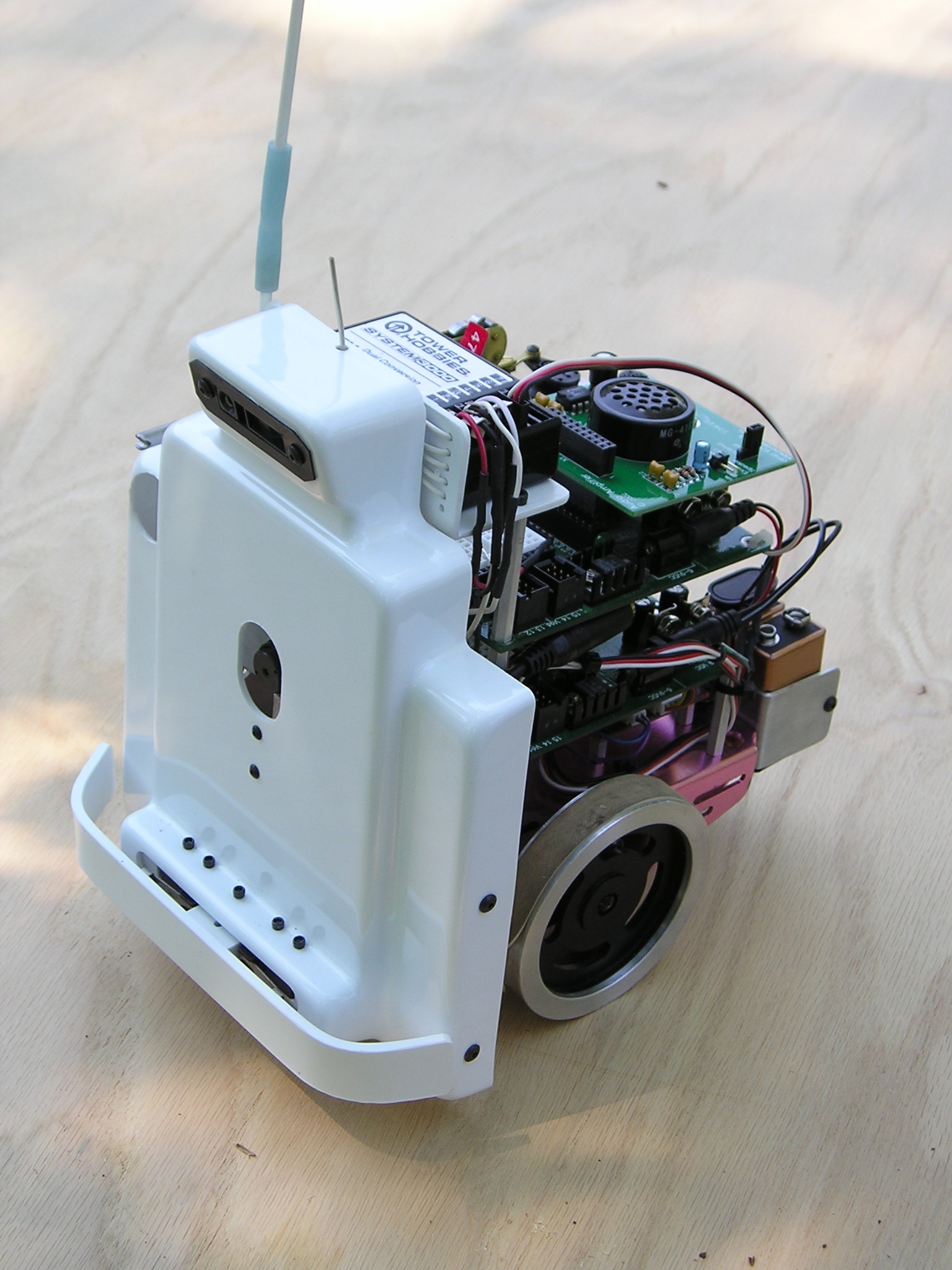
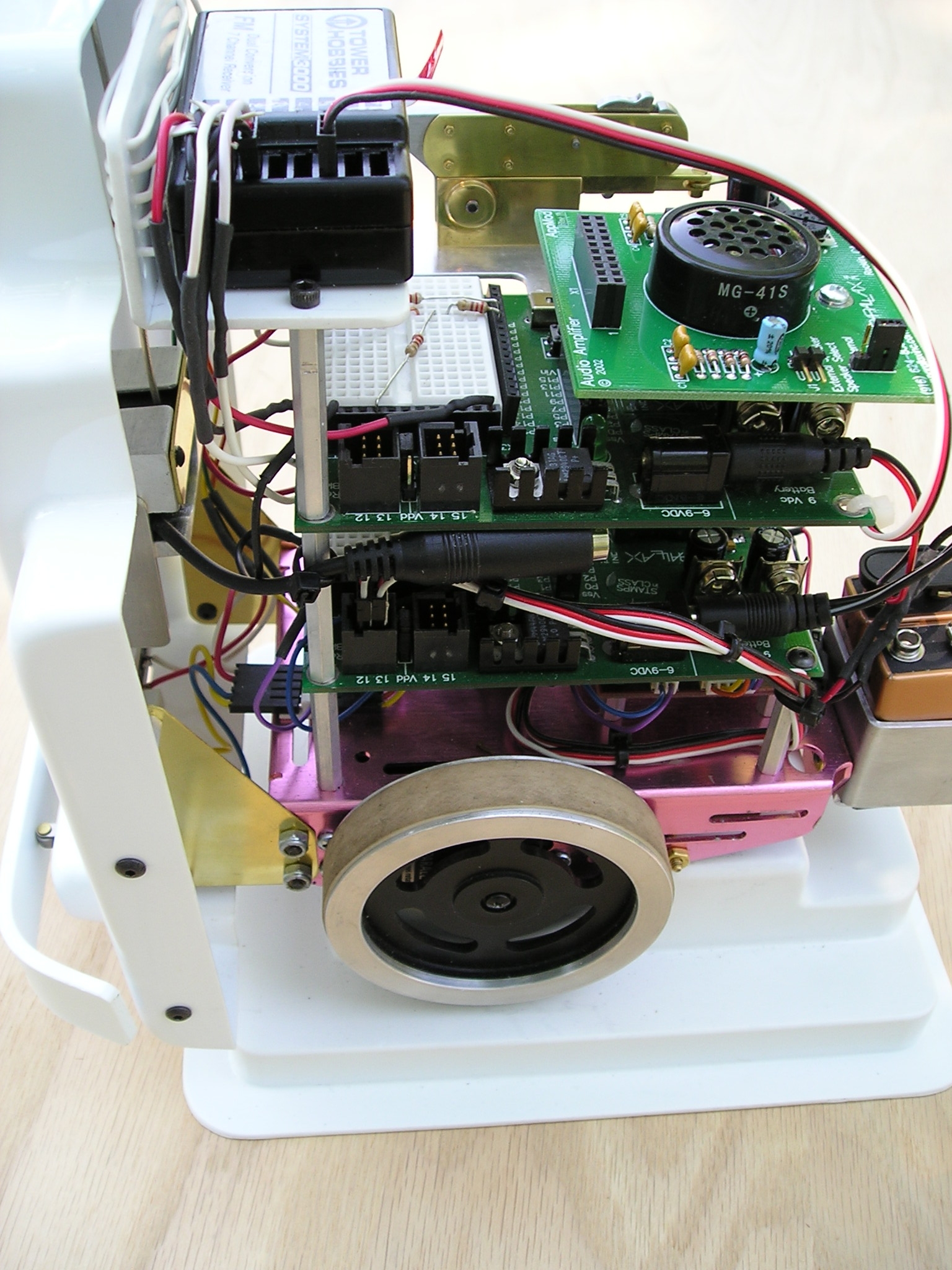
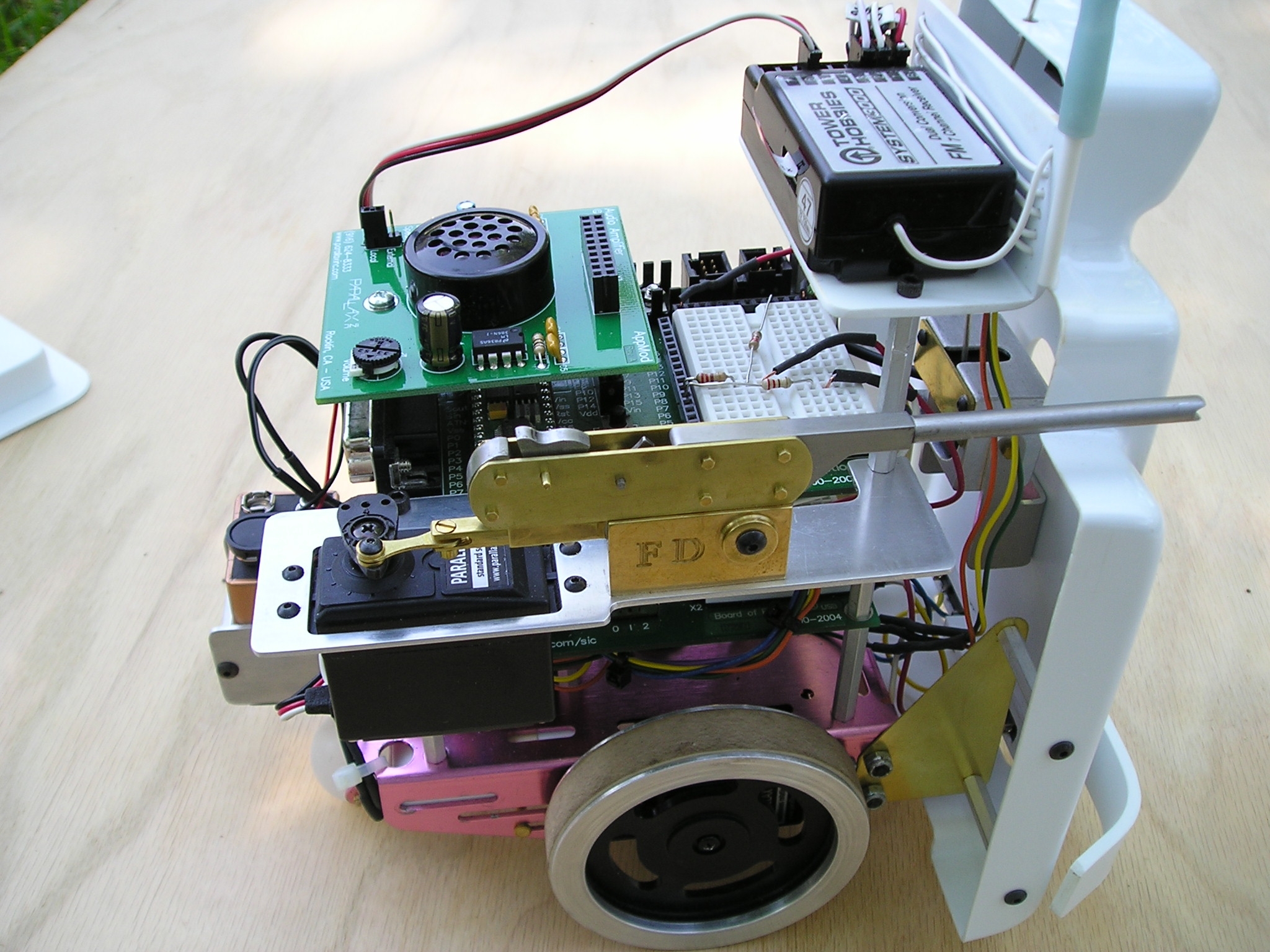
I would to show you all my “Super” BOE-BOT. The robot started out as a standard BOE-BOT with “Gazbot” detection. First a thermoformed front body with bump sensors was built. The circuit board from the “Gazbot” was mounted under the “Main” BOE board. The IR sensor from the “Gazbot” was mounted in the new body. Heavier duty switches for the bump sensors were mounted. Above the Main BOE, a second BOE board with an Audio Amplifier App board is mounted. Also, as shown in the picture “Robot Rifle.jpg”, there is a “Rubber band firing Rifle” for armament.
Now, why all the hardware. The robot is controlled first by use of a Model Radio Control unit. The RC receiver sends signals to the Main BOE. The Main program running on this board determines from two of channels on the receiver the direction (front or reverse) and if turning to left or right is also being signaled. The program determines the pulses to be sent on the two drive wheel servos, reversing one wheel in relation to the other, so the robot will go in the right direction. The also allows a single joy stick on the RC transmitter to be used. UP-DOWN is forward or reverse and LEFT-RIGHT is turning right or left.
The Main program also samples the Gazbot board to see if objects are detected. If objects are detected, the Main program takes control of the Robot from the RC unit to avoid the object, and then control is returned to the RC unit.
Now for the second BOE board. If an object is detected, a signal is sent from the Main program to the second BOE that is running a second program. This second program plays sounds thru Audio Amplifier board. Since this a separate program, the sounds can be play while the Main program is doing something else.
The Rubber Band Rifle is fired by a servo controlled by a third channel on the RC receiver. It fire up to 4 rubber bands and also causes a different sound to be made by the second BOE.
Also mounted in the front body is a wireless TV camera & transmitter. This sends color moving video of what the Robot sees. The video is viewed thru a receiver attached to a small hand held TV.
Joe Fishback
Now, why all the hardware. The robot is controlled first by use of a Model Radio Control unit. The RC receiver sends signals to the Main BOE. The Main program running on this board determines from two of channels on the receiver the direction (front or reverse) and if turning to left or right is also being signaled. The program determines the pulses to be sent on the two drive wheel servos, reversing one wheel in relation to the other, so the robot will go in the right direction. The also allows a single joy stick on the RC transmitter to be used. UP-DOWN is forward or reverse and LEFT-RIGHT is turning right or left.
The Main program also samples the Gazbot board to see if objects are detected. If objects are detected, the Main program takes control of the Robot from the RC unit to avoid the object, and then control is returned to the RC unit.
Now for the second BOE board. If an object is detected, a signal is sent from the Main program to the second BOE that is running a second program. This second program plays sounds thru Audio Amplifier board. Since this a separate program, the sounds can be play while the Main program is doing something else.
The Rubber Band Rifle is fired by a servo controlled by a third channel on the RC receiver. It fire up to 4 rubber bands and also causes a different sound to be made by the second BOE.
Also mounted in the front body is a wireless TV camera & transmitter. This sends color moving video of what the Robot sees. The video is viewed thru a receiver attached to a small hand held TV.
Joe Fishback
2048 x 1536 - 1M
1536 x 2048 - 1M
1536 x 2048 - 1M
2048 x 1536 - 1M
Comments
·· Very nice!· Very well put together.· I seem to recall a thread some time ago about the rubber-band launching idea?· Was that you?· Did you build the device you have mounted for doing this or was it a pre-fab unit?
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Chris Savage
Parallax Tech Support
csavage@parallax.com
i'll bet the thing weighs a ton.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
**************
daniel woolston
Teksystems Inc.
www.danwoolston.com
**************
was useful
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
1 + 1 = Window
***************************
***************************
** **
** Microman171@hotmail.com**
** **
***************************
***************************
As for the Rubber band rifle, it is of my design and built from scratch. Besides playing with robots, for years I have designed and built models of all kinds, model steam engines, rubber band guns, industrial scale models and scale machines. The Rubber band rifle works by using a "clock" type escapement to hold and fire the rubber bands. For all the body parts I made molds and thermoformed parts from them out of plastic on a Vacuum-Thermoform machine I have in my shop. The total weight of Robot is about twice the weight of a standard BOE-BOT.
Joe Fishback
-Noah
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Ben Damon
And may God Bless America!
The white thing under the robot is a thermoformed stand that I made. It allows you to test out a program on the robot without having to chase the robot all over the room. The wheels do not touch the stand so they can turn without making the robot move. Also I a have matching storage cover and componet tray that fits the stand if you just working with a plain BOE-BOT.
If anybody is interested please send me message.
Joe Fishback
Thanks
Microman171
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
1 + 1 = Window
/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\
0............................................0
0............................................0
0.(Microman171@hotmail.com)..0
0............................................0
0............................................0
\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/
The rifle fires small rubber bands and will hold up to four rubber bands. As for how to make one, the rifle is of my own design. The firing is done by an "clock" type escapement. It was made using a CNC milling machine that I have in my shop.
Joe Fishback - Fishback Designs
I am interested in the way you programmed the bs2 to recieve data from the receiver.
Mad_sceintist517
I posted back on 5/16/05 the code and explaination of the wiring for my "Super BOE-BOT"
this is the url-
http://forums.parallax.com/forums/default.aspx?f=21&m=74041
cut and paste the above url to get it to open or go to 05/16/05 on the "Project" forum
If these posts are noot what you need or have any questions, give me a post.
Joe Fishback