

can any teach me how to write a program for my basic stamp
 shawn
Posts: 2
shawn
Posts: 2
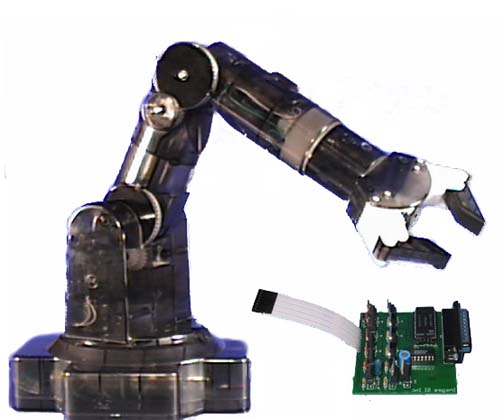
hi everyone i'm new here i would like to ask is there anyone there can help or teach me how to write basic stamp program. i'm using it to control my 5 motor robotarm
504 x 420 - 27K
Comments
I doubt that you'll like this answer one bit, but here goes. I suspect you purchased this robotic arm from Images Co. and it's an OWI 007 Robotic Arm Trainer with a PC Interface (as shown in your picture).
This robotic arm was designed to operate with the PC Interface as shown and have that interface connected to the PARALLEL port of a PC. Second, the software to drive it is expected to be from a DOS or Windows program. From what I can gather, the provided software runs a script language, which in turn, drives the interface, which operates the arm. In essense the interface might be viewed as the "hardware controller" for the arm.
Much of what I have mentioned so far can be found here on the Images Co. web site:
········· http://www.imagesco.com/articles/rai/01.html
That is the lead page in a series of pages which describes, in some detail, the entire trainer arm, the interface, and how it basically operates. What IS NOT shown or even hinted at is what the input to, and output from, the PC Interface looks like. If this were my project, that's the first thing I would try to investigate. Without that information, you're pretty much dead in the water.
The detailed information would indicate that 10 input/output ports are required for the operation of the robotic arm. That, in and of itself, is not a problem for any BS-2 series Stamp product. The question is, what needs to be done with those ports, what each of the individual ports do, and how to interpret any output from the interface module.
I'm sure that's not the answer you had hoped for, but at least it indicates some of the challanges which lie ahead of you should you wish to continue on this project. If·I had to guess, I'd say that it could be done with a microcontroller such as the PBASIC Stamp, but you'll need a good deal of additional information before you can proceed. I wouldn't know how to contact OWI, but that might be one direction you might try.
Regards,
Bruce Bates
http://www.parallax.com/detail.asp?product_id=28123
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Jon Williams
Applications Engineer, Parallax
Dallas Office
Bruce Bates.
▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔▔
Jon Williams
Applications Engineer, Parallax
Dallas Office
If you understand what's on the web page below, as it applies to your OWI Robotic Training Arm, it will be more help than you can possibly imagine:
···· http://www.southwest.com.au/~jfuller/robotarm/arm.htm
Apparently the arm can also be contolled by a manual "hand contoller". Emulating what the hand controller does, is really all you need to do. This entails opening and closing "switches" (small relays will work as well) to cause the various motors to operate as you require them to. Also shown is a reversing swich which merely changes the polarity of the motor leads, and thus the direction of operation. A DPDT switch or DPDT relay will operate fine for this application. If you need help wiring that, just ask. A pair of SPDT solid state switches might also be used if paired together. I've not seen any DPDT solid state switches although that's not to say that they don't exist.
I would use a ULN2003 or ULN2803
···· [noparse]/noparse]Allegro Micro or equal -[color=white]·[/color][url=http://www.allegromicro.com/sf/2001/]http://www.allegromicro.com/sf/2001/[/url][color=white]·[/color
as a current buffer between the Stamp and the motors, as it can handle 6 loads up to 500 ma. Just make sure that the motors don't draw more current than that. They have even shown a PCB that they used for experimentation here:
······· http://www.southwest.com.au/~jfuller/sio5.html
Another approach might be to use an addressable relay driver such as the NE/SA5090 as offered by Philips Semiconductor. I'm sure others make similar units for actuating multiple relays easily.
Hope that's helpful.
Regards,
Bruce Bates