

360 degree sonar + radar
 Rayman
Posts: 16,460
Rayman
Posts: 16,460
in Propeller 2
Trying to 3D print these parts now...
When done, plan to use a Parallax Feedback 360 servo and mount an XM125 radar module to one side of the rotor and a Ping on the other side.
At the top is a little slip ring for 6 wires...
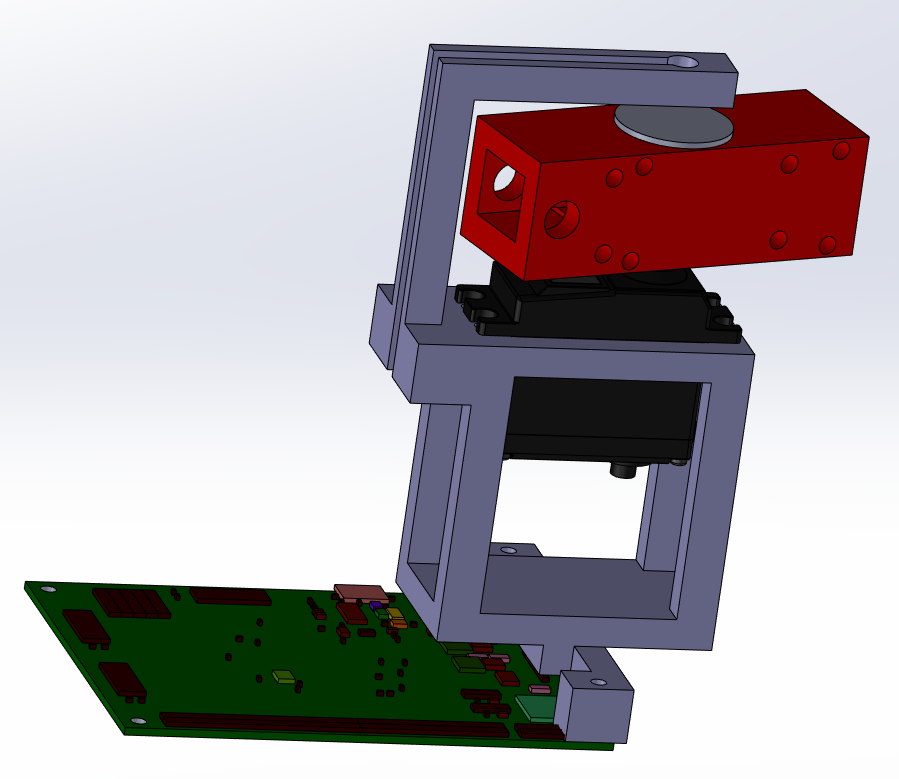
899 x 779 - 80K
Comments
Nice. I have this old robot project (3pi based + custom P1 controller add on) I made a while back out of a Ping sensor for its "eyes" & PIR+IR sensor with RGB lighting on the head indicating the state of its "brain" and LED teeth that flash in sync when it talks with a text-to-speech module. The PIR sensor can wake it up when in sentry/sleep mode if someone passes by. The LED "nose" flashes when I send IR command signals to it.
Currently it is still only a rough prototype essentially just made out of ABS plastic boxes and is on hold waiting for a much needed 3d printer to rebuild it all properly and some time away from all the other things I do. So your work on this 3d printed mount is somewhat inspiring for me. A continuous rotation servo like the Parallax Feedback 360 looks ideal for low pin count use vs a stepper motor and/or separate encoder which I was considering at one point. I've even obtained a 12 wire slip ring thinking I could eventually get its head to rotate and sense the area around it. Still hopeful to fit just a neck mount rotation mechanism under the robot's head since the head probably looks more realistic if it's fully open at the top, but it may not be mechanically as robust like that. It'll be easy for the poor little guy to break its neck so to speak if it falls down some stairs here in my house.
I think it will be interesting to see your design as you construct it and maybe I would need to move towards something like that too in the end. It's all food for thought.