

Older robot with swept object-avoidance sonar -- need software/code

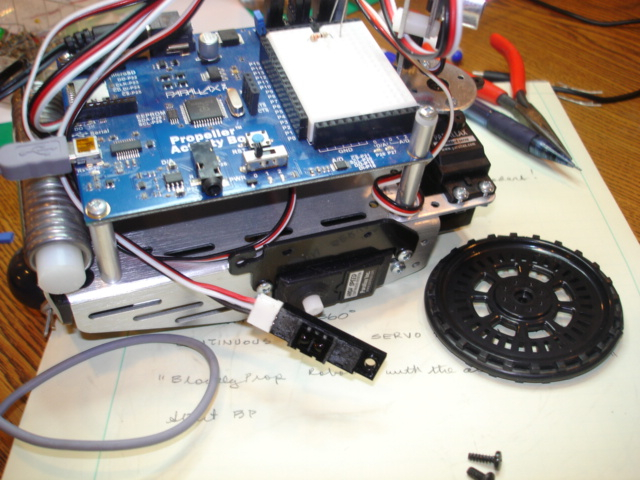
I have an early Prop-1 "Activity" bot that has a third servo that sweeps an ultrasonic measurement unit back and forth. If the robot encounters an object, it backs up, positions itself to avoid the object and moves forward. I need the original demonstration software (SPIN) and documentation for this robot so I can demonstrate it to a class.
The board is labeled, "Propeller Activity Board" with the number 32910 and "Rev A". The continuous-rotation servos have add-on rotation sensors and attach to the board with three wires, red, black, and white. I think this arrangement is obsolete.![]![]
I would greatly appreciate any help, having spent several hours searching without results.
Many thanks. --Jon
(https://forums.parallax.com/uploads/editor/aj/d6rrsm78vm3u.jpg "")
{kind=link}
Comments
Hi @JonTitus
I believe the robot you have is the first version of the Propeller Activity Bot (SKU 32500), an earlier version of the most recent one (SKU 32600), but I'm a bit unsure about what contents can be of any help to you.
The first document I've found was:
https://www1.parallax.com/sites/default/files/downloads/570-28015-PING-Mounting-Bracket-Documentation-v2.3_0.pdf
By googling with the following query, the remaining files/links will pop up:
site:www1.parallax.com AND “570-28015”
Hope it helps
Henrique
P.S. Schematics and guide (pdf) of Activity Board Rev A (32910) (courtesy Wayback Machine):
https://web.archive.org/web/20140712223308/parallax.com/sites/default/files/downloads/32910-Propeller-Activity-Board-RevA-Schematics.pdf
https://web.archive.org/web/20140713002843/parallax.com/sites/default/files/downloads/32910-Propeller-Activity-Board-Guide-v1.0.pdf
Jon,
I think you are thinking of the Prop BOE-Bot which used Spin.
The ActivityBot uses Propeller C.
https://learn.parallax.com/tutorials/activitybot-kit-info
https://learn.parallax.com/tutorials/series/activitybot-c-tutorials
https://learn.parallax.com/tutorials/robot/activitybot/legacy-version-propeller-c-programming-activitybot
That early rev of the Propeller Activity Board didn't have the logic for wireless programming designed in. Ie. The product name is missing the WX tag that was added at rev B.
~~ The project you describe sounds like Ping)))DAR. (Or maybe spelt PingDar).
Try a forum search. The project was introduced here by Andy many moons ago. ~~
Edit....
Scratch that! Seems that was a stamp project! Wow. Time flies!
Found this though... https://forums.parallax.com/discussion/161231/help-with-activity-bot-and-ping-bracket
VonSzarvas,
I saw a PING)))DAR for the ActivityBot 360 using BlockyProp, but what would need to changed to use the original ActivityBot.
https://learn.parallax.com/tutorials/robot/activitybot/pingdar-display-activitybot-and-blocklyprop
An upgrade kit would solve the problem.
https://www.parallax.com/product/small-robot-to-activitybot-360-upgrade-kit/
Thank you all for your help. I'm back on track with this project and appreciate the information and links. --Jon