

Troubleshooting a Depth Sounder with a Propeller
 Phil Pilgrim (PhiPi)
Posts: 23,514
Phil Pilgrim (PhiPi)
Posts: 23,514
I'm partners in a 26' sailboat. We recently had it out of the water for repairs, but now it's back in. One of the partners expressed a desire to use the boat and anchor it close to shore. Well, it might be a good idea to make sure the depth sounder still works, I thought. It didn't.
It's an ancient unit with 1960's technology -- the kind with a rotating neon light. I got it to the point where the rotor would rotate and the light would come on at zero depth, but it didn't show an echo. This could be due to three things:
- The echo receiver electronics are bad.
- The transducer is bad.
- The transducer cable is bad.
To eliminate #1, I built a small circuit on the Propeller Activity Board that I could use to insert an echo into the depth sounder after a delay from the unit's output ping. This ping consists of several AC cycles at 200 kHz and several hundred volts P-P. So I had to clamp that down to 3.3V so the Prop could deal with it safely. Here's the circuit I used:
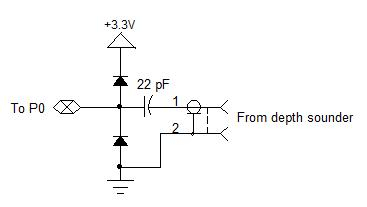
The way this works is that the Prop waits for a pulse from the depth sounder, then waits another 15 ms (about 30' of water). At this point it changes the port to an output which impresses a 200 kHz, 0.5 ms "return" ping onto the connector. This ping comes from a free-running counter in NCO mode.
Here's the program:
CON
_clkmode = xtal1 + pll16x
_xinfreq = 5_000_000
PUB start
ctra := %00100 << 26
frqa := $a3d9b9
repeat
waitpeq(1, 1, 0)
waitpne(1, 1, 0)
waitcnt(cnt + clkfreq * 15 / 1000)
dira[0]~~
waitcnt(cnt + clkfreq / 2000)
dira[0]~
waitcnt(cnt + clkfreq / 1000)
At the depth sounder end, through the 22 pF cap, this "echo" is about 100 mV P-P. Thankfully, the unit was able to pick it up, as the photo shows:
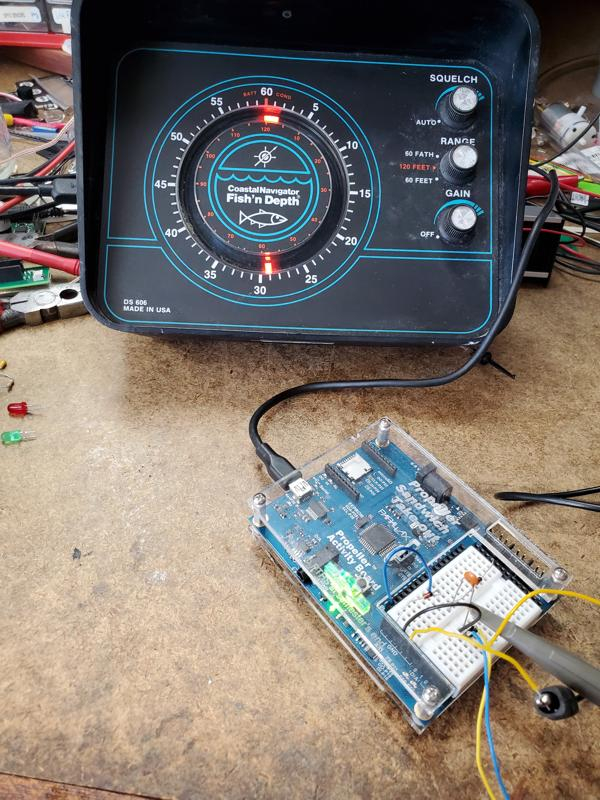
So that eliminates any issues with the electronics. Unfortunately the cable and transducer are going to be more difficult to troubleshoot.
-Phil
Comments
Do you have a portable 'scope? Maybe monitoring the tranducer line while it's active would provide some useful information. Hopefully you could see both the initial ping and check to see if the amplitude of the echo is detectable.
Sonar sure seems like really cool tech. I've always wanted to experiment with it but I'm not close enough to a large body of water to make this sort of experimenting practical.
No, but the boat has a battery, and I have an inverter that could power my 'scope. Good idea about monitoring the transducer line in situ! I just need to make a breakout adapter for the unit's RCA connector.
Thanks!
-Phil
Could you use a Propeller to fashion a simple TDR?
Sure. It'd be easy to have the Prop inject pulses into the cable and use a fast 'scope to observe the results. I might give that a try. Thanks!
Interestingly, the instructions for the 20' transducer cable caution not to shorten it and only to lengthen it by adding "specifically tuned extension cables" of 5', 10', 15' and 20' lengths, available from the manufacturer.
-Phil
I did an experiment in the shop with a 20' length of coax. I programmed the Prop to output 12.5 ns pulses via a counter's DUTY mode:
P0 was connected to the coax via a 0.1uF cap in series with a 75R resistor. I connected a 'scope directly to the fed end of the cable. Here's the trace with the other end open:
Here's with the other end shorted:
And with the other end 75R-terminated:
These are exactly what you would expect to see.
It'll be interesting to see what the transducer cable produces!
-Phil
Neat!
Sounds like the impedance of the transducer, electronics and/or coax differ. in these cases the coax length can be fine-tuned to also act as a matching transformer. Where only one frequency is considered, as here, the 'magic' lengths result in a correct match.
'Ham Radio Handbook' has a mind-numbingly detailed treatment on this.
If you replace the coax yourself, you can sample the signals at the sounder end and fine-tune the length for the best echo. BTW, in or out of the water will change the transducer's characteristic impedance as well.
That's very helpful to know. It gives me courage to clip the cable off near the transducer, if all else fails, and to replace it with a new one.
And I'll look up that section in the ARRL Handbook.
Thanks!
-Phil
I took my TDR setup down to the boat today to check out the transducer. But before I did anything else, I used a makeshift stethoscope to see if I could detect any "ticks" coming from the transducer with the depth sounder running. There was none. Next I hooked up the scope to the cable via a breakout connector to look at the outgoing and -- hopefully -- incoming signals. I could see no echo from the bottom but a large negative-going pulse immediately after the "ping" that decayed with a long tail. The long decay is no surprise, since the sounder goes into a high-impedance state after the "ping."
So I hooked up my TDR apparatus to the cable without the sounder connected. Here's what I got:
'Looks like a short at the end of the cable. But, weirdly, the delay from the end of this 20' cable (120 ns) is twice as long as the delay from the 20' coax in my shop (60 ns). Now, the cable on the boat is not coax but looks to be UTP (unshielded twisted pair). I'm not sure why that would make a difference, though. Also, the signal on the cable is considerably diminished in amplitude, compared to what I got with the coax in my shop.
Investigating the "short", I put an ohmmeter on the cable and it registered in the tens of megohms, but slowly diminishing, indicating capacitance. This is what one might expect from a piezo transducer. Anyway, I measured the capacitance with my multimeter, and it came to 3 nF.
Unfortunately, I can't disconnect the cable at the transducer: it's molded in with no connector. At this point, it looks like there isn't anything I can do to fix this thing. I suggested to one of the boat partners who has scuba gear that maybe we could swap out the transducer if he dove under the boat with the replacement and we worked really, really fast!")
-Phil
Total speculation here.. (and probably incorrect)
The 'velocity factor' will differ from one cable to another.. but not THAT much.
Perhaps the match cable-to-transducer is very good and the 120nS reflection is actually an effect of the transducer's resonance + the cable length..
But such a response, if my reasoning is correct, would seem to indicate a good transducer? -maybe- something has grown over the end of the transducer or in it's well?
I've ordered an AirMar P79 transducer off of eBay. It's an in-hull type that doesn't require drilling any holes. Fortunately, there's a way to test it before permanent installation by suspending it in a plastic bag full of water pressed against the inside of the hull. Fingers crossed ...
-Phil