

Revisiting the Little Robot Project

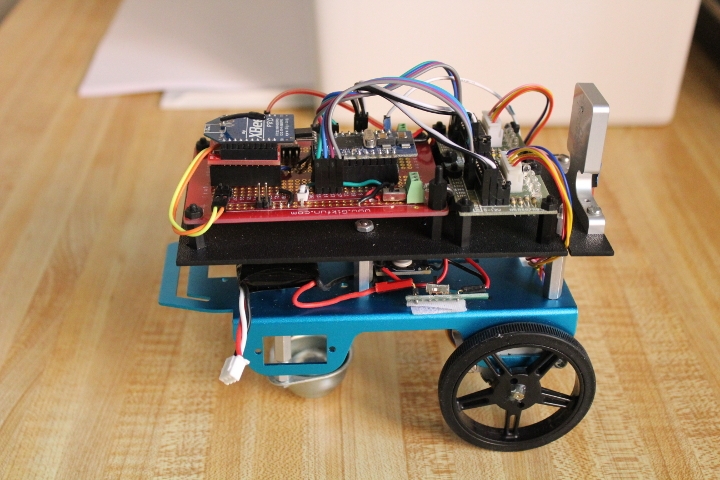
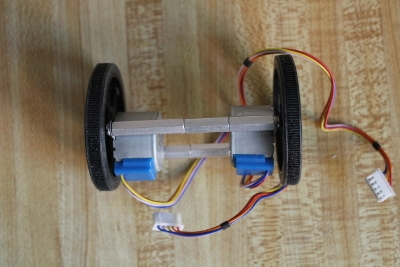
The little robot project was designed to use small inexpensive stepper motors programmed in Prop Forth. The current version (Fig1) uses a more robust chassis, adds a laser ping, communicates through a XBee (instead of blue tooth), and a propeller mini-board programmed in TRCL (Tachyon Robot Control Language). Fig2 shows how the stepper motors are connected. The motor drivers were designed for these motors.
The stepper motors come in two varieties: 5 V - 512 steps/rot (Fig2) and 12V - 128 steps/rot (Fig1).
A step up / step down power block is use to set the motor power derived from a 7.4 volt Li Polymer battery. These stepper motors operate in the half-step mode and use gears to set the actual number of steps. For the 12 volt version, an 8 ms step time is the minimum practical setting for operation at ca. 60 rpm. Increasing the step duration to 32 ms, reduces the velocity to ca. 15 rpm. Controlling the step duration rather than time between steps, results in a smoother motion. Besides being able to calculate wheel velocities and distance traveled, the self encoder motors allow displaying stepper counts separately for forward and backward wheel motions.
The attached document details the Tachyon code for robot control of the Little Robot.

Comments
Nice! I put those motors on a Boebot but they stripped out easily due to tiny plastic gears inside. Weird gear ratio too. Would love to see some video of yours!
My BS1 stepper robot does a figure 8.