

P2 SCARA does tower
 iseries
Posts: 1,547
iseries
Posts: 1,547
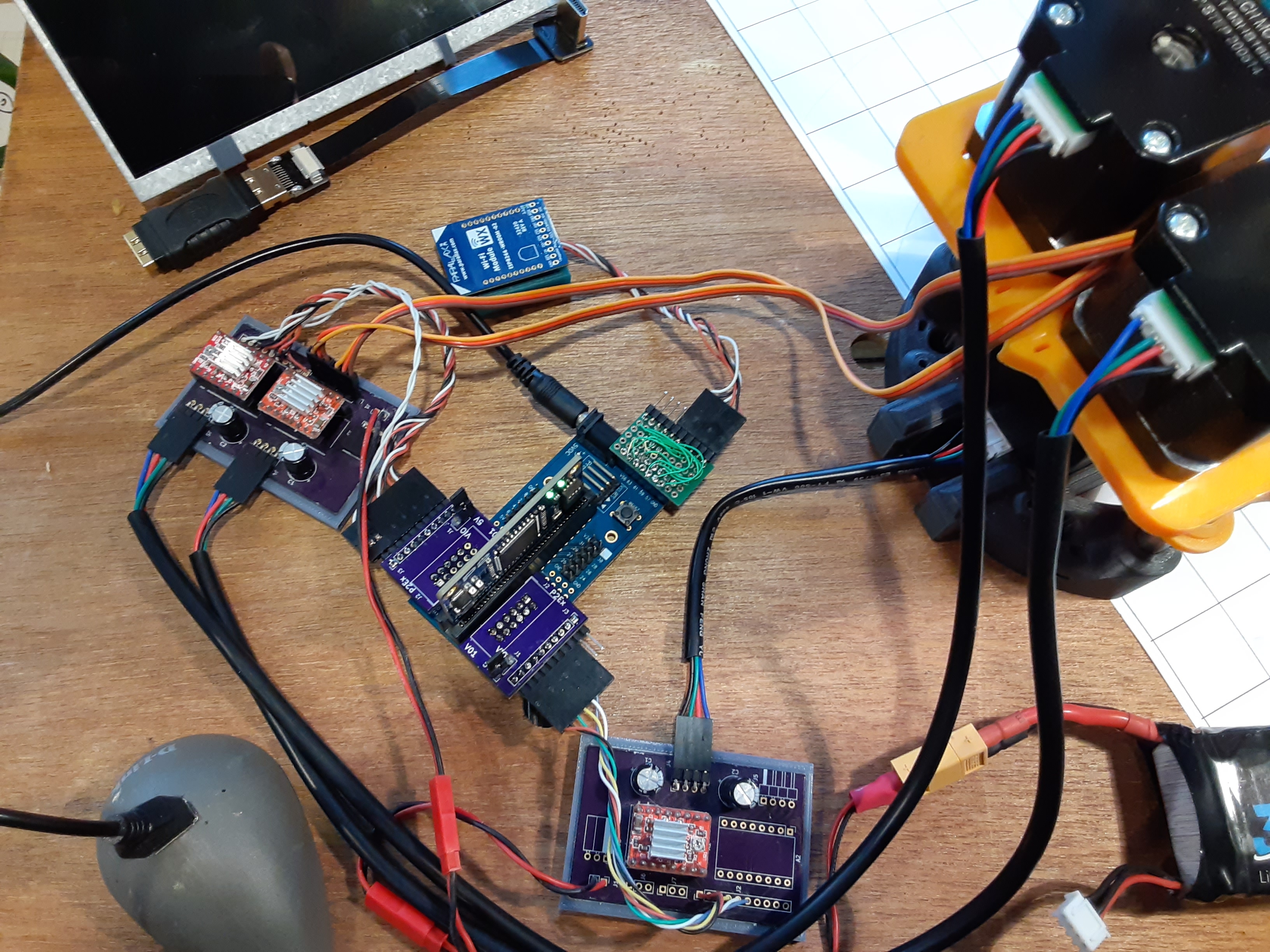
I converted my P1 SCARA code over to the P2.
Had to make a couple of changes to get the code to work since smart pins were needed and cog_run was different on the P2.
I also used my P2Ex expansion plugs to work with my Plug and Play modules.
I have a video of it moving the SCARA about picking up pieces that are 5mm thick.
Here is the C code that move the SCARA:
I have created several libraries for devices used on the P2. Custom P2 Libraries
Here is a video of SCARA doing the Tower: P2 SCARA
Mike
Had to make a couple of changes to get the code to work since smart pins were needed and cog_run was different on the P2.
I also used my P2Ex expansion plugs to work with my Plug and Play modules.
I have a video of it moving the SCARA about picking up pieces that are 5mm thick.
Here is the C code that move the SCARA:
#include <stdio.h>
#include <propeller.h>
#include "JSON.h"
#include "step.h"
#include "servos.h"
void doClaw(void *);
void setAngles(int, int, int);
void Claw(int);
void OpenClose(int);
#define ENABLEA 8
#define STEPA 9
#define DIRECTIONA 10
#define ENABLEB 11
#define STEPB 12
#define DIRECTIONB 13
#define ENABLEC 16
#define STEPC 17
#define DIRECTIONC 18
#define SERVO1 14
#define SERVO2 15
int Steps_s, Steps_e, Steps_h;
int ElbowOffset;
volatile int CW;
char Buffer[256];
char *x;
int Motor_s, Motor_e, Motor_h;
int Stack[50];
int main(int argc, char**argv)
{
int i, j;
int e, s, c, h;
Motor_s = Step_Start(ENABLEA, DIRECTIONA, STEPA);
Motor_e = Step_Start(ENABLEB, DIRECTIONB, STEPB);
Motor_h = Step_Start(ENABLEC, DIRECTIONC, STEPC);
Servo_Enable(SERVO1, 1500, 20000);
Servo_Enable(SERVO2, 1500, 20000);
_cogstart(doClaw, NULL, Stack, 40);
_waitms(1000);
Claw(0);
OpenClose(0);
printf("Ready\n");
while (1)
{
getStr(Buffer, 100);
json_init(Buffer);
x = json_find("Claw");
c = atoi(x);
x = json_find("Elbow");
e = atoi(x);
x = json_find("Height");
h = atoi(x);
x = json_find("OpenClose");
i = atoi(x);
x = json_find("Shoulder");
s = atoi(x);
setAngles(s, e, h);
Claw(c);
OpenClose(i);
Step_Wait();
printf(Buffer);
printf("\n");
}
}
void OpenClose(int v)
{
if (v)
Servo_Set(SERVO2, 1500);
else
Servo_Set(SERVO2, 1000);
}
void Claw(int a)
{
CW = a * 12;
}
void doClaw(void *par)
{
int c;
c = 0;
CW = 0;
while (1)
{
if (c > CW)
c--;
if (c < CW)
c++;
Servo_Set(SERVO1, 1550 + c);
usleep(1000);
}
}
void setAngles(int s, int e, int h)
{
int offset;
int sa, ea;
offset = s * 35;
offset = offset - ElbowOffset;
ElbowOffset = ElbowOffset + offset;
sa = s * 39;
sa = sa - Steps_s;
Steps_s = Steps_s + sa;
ea = e * 64;
ea = ea - Steps_e;
Steps_e = Steps_e + ea + ElbowOffset;
Steps_h = -h * 400;
Step_Step(Motor_e, Steps_e);
Step_Step(Motor_h, Steps_h);
Step_Step(Motor_s, Steps_s);
usleep(100);
}
I have created several libraries for devices used on the P2. Custom P2 Libraries
Here is a video of SCARA doing the Tower: P2 SCARA
Mike
3264 x 2448 - 2M
Comments