

RemoteControl with Gripper 3.0 Close Okay Issue with Open - Servo Not Responding-Program Issue
 aedford1551
Posts: 32
aedford1551
Posts: 32
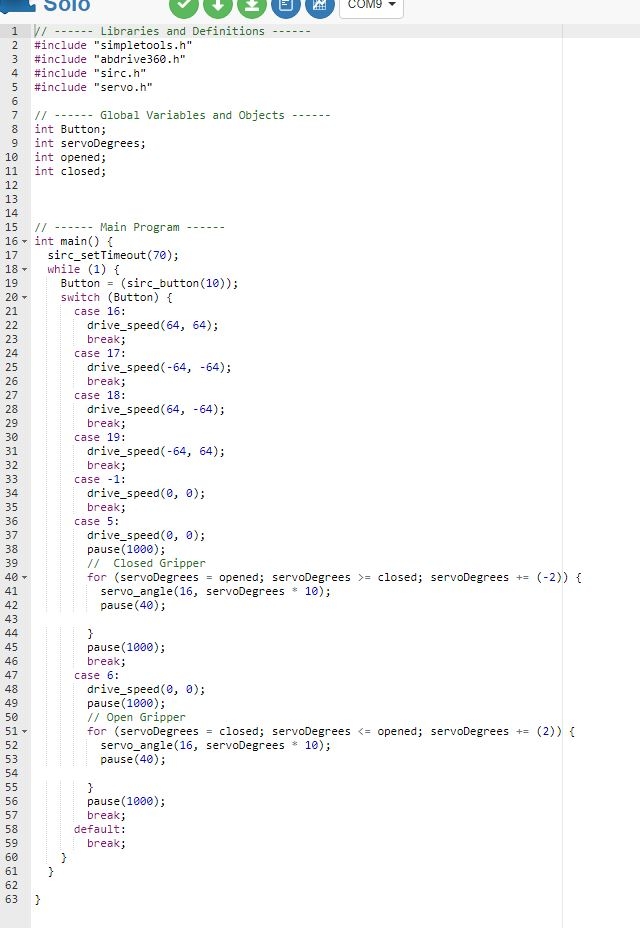
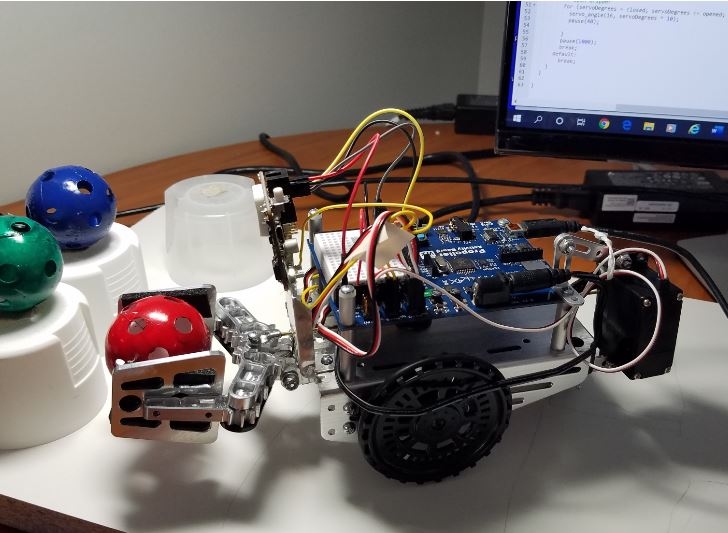
Remote ( Brightstar from Parallax #29122)) works okay - receiver test code , gripper test code okay, drive code okay but when I add the gripper code to the drive code ( see attached ) servo does not respond to CASE 6 ; all other cases work fine; It complies and loads into Ram ( one time ) but when I depress button 6 ( after the gripper picks up ball - button 5))- no response . I tried it without the ball - gripper closes okay but still no response with button 6
How do I get the gripper to drop the ball ( " sounds like my dog ")
How do I get the gripper to drop the ball ( " sounds like my dog ")

675 x 932 - 70K
640 x 928 - 77K
728 x 533 - 69K
Comments
If it is then there may be something binding in the gripper mechanism. Can you manually open and close the gripper (rod still detatched)? Is there any resistance to opening?
Tom
A couple of things to try:
Choose a different key and case value to see if that can make the servo open the gripper.
Or connect a LED and resistor to the servo control pin (pin 16) and add some code to case 6 to light the LED when you press that key.
All good ideas
I'll work thru them
Happy 4th
I guessed wrong. The assembly instructions show that open should be set to the value of 160 and closed set to 80. I forgot that C variables when declared default to 0. So the program was over setting or trying to overset the servo to 0 degrees when closing, but never getting a command to open.