

Using DHB-10 with Arduino Mega

Hi,
I am trying to use the DHB-10 with the Arduino Mega. I'm running this script here, https://learn.parallax.com/tutorials/robot/arlo/arlo-arduino-uno-boe-shield-brain/test-shield-electrical-connections/test
I am not using a BOE shield; I am just making the individual connections myself.
When I run the test with my Propeller to DHB-10 connection, I get the correct FWVER = 10 and HWVER = 1. When I try to run the test between the Arduino and DHB-10 from the link above, I keep getting FWVER = 0, HWVER = 0.
I am using this previous Parallax forum post for reference: https://forums.parallax.com/discussion/166289/dhb-10-with-raspberry-pi-3
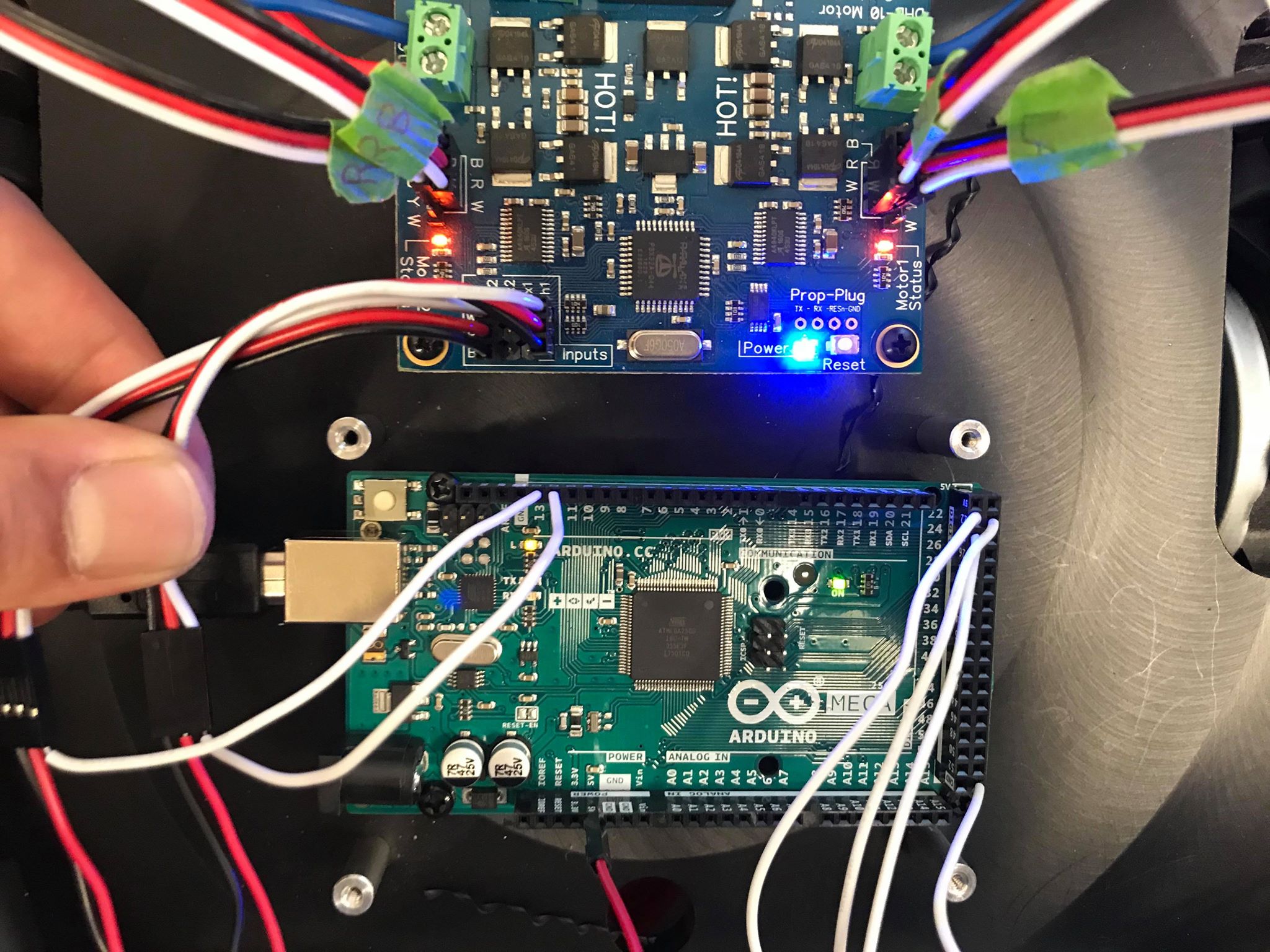
From the DHB 10, I connect the red from both Channel 1 and Channel 2 into a 5V from the arduino. I connect the black from both Ch1, Ch2 into a GND from the arduino. I connect the White from CH 1 to TX pin (defined 12 in the test) digital 12 on the Mega, and the White from CH 2 to RX pin (defined 13 in the test) digital 13 on the mega. I switched both in case I got TX/RX messed up, but both times I cannot get the test to pass.
Can someone give any insight? Thanks. I have attached a picture of my connections in the post.
_ _ _ _
EDIT 1:
So I learned that the B and W pin on the DHB-10 are not connected to anything. I used just a single female to female to connect both CH1 and CH2 to pins P12 and P13 on the activity board, and was successfully run the .side file and return the correct FWVER and HWVER. When I try this with the Arduino Mega, connect it to my pins 12 and 13, still I get HWVER/FWVER = 0.
I am trying to use the DHB-10 with the Arduino Mega. I'm running this script here, https://learn.parallax.com/tutorials/robot/arlo/arlo-arduino-uno-boe-shield-brain/test-shield-electrical-connections/test
I am not using a BOE shield; I am just making the individual connections myself.
When I run the test with my Propeller to DHB-10 connection, I get the correct FWVER = 10 and HWVER = 1. When I try to run the test between the Arduino and DHB-10 from the link above, I keep getting FWVER = 0, HWVER = 0.
I am using this previous Parallax forum post for reference: https://forums.parallax.com/discussion/166289/dhb-10-with-raspberry-pi-3
From the DHB 10, I connect the red from both Channel 1 and Channel 2 into a 5V from the arduino. I connect the black from both Ch1, Ch2 into a GND from the arduino. I connect the White from CH 1 to TX pin (defined 12 in the test) digital 12 on the Mega, and the White from CH 2 to RX pin (defined 13 in the test) digital 13 on the mega. I switched both in case I got TX/RX messed up, but both times I cannot get the test to pass.
Can someone give any insight? Thanks. I have attached a picture of my connections in the post.
_ _ _ _
EDIT 1:
So I learned that the B and W pin on the DHB-10 are not connected to anything. I used just a single female to female to connect both CH1 and CH2 to pins P12 and P13 on the activity board, and was successfully run the .side file and return the correct FWVER and HWVER. When I try this with the Arduino Mega, connect it to my pins 12 and 13, still I get HWVER/FWVER = 0.
2048 x 1536 - 463K
Comments
I ran the TROUBLESHOOTING test given by Parallax at this link here: http://learn.parallax.com/tutorials/robot/arlo/arlo-arduino-uno-boe-shield-brain/troubleshooting-your-arlo-boe-shield.
So I have confirmed that I am indeed getting a reply from the DHB-10 however it is by no means correct. At least I am one step closer and know that they are communicating. See picture:
I think you mean B and R, but actually B is connected. Only R is not.
Here's a summary:
B - is connected to GND on the DHB10, and for reliable communications it is recommended to connect those to your microcontroller board, ideally close to the where you are connecting the W cable.
R - is typically voltage, but you are correct, R is NOT connected to anything on DHB-10 at the CH1 and CH2 pins because these are for data only.
W - is the signal wire, and accepts PWM or TTL serial signals from your microcontroller board.
If you connect up the two B (gnd) pins between DHB10 and your microcontroller, does that help ?
For the Mega connection, I would start by trying to make the connections as short as possible, and include that GND connection from DHB-10 to the GND header next to Mega's P12-P13, and see if that helps.
Hi, thanks' for that advice; I did not know that. So what I did this time was I connected the W pins to P12-P13 on the mega, and then I also connected them to the ground terminals on the Mega. It seems I am getting the correct HWVER = 10, but there is a strange 'Y' string in the output. I have to re-set the board to have the blinking orange lights turn on again before I re-run the test, otherwise it goes back to HWVER = 0. The blinking orange lights on the DHB-10 turn off everytime I upload into my mega, I'm not sure if that means anything. (That also happens with the DHB-10 to Propeller WX so I doubt it.)
Now just need to try some things to get the FWVER right. Any other suggestions / different connections I could try?
Thanks much,
Matthew
EDIT again, yet it is not 100% either on my end. It will sometimes still fail.
What happens if you repeat the code line that calls the firmware ver ?
int fwver = Arlo.readFirmwareVer(); // Check DHB-10 firmware fwver = Arlo.readFirmwareVer(); // Check DHB-10 firmware again! Serial.print("fwver = "); // Display firmware version Serial.println(fwver, DEC);Did you solve this issue ?
Another forum member just asked a similar question.
http://forums.parallax.com/discussion/168891/problem-with-dhb-10-and-arduino-shield
It looks like you are sending the command OK (because DHB-10 replies), but your MEGA is not interpreting the reply correctly. Do you have an internal pull-up enabled (or external pull-up resistor) on the MEGA RX pin ? Could you try disabling that ?
Sorry, I was taking a small break from working on my project but I just saw that new post and replied. I bought the BOE shield and tested the connection, however my message still shows as previously before. But, as I also commented on the other post, I passed the Motor Connections test and the Encoders Test. The wheels span, and I also got correct encoder readings on the serial terminal. So I'm wondering if I can just move on. It is unsettling though. I am going to try a few more configurations to see what may come out as a solution. I am running this off of Ubuntu 16.04, and I was having a few problems earlier verifying each sketch. There was an issue with the ArloRobot library in the source code, when it called #include arduino.h. I had to change it to #include Arduino.h in order for it to properly work without errors. However when I run it off of windows, I don't get a problem with just #include arudino.h. I will check now to see what my luck is on my Windows system.
Also, testing on my windows system, the following Encoder tests still pass, but I am still getting failures on interpreting the reply; and this is with having tweaked none of parallax's code in ArloRobot.h.
I realize that this thread is somewhat old, however I am having the same communication problem between either my Arduino Uno and my 2560 Mega and the DHB-10.
I have followed the Troubleshooting Your Arlo + BOE Shield Guide
Both the Uno and the Meg transmit successfully to the DHB-10 and receive successfully from the DHB-10. However both the firmware and hardware responses are definitely received, but are garbled.
I get the following response:
fwver = 0
VER\r \r
hwver = 1
HWVER\r 1\r
The fwver = 0 response is obviously wrong, however the hwver =1 is correct.
Changing the Arduino program code to request both the firmware version and the hardware version twice in a row definitely improved the receive function and I could somewhat tell that the firmware version is 10 and hardware version is 1.
I definitely believe that the Propeller cannot pull down the Arduino Uno/Mega pin 12 input (which has around a 20k pull up resistor) to 0 volts sufficiently for reliable communication. I suspect that a level shifter to convert the Propeller serial output from 3.3v to 5v will possibly solve the problem. If so, where can I conveniently pick off 3.3vdc from the DHB-10 board to supply the low voltage for a 3.3v to 5v level shifter.
Comments?
Regards,
TCIII
That was tried on the other thread concerning Arduino Uno communication with the DHB-10 and it did not improve the communication whether the pull up resistor was enabled or disabled. The Propeller Serial Tx line just can't pull the Arduino Rx input to or near 0 v. Therefore a level shifter will probably have to be used to overcome this issue.
Regards,
TCIII
I sent Parallax Support an email documenting the Propeller to Arduino communication issue as it has evolved in this thread yesterday.
Today I verbally followed up my email with a telephone call to Parallax Tech Support. I reiterated what I had sent in my previous day's email and the support tech indicated that they are aware of the Propeller to Arduino communication issue.
Apparently they are working on a solution, however that will not help those of us who have already purchased a DHB-10.
Hopefully they might come out with instructions on how to insert a level shifter between the Propeller and the Arduinos to insure that the Arduinos will be able to accurately receive Propeller serial communication.
Regards,
TCIII AVD
I did disable it but I got the same result. The way to do this in code, I believe, is to simply set the input pin to LOW with the following:
What I'm unsure of is if this is effective while still using the SoftwareSerial library to define the pins which is what the Parallax provided sketch uses. Adding pin definitions within the context of using the SoftwareSerial may give me unreliable results. Indeed, It didn't work at all unfortunately.
You did my work for me! now I feel bad. I was going to call support but got busy with pre-holiday accounting work for my business. So thank you for posting about your call and email to Parallax support. I have a couple of stamp BOE boards and a propeller stick that I got several years ago. I'm not against using any of those for the initial stages of development just to get things moving. I also had no trouble using standard PWM to get the motors moving so there is no reason why I can't compromise at this early stage of dev. Long term I'd prefer to have the Arduino in the chain, partly because it works well with my Jetson nano.
I'll research possible propeller to Nvidia Jetson Nano integration. As of now, because of your call to Parallax and the known problem (which is not documented in the tutorial) I will consider the matter unsolvable and move on to an alternate path.
Makes sense. And measuring the Arudino IO to ensure the pullup is really disabled would seem most important to solving the unknowns.