

Control of TCP muscles using Takagi–Sugeno–Kang fuzzy inference system
 mohsenjafarzadeh
Posts: 1
mohsenjafarzadeh
Posts: 1
in Robotics
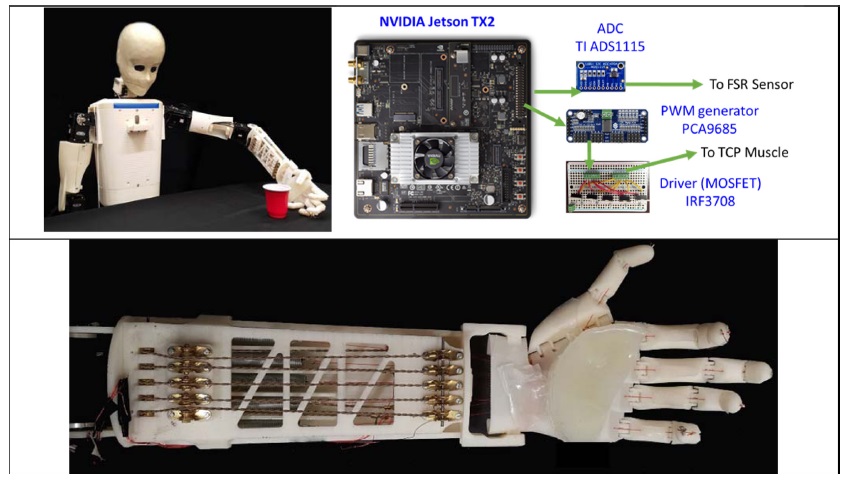
The objective of “Control of TCP muscles using Takagi–Sugeno–Kang fuzzy inference system” is to control the force of a Twisted and coiled polymer (TCP) actuator in a short period (i.e., small settling time), without applying high voltage and without breaking the actuator. In addition, the controllers must run in a commonly available digital microprocessor/microcontroller using analog to digital converter (ADC) and digital to analog converter (DAC) for practical implementation. Moreover, the controllers must be robust and work in the presence of sensor noise and disturbance. Our methodology is to use black-box system identification to find the order of the actuator, model the system as a discrete-time state space system, estimate the state space parameters with the prediction error method (PEM), use a digital PI controller to ensure a robust closed-loop system and short time to steady-state, and use Takagi–Sugeno–Kang (TSK) to design a faster digital controller.
There are four important target in modeling and control of TCP actuators:
(1) Determining the force of an actuator in response to voltage for different geometries,
(2) Modelling the system in observable form and discrete-time,
(3) Designing digital controllers
(4) Increasing the speed of actuation without decreasing the actuator lifetime.
There are four important target in modeling and control of TCP actuators:
(1) Determining the force of an actuator in response to voltage for different geometries,
(2) Modelling the system in observable form and discrete-time,
(3) Designing digital controllers
(4) Increasing the speed of actuation without decreasing the actuator lifetime.
848 x 486 - 105K