

Ping Ultrasonic distance sensor efficiency depending on angle detection ?

Hi all,
I have a little problem with my activity bot which has an ultrasonic distance sensor to avoid obstacles.
In fact , everything is working well when the wall is exactly in front of the sensor.
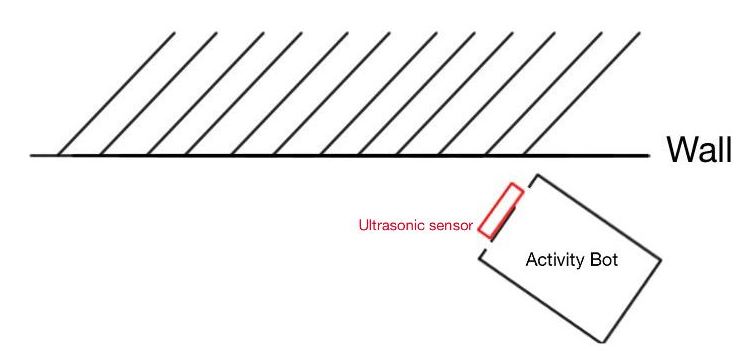
But when the robot is arriving at an angle like in the picture below , the detection is not working and the robot hits the wall most of the time :
I tried with a high value of detection distance but it's the same problem..
Do you have an idea about this issue ?
Is it possible to improve the accuracy of this sensor?
Thanks in advance,
Alex.
I have a little problem with my activity bot which has an ultrasonic distance sensor to avoid obstacles.
In fact , everything is working well when the wall is exactly in front of the sensor.
But when the robot is arriving at an angle like in the picture below , the detection is not working and the robot hits the wall most of the time :
I tried with a high value of detection distance but it's the same problem..
Do you have an idea about this issue ?
Is it possible to improve the accuracy of this sensor?
Thanks in advance,
Alex.
739 x 351 - 23K
Comments
-Phil
Look at the the Ping))) Tests section... It says
"The PING))) sensor's echo-location works on objects that can effectively reflect sound back at the sensor, from up to 3.3 meters away. Small objects don't reflect back enough sound. Hard-surfaced cylinders, ball-shaped obstacles, and walls if faced directly, work well. Walls that are approached at glancing angle will simply reflect the sound further away instead of back at the PING))) sensor. Soft items such as curtains and stuffed animals tend to muffle the sound and not bounce the echo.
For obstacles that do reflect sound back, the PING))) sensor and ping library provide centimeter distance measurements in the 3 cm to 3 m range. Air temperature can affect the accuracy of these distance measurements."
https://www.aaas.org/news/bats-have-vertical-blind-spot-when-using-echolocation
I understand , it's a physic limit of this sensor.
Thank you very much all for your answers.
It makes for a terrific challenge to integrate the sweep with real-time detection and forward motion, but this is what robotics is all about.
Spoken like the Robo-Guru you are Gordon!
@alex93: "Sensor Fusion" is a terrific buzzword, meaning relying on a combination of sensors. Parallax sells a bracket to mount both a PING sensor and a Sharp IR sensor in close proximity. They measure distance by different means, occasionally one will catch something the other misses. AFAIK these are used in stationary positions (often with MANY unit$ around the periphery of a circular robot), but with some grit, verve and moxy, one could scan both sensors together using one servo.
https://www.parallax.com/sites/default/files/downloads/725-28915-Alum-Stand-Sharp-IR-Sensor-and-Ping-v1.0.pdf
If you do I suspect there might be a reason bats don't live there
-Phil
Or are they? Another question might be obstacle avoidance behaviors in rural vs urban echolocators.
Fun stuff. Somebody go do it.
But a building is not a cliff.
I used to be upset as kid by the birds breaking their bones as they smashed into a large window on one side of our living room, expecting to be able to fly through and out the large window on the other side.
Though not directly related, one time an adult barn owl smashed into our living room window -- on his way to try to snatch up our very large and fully-grown house cat. The poor owl saw something juicy, and decided to order for take-out. (Owls often concuss larger prey, then come back later to pick them apart.)
The next morning, we found the wounded owl huddled near the house and took it into a local vet who has a contract with the city for mending such things. Apparently the owl wasn't too damaged.
Happens about twice a year on our large bay window also.
Mike
This is interesting too - https://newatlas.com/bird-protection-glass/16107/
I wonder how a Ping))) would interact with a screen material? Might be fun to test. Would there be enough "surface" to make a reflection or would it be "invisible" to reflections?
Lastly, would this be Ping))) resistant?
See - https://en.wikipedia.org/wiki/Stealth_technology