

Custom Parallax C3Bot

I re-purposed a "Robot Shield w/ Arduino" kit tonight since I just never did get into the Arduino. So I took the Parallax C3 board I had, stuck it on the chassis, mounted the PING))) Mounting bracket kit, and the Tank Tread kit. Here's to hoping I can get it working good and improve my programming skills! ")
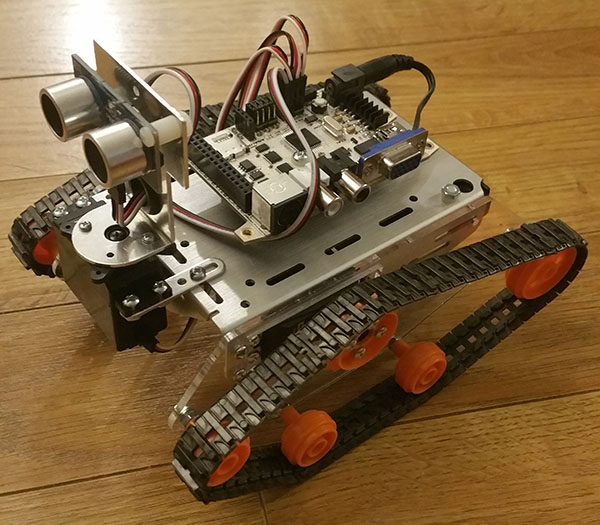
600 x 525 - 111K
Comments
Thanks for your vote of confidence, Erco! I sometimes follow your posts on here, wish I had half the robotics knowledge you've amassed.
I played around with it a little last night, got the Ping))) to work when I figured out which pin it was hooked to on the C3 and changed the code. I haven't got it to drive yet, so I must be doing something wrong. Not sure if it's because the pin numbers are different for the servo connectors or if it's because the C3Bot doesn't have encoders like the ActivityBot does. My regular ActivityBot works awesome, and I was just trying to port the code over to the "C3Bot" but obviously I will have to change a lot of things to make it work, I guess.
Welcome to someone who came from the other side.
A lot of potential possibility's there now. You have the space and the power to use it. Now the real fun begins.
Thanks!
Oh well. I guess maybe I should just save the C3 for some other project and use the regular Activity Board WX on the regular ActivityBot I have for now.
Honestly, after reading tons of posts on here, I think I'm going to have to bite the bullet and start from scratch. It's been a LONG time since I had any kind of physics/electronics class. I probably need to start completely over and learn from the capacitor and diode up the chain!