

OTTO / ZOWI / BOB biped robot with Propeller
 Cluso99
Posts: 18,071
Cluso99
Posts: 18,071
I found an article on the robot OTTO BOT recently.
http://otto.strikingly.com/
It is under CC-BY-SA V? license and was derived from Zowi which was derived from Bob.
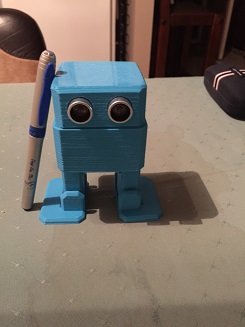
A friend of mine in New Zealand 3D printed the plastics in ABS (print files from github). He (and wife) were visiting relatives in Sydney over the holiday period. So yesterday we put the plastics, servos, speaker and Ultrasonic sensors together. While I have the Arduino Nano and Expansion boards, I have decided to go straight to using a Prop (in my case one of my P8XBlade2 boards). I plan on getting my grandsons interested and building more, including adding a rotating head and arms.
Here are a couple of pics of my assembled OTTO bot... (A pen is used for size reference)
http://otto.strikingly.com/
It is under CC-BY-SA V? license and was derived from Zowi which was derived from Bob.
A friend of mine in New Zealand 3D printed the plastics in ABS (print files from github). He (and wife) were visiting relatives in Sydney over the holiday period. So yesterday we put the plastics, servos, speaker and Ultrasonic sensors together. While I have the Arduino Nano and Expansion boards, I have decided to go straight to using a Prop (in my case one of my P8XBlade2 boards). I plan on getting my grandsons interested and building more, including adding a rotating head and arms.
Here are a couple of pics of my assembled OTTO bot... (A pen is used for size reference)

245 x 327 - 26K
245 x 327 - 26K
Comments
Jim
Ok... even if not 'Wuthering Heights', that makes some more ways to express herself.
With some full size metal servos, maybe we can get a version that can hold an Activity Board sized PCB in it's head...
Still not sure how that is possible...
Sure, side to side is easy to see, but how do they walk forward?
Anyway, I think this 4-servo approach must be simplest for walking robot, right?
It's almost 2" taller than ZOWI somehow.. Almost 8" tall...
Have you seen the two variants with arms?
I never did get mine running. I did buy the arduino mini boards but they didn't work properly - presume it was the USB power but at the time the AA battery holders were MIA in the post. Since ordered new ones but never fitted them to see if this was the problem. Always planned to use my prop board CpuBlade7 (a P8XBlade2 with some workarea) but again got distracted.
Depending on the servo mounting, flapping arms like yeti's post, or rotating arms if the servo is rotated 90 degrees to mount to the body side face.
Unfortunately, the spacing between board retainers was just a hair too small and some broke putting in the Activity Board...
Have to fix that and print again. May wait to see what else might be wrong first though...
Also, I think the feet are too weak. Had to epoxy them back together after breaking them both where the vertical parts meets the bottom.
Anyway, now I can work on porting the Arduino code over to Spin now while printing out revisions....
Also, need to find my Ping module...
Sorry, cannot remember what it was. I think it may have been the instructions on the otto website.
Anyway, its looking good. Interested to see it working
So, I guess it's actually close to my version...
Also, I see they are using something called "Bitbloq" to program it.
I looked it up and I think it is actually Blockly...
Blockly was also my plan...
So, now I see I'm just doing a copy instead of anything really new...
Still, this will let people use a Parallax board to control it.
I've got other plans too, like arms and LCD display...
Got it sorta walking forward:
Think I've decided that the feet need to be a bit wider on the bottom. This should help it walk better.
On the software side, need to copy the way zowi updates servo positions. It moves them like a sine wave. The walking is actually sorta a repeated wave motion... I'm using the servo32 "Ramp" function, but it doesn't seem to work as nicely.
So, they're more "moonwalking" than "walking".
Looks like the left leg is sliding rather than lifting. Perhaps the body needs to move weight more onto the right leg to lift the left leg. Ie it doesn't look symmetrical.
Still testing, but I think I need slightly wider feet to make it better.
I guess once you have a 3D Printer working, its easy enough to print new feet. Worth a try
Keep us updated, thanks.
It took more work than I thought to implement sin and cos inside Spin. Maybe there's an easy way? I had to write an assembly driver and use a cog to serve up sin values...
BTW: It turns out that speed is also a factor. Only one foot gets lifted if slowed down...
Anyway, I'll print out new feet soon and it should be even better...
Were you using the ROM sine table?
Hmm... Just noticed the Zowi code also includes an offset that I don't have yet...
Might not need new feet after all...
Would you like to post your code? Perhaps I can find the time to try it out
I've used this Spin code before for sine, the argument is in units of pi/4096 I think, and the output is 65535 * sine (a*pi/4096)
[probably]
PUB computeSIN (a) | revs, sign, val revs := a & $800 sign := a & $1000 a &= $7FF if revs a := $800 - a val := word [$E000][a] if sign result := -val else result := val