

TEMPER Robot Update:

Just wanted to give any interested forum members an update on what I have done lately with my robot,
Gimbal joystick control with high resolution in steering and throttle.
4.8vdc to 12vdc step up convertion for B&W WA HD Camera and 400mw FPV transmitter. gives a good 90 minutes run time.
XBee-PRO 900HP long range radio's.
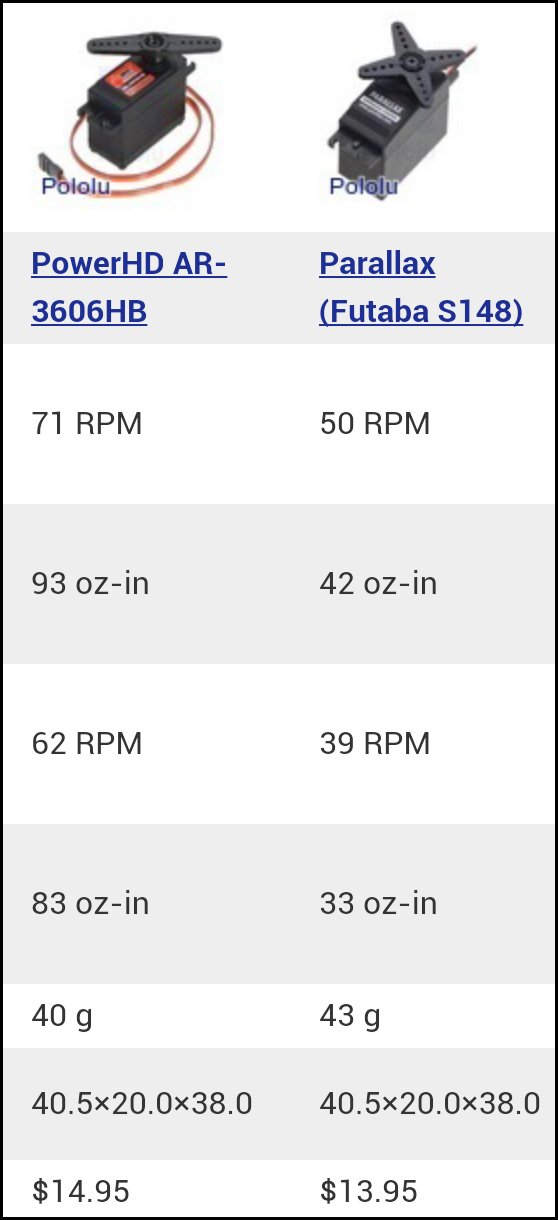
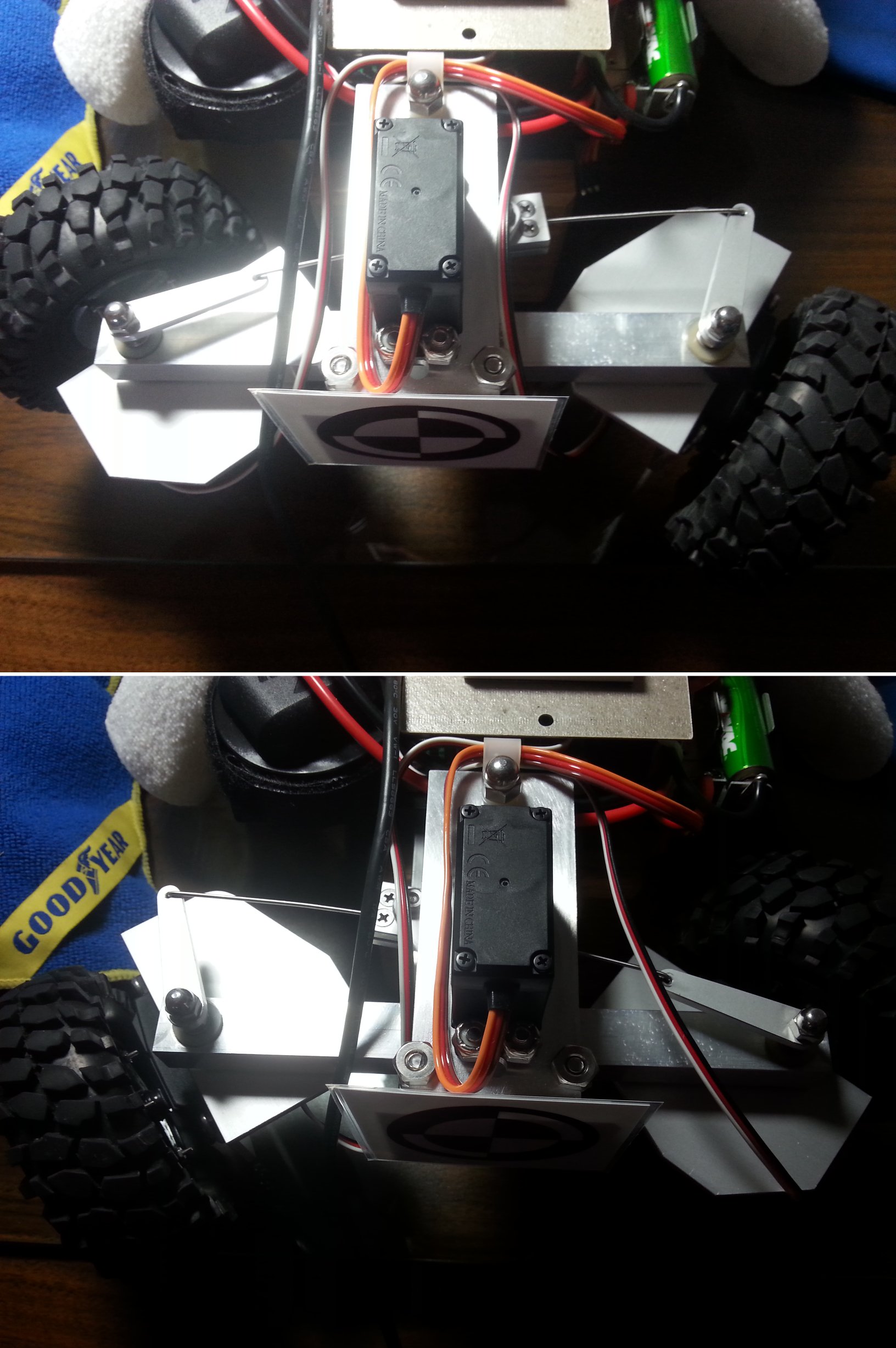
High speed, high torque servo motors. these servo's from Pololu Robotics are shown being tested.
And also I am working on the recieving end by incorporating OSD over FPV, i.e. video overlay of sensor data.
After adjusting my steering linkage to full Ackermann steering geometry, I decided not to re-code and test because because of the limited turning radius.
Some things I need to accomplish are: dedicated control boards, water resistant housing and try to make the servo motors water resistant. After all my original idea was to monitor the enviroment in my general area.
I will keep this thread updated of my progress,
Just in case anybody thought my P.O.C. was'nt sufficiently substantiated.
Mike
Gimbal joystick control with high resolution in steering and throttle.
4.8vdc to 12vdc step up convertion for B&W WA HD Camera and 400mw FPV transmitter. gives a good 90 minutes run time.
XBee-PRO 900HP long range radio's.
High speed, high torque servo motors. these servo's from Pololu Robotics are shown being tested.
And also I am working on the recieving end by incorporating OSD over FPV, i.e. video overlay of sensor data.
After adjusting my steering linkage to full Ackermann steering geometry, I decided not to re-code and test because because of the limited turning radius.
Some things I need to accomplish are: dedicated control boards, water resistant housing and try to make the servo motors water resistant. After all my original idea was to monitor the enviroment in my general area.
I will keep this thread updated of my progress,
Just in case anybody thought my P.O.C. was'nt sufficiently substantiated.
Mike

1824 x 1368 - 460K

200 x 192 - 9K
558 x 1220 - 63K
1632 x 2454 - 397K
Comments
Related, I just got front wheel alignments on both of our cars. It's mainly just for peace of mind, kinda like an oil change. In your mind, you know it's the right thing to do, but there's no visible or tangible difference after the service. Hard to know if there's any savings in tire life or gas mileage.
But at any rate it was fun to watch the laser light show from the fancy schmancy alignment machine. I know that was a pricey piece of hardware.
-Phil
I had new tires and an alignment two years ago when the front end seemed solid, bought new tires again after replacing both front hubs and tie rod ends, another alignment is next.
Mike
TEMPER Avalable Sensors;
Parallax, RXM-SG GPS
Parallax, HMC5883L 3-Axis Compass
Parallax, Sensirion SHT-11, Tempurature and Humditty
Parallax, MX2125 Accelerometer
Parallax, PING))) Sensor, Forward
Parallax, PING))) Sensor, Aftward
Parallax, PIR Sensor, Port
Parallax, PIR Sensor, Starboard
Parallax, 29124 Altimeter-Barometer
Taos, TLS230 Light to Frequency
Generic Rain Sensor
Generic Sound Impact Sensor
TEMPER Misc. Outputs;
IR Headlights-on/off
WS2812 RGB LED
SD Memory Datalogger
GIS, Emic 2 Text-to-Speech Module
Piezo Speaker
Aux. Audio output
Proposed Sensors;
Geophone
Anemometor
Wind Direction
Just a short clip to show sensor values being updated on the Parallax Serial Terminal, the XBee reciever is draped over the top of the monitor with status LEDs in view, values are being updated approximatly once every few seconds. PIR and ping sensors are not included in this demo, as they are coded in a closed loop, i.e. Ping roaming and stationary PIR detection, ping turret is not mounted at this time anyway. Of course final coding will have the robot just updating sensor variables to a dedicated Propeller driven transciever with joystick, switches and HUD.
@erco, Government grant would be great, but this is too expensive of a hobby to just get blown away in the wind.
Gordon had warned of oversized servos previously. Which type are you using?
BTW Dollar Tree has 'Sunbeam' brand batteries. Four decent AA alkalines for a buck.
Or eight crappy carbon zinc AAs for a buck. "Ideal for low drain devices"
@erco I don't have a lot of test equipment, but I sure am feeling cramped these day's, you getting me started on eBay hasn't helped matters, did you ever figure out how many bales of hay fit inside a Corvair?
Temper is looking good. Not Temperamental at all.
Sorry but, I'm going to put off a video another day, production overruns yuno.
PS: Thank you erco.
https://www.pololu.com/product/2123
I cut corners while in the breadboard stage, and its time to build a power supply, so I have ample 3.3v and 5v power. I have to recharge batterys again, and I will get a video together this afternoon.
Mike
I did experience a servo failure after that video, don't think the company I bought them from would appreciate the abuse I gave them right out of the box. The darn thing started running wild, and adjustment made no difference, the pot actually fell back into the body, can't see it now. I will take it apart tomorrow and get a chance to see what their made of, I hope I don't have shop for new motors again. Got any recommendations on a HS HT CR servo?
How much weight is on each wheel? If you can't find a metal gear, dual bearing servo you may have to consider changing to gearmotor$ & H bridge$.
All I see in a quick search is these dreadful MG995 servos which (before being modded for CR) are called the world's worst servo. http://www.robotshop.com/en/metal-gear-continuous-rotation-tower-pro-servo.html?gclid=CjwKEAjw2PK7BRD
I like these from HobbyKing.
I've used them both in my HalloweenHex and in rolling robots. These are some of the easiest servos to convert to CR.
Not only are they relatively easy to convert to CR, they're actually easy to convert from CR back to normal. When I was building my HalloweenHex, I found I had converted too many of my servos to CR and I didn't have enough for the hexapod. Fortunately I had save the small parts I removed from the servo and I was able to restore several CR servos back to their original configuration.
Parallax sells a really nice CR servo. This servo can operate directly from a 2S LiPo.
These cost more than the ebay specials but they are nice and fast.
I'm not sure I'd call that a real potentiometer. It looks more like a trimpot which aren't made very durable. You could try bending the leads back straight, replacing the trimpot with a different trimpot (erco and I both like to use multiple turn trimpots in CR servos). You could also use the two resistor trick and trim the servo in software.
@erco, I just pushed a little to hard on it, and couldn't center it, it was an easy fix, these are ball bearing but not MG, so far I like them, and they are an upgrade in torque, but i'm not seeing the speed when installed on the robot. Leads me to believe I Need more current from the batterys, it is set up for a total of ten rechargeable AA's, or eight alkaline, two six volt banks.
Yes trimpot, sorry.
Looks like a nice one and at a good price, I like that it can be coverted and back again. And going to look into the two resistor trick, that would be great to do on the fly.
Thanks Duane.
Do you mean High Speed and High Torque? They usually vary inversely. For instance, Parallax has two standard-sized CR servos. The ones used in Activity Bot are higher speed (RPM) but lower torque than the original BoeBot servos, which are modded Futaba S148s.