

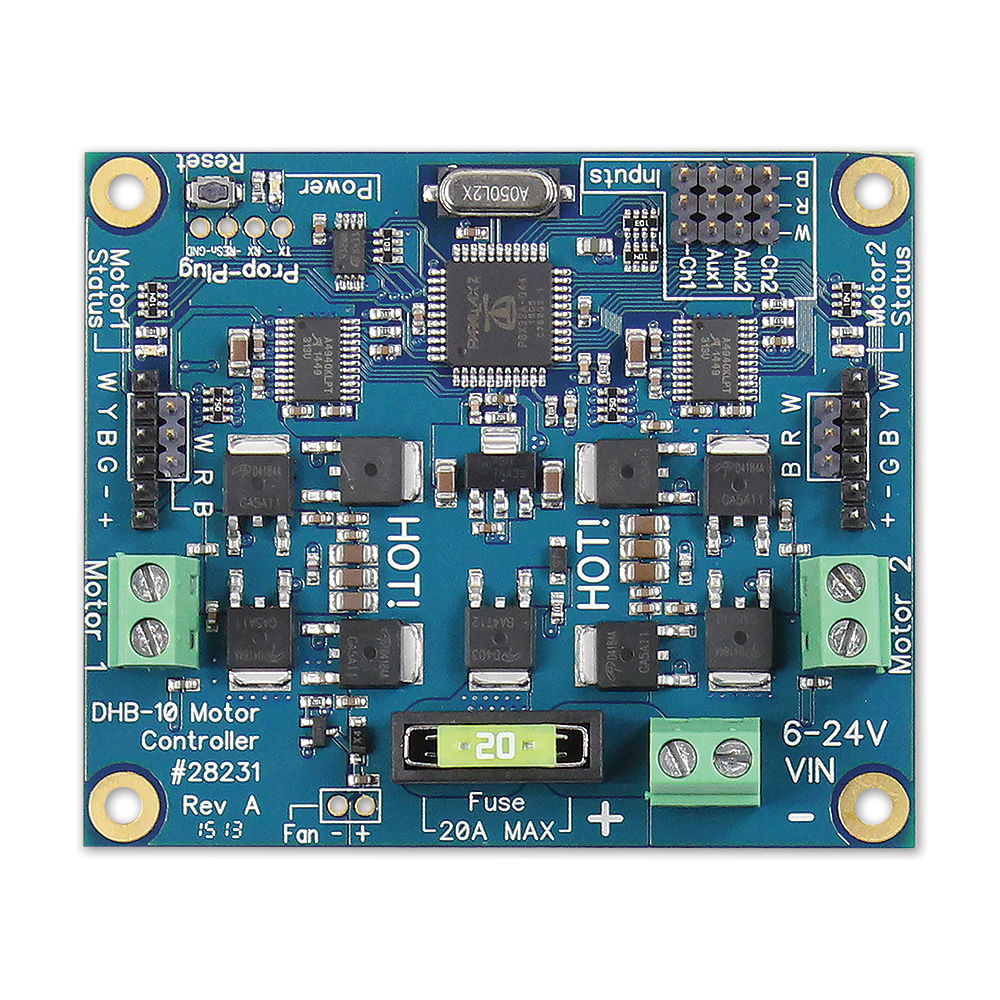
DHB-10 Dual H-Bridge
Finally cracked under the great emotional strain of the new Arlo Complete System release and ordered the DHB-10 Dual H-Bridge. It is back-ordered right now - which should give me time to study the pdf product info...
My Arlo-like version is a bit Frankenstein-ish going back to the original 12 V Wheel and Motors, MadeUSA, Eddie, etc. - even have one HDPE platform and one plywood platform! ;-)
With the new DHB-10 - I should be able to play with new stuff up on Learn.parallax.com and use my Propeller Activity Board along with the new motor controller for some "up-to-date" fun without the nifty wooden box, of course, - maybe erco can send me some scrap plywood...
My Arlo-like version is a bit Frankenstein-ish going back to the original 12 V Wheel and Motors, MadeUSA, Eddie, etc. - even have one HDPE platform and one plywood platform! ;-)
With the new DHB-10 - I should be able to play with new stuff up on Learn.parallax.com and use my Propeller Activity Board along with the new motor controller for some "up-to-date" fun without the nifty wooden box, of course, - maybe erco can send me some scrap plywood...

Comments
I'd think a lot of the Eddie code should work on it.
I haven't seen a schematic or other documentation, we all know and love from Parallax, for this board. Anyone know where the additional documentation is hiding?
Edit: After looking at the firmware in more detail, I see the current firmware has a lot of similarities to the Eddie firmware.
Product guide and firmware guide are under "Downloads & Documentation".
Trying to remember whether I have a Prop Plug... Never mind that - of course I do - I was thinking about the old clip on verson - was it the Prop-clip?
Yeah Duane - I waited a bit too long too -so in back-order - your recent thread (re: the beloved HB-25) got me fired up, but also wanting to play with new info in "Learn!"
I also downloaded the documents I could find from the product page.
I see there's a list of pins used but I don't see a schematic or BOM. I'm used to being spoiled with lots of details from Parallax.
Thank you.
https://www.parallax.com/product/28231
+1
Thanks Courtney.
I was looking at the firmware and it looks like there are a lot of similarities between the DHB-10 commands and the Eddie commands. I'm very pleased to see the firmware is written in Spin and PASM.
I'll be watching the stock on this one. I don't want to back order the board since by the time it's in stock there will likely be other things I'll want to purchase at the same time.
Yes! I like that about the firmware too (and the inclusion of some of the great ideas in the S2 Object!).
Come on Duane - go ahead and order and get a place in line - behind me, of course...
Arrived today. Absolutely beautiful construction - very well designed and feature packed - just what we've all come to love about Parallax products - love getting a package with the Parallax packing tape!
It is a very compact design too.
Jim
That does look nice!
I've been reading through the downloads and there's a lot of interesting things going on with that board.
I just ordered one for myself.
Thanks again Parallax for adding the open source files.
http://www.ebay.com/itm/Dual-H-Bridge-Stepper-Motor-Drive-Controller-Board-Module-For-Arduino-L298N-HX-/321946985089
That L298N based device is china rated at only 2A continuous, which is not sufficient for Arlo wheels. There are various other issues, but shoving all that aside, it doesn't even contain a Parallax Propeller! Perhaps good for small servos though.
One great advantage of the DHB-10 seems that the on-board Propeller might enable some creative folk to move control code directly into it. Or even daisy chained to other DHB-10's. I'm figuring the 4 IO's will enable both serial in-out and also interfacing to an RX module for use with a standard radio transmitter. I'd say the DHB-10 platform has great potential for creativity and learning well beyond the basic firmware. Young seeds with a bit of watering could grow a lot.
Sounds like a new robot challenge!
Thanks for that input, Dr. VS. Just don't get me started on the high current needs of those crazy inefficient worm drive motors. It's been a good day so far and I plan to keep it that way!
Our friend Gordon has expressed his disapproval of the L298N. Like you, I'm a sucker for the cheap prices of the h-bridge.
The mention of the lowly L298N gives me an excuse to post a video of my Mecanum wheeled robot which makes use of two of these cheap ebay boards. (Jump to 2:00 to see the robot in action.)
Absolutely. I'm sure the DHB-10 could be a stand alone robot control board. I'm not sure if there will be I/O pins to add many sensors but I'm sure a smartphone controlled Arlo, using the DHB-10 with a Bluetooth module is in my near future.
I imagine two DBH-10 boards could be used to control a Mecanum wheeled robot. If I ever have two of them, I'll likely give it a try.
I have four of these motors/encoder sets. I plan to use them to build an better version of a Mecanum wheeled robot. A pair of DHB-10 boards would make an interesting (though a bit pricey) controller for the robot. Maybe if a get another "code for parts" gig with Ken, I'll get a second DHB-10 to try it in "daisy-chain" mode.
That's so cool Duane!
Like dancing on ice!!
The motors you mention look perfect for the DHB-10, seeing as they plug straight into the DHB-10 motor headers. Too easy.
I've gotta search for some Mecanum wheels that plug onto those same shafts.
Vex makes several sizes but back when I started my project they only had one size.
Vex no long has a product page for the Mecanum wheels but you can find them listed on this page.
The wheels have Vex's square hole which is intended for use with their square axles. I drilled the Vex wheels out so the Rover 5 axles would fit in them. I also drilled a hole down through the side of the wheel so I could add a set screw. I've documented the project in the Robotics Forum and on Hackaday.io.
I think the Vex wheels are great. Erco even has a set.
The Fingertech sells a set of Mecanum wheels but they cost more than the Vex wheels and the Fingertech Mecanum wheels don't work nearly as well as the Vex Mecanum wheels.
The Rover 5 is a bit under powered to drive these wheels. I think the motors I have from Parallax will be a better fit for these wheels.