

I Fried My Elev-8's Innards
 GlassKNees
Posts: 181
GlassKNees
Posts: 181
Had a bad day a few weeks ago while troubleshooting a balky motor on my Elev-8. My quad has an APM 2.6 flight controller/autopilot and has a power module spliced in line with the battery connection and the power distribution harness. The power module's purpose is to produce clean 5V to power the APM and associated electronics - GPS/compass and telemetry transceiver. I used bullet connectors to splice the module in.
While troubleshooting, I accidentally reversed the power/ground leads of the battery connector to the power module and when I plugged in the battery, the resultant current surge melted the solder on the battery connector leads! Needless to say, everything connected to the power distribution harness was fried - all four ESCs, the APM power module and my video transmitter. Fortunately, I had previously removed the gimbal controller board so the gimbal wasn't damaged.
So, I found myself ordering a new power distribution harness and ESCs from Parallax and a Chinese clone APM power module from Amazon. what follows are my repairs:
Here is the new APM power module connected to the new wiring harness - I used bullet connectors connect them together:

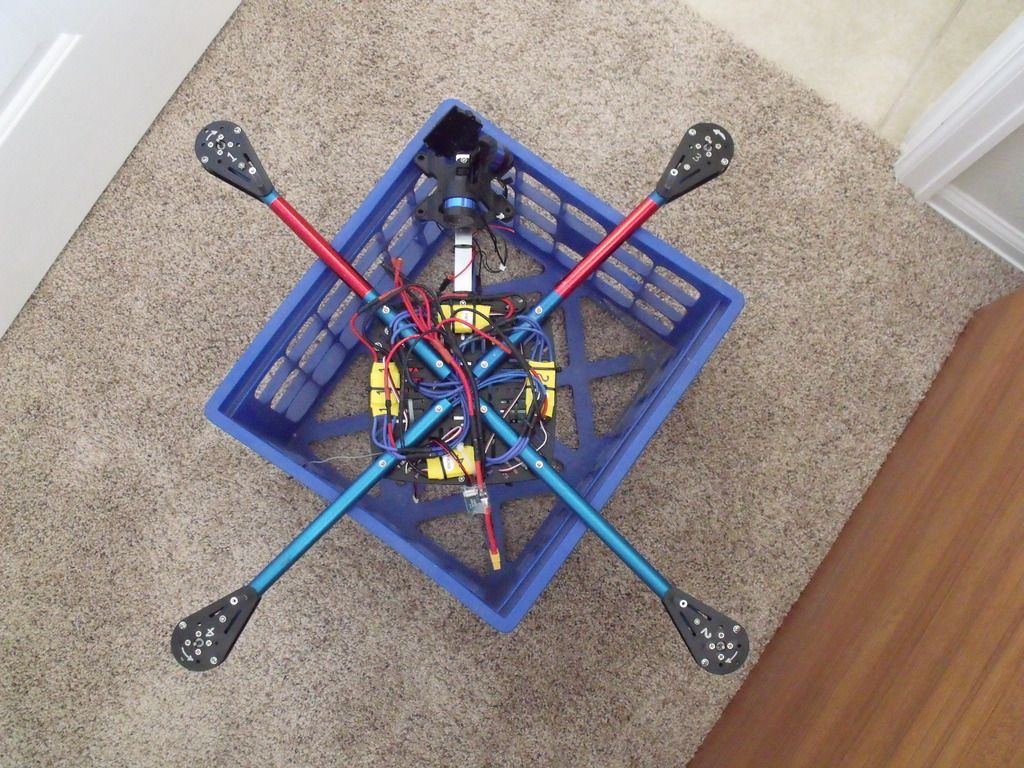
I used a plastic crate to hold the copter while I worked on its underside as I didn't want to remove the GPS mast.... After removing the old wiring harness I installed each ESC one at a time, using a spare receiver to calibrate the ESC and throttle up the motor to make sure it is spinning in the correct direction:

Here is the craft after installing all ESCs and the new wiring harness:
Finally, after installing the new gimbal control board it was time to power up the aircraft and do an all-in-one EXC calibration. I discovered that I had the gimbal motor connections reversed (easy to fix) and I didn't quite have the receiver channel connection to the gimbal correct, but that too was easy to fix. Calibration of the ESC's went without a hitch, and I was able to control the camera tilt.
Time to take it out for a test flight!
vid296.photobucket.com/albums/mm185/GlassKnees/DSCF2289_zpsi5rg9ydk.mp4
Here is the video from the aircraft:
vid296.photobucket.com/albums/mm185/GlassKnees/Test%20Flight%20Onboard%20Video_zpsrsv5eqs3.mp4
A new video transmitter should arrive next week. In the meantime, I can fly by keeping the camera in one position...
While troubleshooting, I accidentally reversed the power/ground leads of the battery connector to the power module and when I plugged in the battery, the resultant current surge melted the solder on the battery connector leads! Needless to say, everything connected to the power distribution harness was fried - all four ESCs, the APM power module and my video transmitter. Fortunately, I had previously removed the gimbal controller board so the gimbal wasn't damaged.
So, I found myself ordering a new power distribution harness and ESCs from Parallax and a Chinese clone APM power module from Amazon. what follows are my repairs:
Here is the new APM power module connected to the new wiring harness - I used bullet connectors connect them together:
I used a plastic crate to hold the copter while I worked on its underside as I didn't want to remove the GPS mast.... After removing the old wiring harness I installed each ESC one at a time, using a spare receiver to calibrate the ESC and throttle up the motor to make sure it is spinning in the correct direction:
Here is the craft after installing all ESCs and the new wiring harness:
Finally, after installing the new gimbal control board it was time to power up the aircraft and do an all-in-one EXC calibration. I discovered that I had the gimbal motor connections reversed (easy to fix) and I didn't quite have the receiver channel connection to the gimbal correct, but that too was easy to fix. Calibration of the ESC's went without a hitch, and I was able to control the camera tilt.
Time to take it out for a test flight!
vid296.photobucket.com/albums/mm185/GlassKnees/DSCF2289_zpsi5rg9ydk.mp4
Here is the video from the aircraft:
vid296.photobucket.com/albums/mm185/GlassKnees/Test%20Flight%20Onboard%20Video_zpsrsv5eqs3.mp4
A new video transmitter should arrive next week. In the meantime, I can fly by keeping the camera in one position...
Comments
Jonathan
http://wsdeans.com/products/plugs/ultra_plug.html
But the EC3's that Parallax uses are OK, but I still think it might be reversed with the right force:
http://www.motionrc.com/ec3-connectors-pair/?gclid=CjwKEAjww9O3BRDp1tq0jIP023YSJAB0-j1SyV1gveJms9Gi7XHq84MrMYPqb0M0rktEDZohhqN2QBoCQBHw_wcB
https://parallax.com/product/elev-8-v2
Took it out for a test flight - appeared to be solid. Manually flew around - pitch, yaw, roll - all seems okay. But then the aircraft settled down in auto land mode, as if it reached power failsafe. I have the failsafe voltage set to 10.5, and I'm sure that it didn't reach that. the only way to tell for sure is to check the log file or fly it again with Mission Planner running so I can see what's going on.
Meanwhile, I have to repair my other Elev-8. I received a new mount plate and GPS mast. I expect to have it ready to go again in a couple of days....
BTW, my replacement video transmitter arrived and I installed it - I now have FPV capability via my stabilized GoPro.
https://www.tripadvisor.co.uk/LocationPhotoDirectLink-g187079-d952751-i42109113-La_Tupina-Bordeaux_Gironde_Aquitaine.html
https://hknumb.wordpress.com/tag/fried-innards/
http://www.yelp.com/biz_photos/ddoong-ggo-grill-and-bar-fullerton?select=zjhNij7ycyU6KvY77hAqHQ
Well, since replacing the electrical subsystem, I've had a few flights with no problems. But then an intermittent problem showed up - the #2 motor started exhibiting the same behavior as the previous #4 motor - sputtering and stopping after attempting to throttle up for takeoff. Yesterday, I managed to get all four motors spinning and I took off, but being wary, I hovered over my front lawn about a foot or two off the ground and I'd see a momentary wobble as if the #2 motor wanted to cut out.
I removed the #2 boom and ESC, connected the ESC to a spare receiver and tried the motor - initially it sputtered and would not spin smoothly. So I tried another ESC and it worked fine - no problem with the motor. I connected the #2 ESC back again and the motor spun okay.... Both ESCs are brand new.
So now I'm suspecting something is awry with the APM flight controller. I'm going to reassemble the aircraft, but replace the wires going from the ESC to the power distribution harness.
I've ordered a new APM - need to replace the autopilot on my other Elev-8; if the problem crops up again, I put the new controller on this ship and see what happens.
BTW, 3D Robotics has discontinued the APM, so you can only get Chinese clones. I'm not too concerned about this as there are a ton of them out there. My Tarot hex has a clone APM and it's working fine....
The HoverflyOPEN flight controller is super low cost, and even the new Parallax ELEV-8 flight controller is on a crazy low introductory offer discount.
Might be worth grabbing a few parts to stock up.
If you're flying, then you're flying !
That's the main thing.
Enjoy!
Yes and no. Get an Activity Bot kit. Once you experience how easy the Propeller Micro is to work with you'll understand the capability of the Elev-8 FC.
That said, GPS is pretty high on my list of additions. I have basic NEMA parsing code already working, and I think return-to-land and position hold are actually possible within the space available on the current hardware. Waypoints and full mission planning I'm not so sure about.
BTW, I did solve my motor sputter problem. I fabricated a new set of wires going from the ESC to the motor and I replaced the motor as well. It flies great now.
My new APM arrived today, so I'll install it on my other Elev-8 tomorrow. I'm thinking of modifying the other Elev-8: replace the motors with Tarot 4006 620KV motors and 13" props. The Tarot motor mounts will fit on the Elev-8 booms and the ESCs will mount under the motors. I'll use gimbal hooks to hang a pair of 10mm carbon fiber tubes to mount a 4S battery and a Tarot 2 axis gimbal.
I'm not trying to sell you one, by the way - I think the APM is a great platform, I just want to make sure anyone who might be considering an Elev8 flight controller gets that it's absolutely NOT the same as the HoverFly boards.
This is how the Elev8-FC behaves when you turn it on after throwing it into the air - I'm not touching anything but the throttle here, initially (start it at 1:12):
The Elev8 frame will handle that too, I just chose to use a lighter airframe for the first attempt at this in case something went wrong. (this was the first time I had tried throw launching it)
As for the lack of V2 upgrade path GlassKNees speaks about, the improvements were far too beneficial to stick with the old airframe, ESCs and motors. We've not done enough to discuss the benefits of the V3 (especially the Flight Controller's expandability) but time will show this to be the best hobbyist and educational kit available.
Ken Gracey