

SegBoard / SideWay - self balancing two-wheeled skateboard
 JasonDorie
Posts: 1,930
JasonDorie
Posts: 1,930
This is still a work in progress, but it's far enough along to show it now.
It's a two-wheeled, self-balancing, electric "skateboard" thing. The brain is a Parallax Propeller (on a HoveryFly Gimbal board) running my latest Quaternion/DCM hybrid IMU code. It doesn't steer yet, but only because I haven't gotten to that part. There's no motor feedback either, so keeping it tracking straight is all done with the IMU - it adjusts the motor outputs to compensate for measured changes in heading.
Update: steering via Wii Nunchuk, and a power switch.

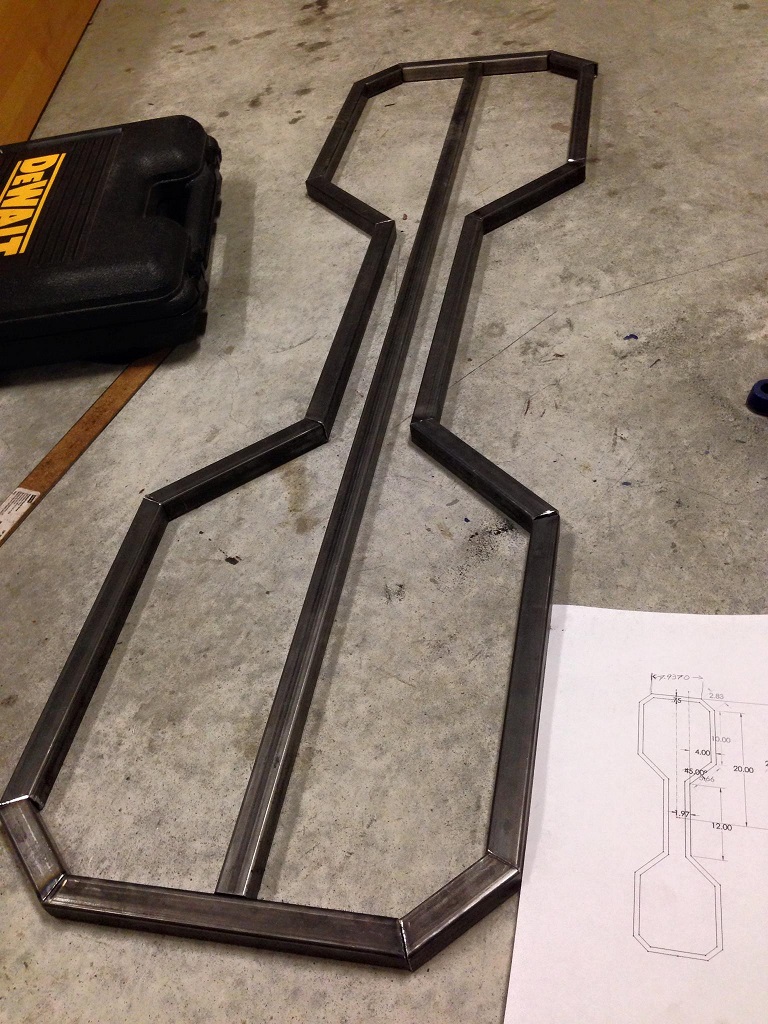
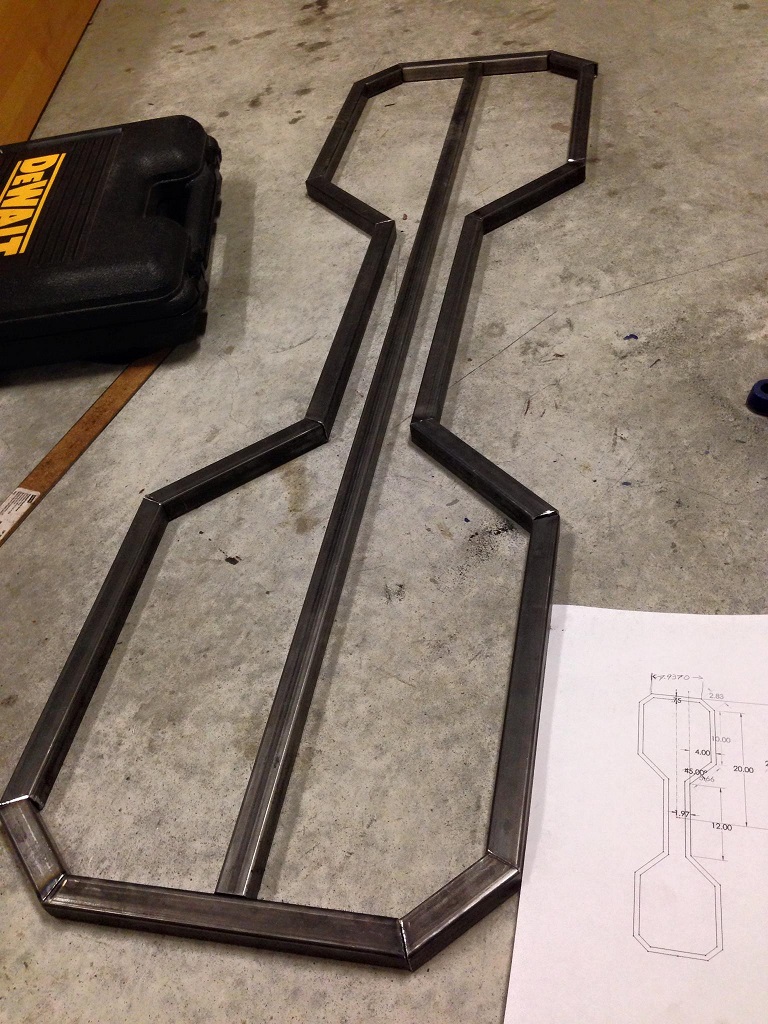
The frame parts all laid out prior to welding.
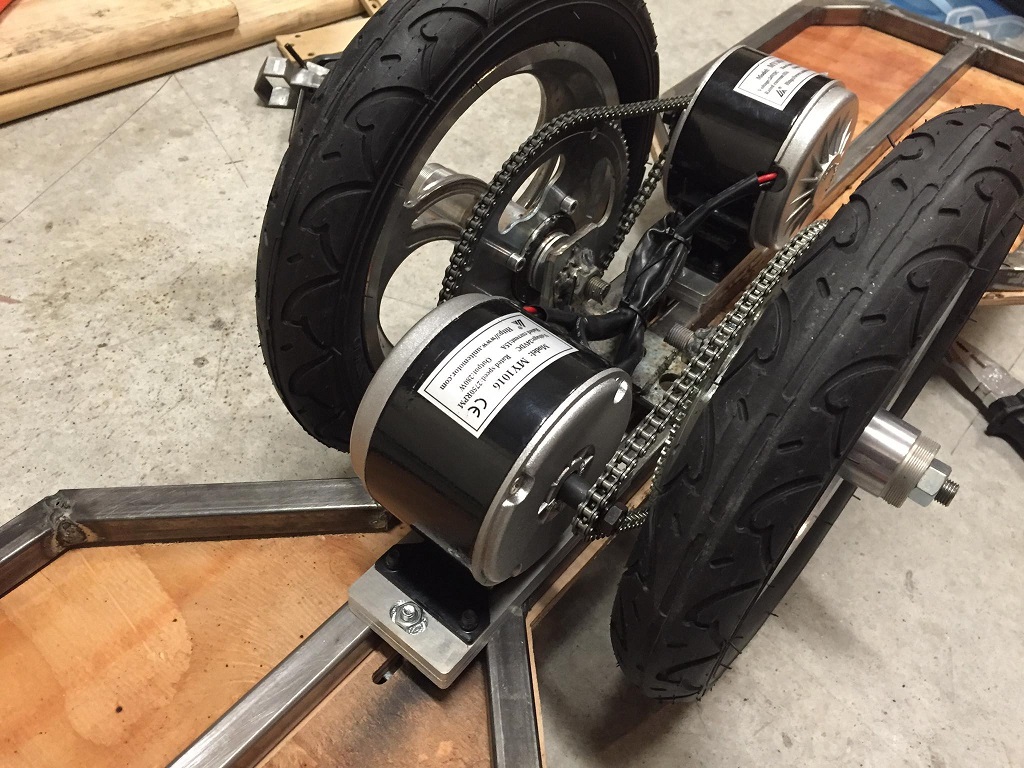
The underside of the board, showing the motors, gearing, chains, and the results of my horrible welding skills.
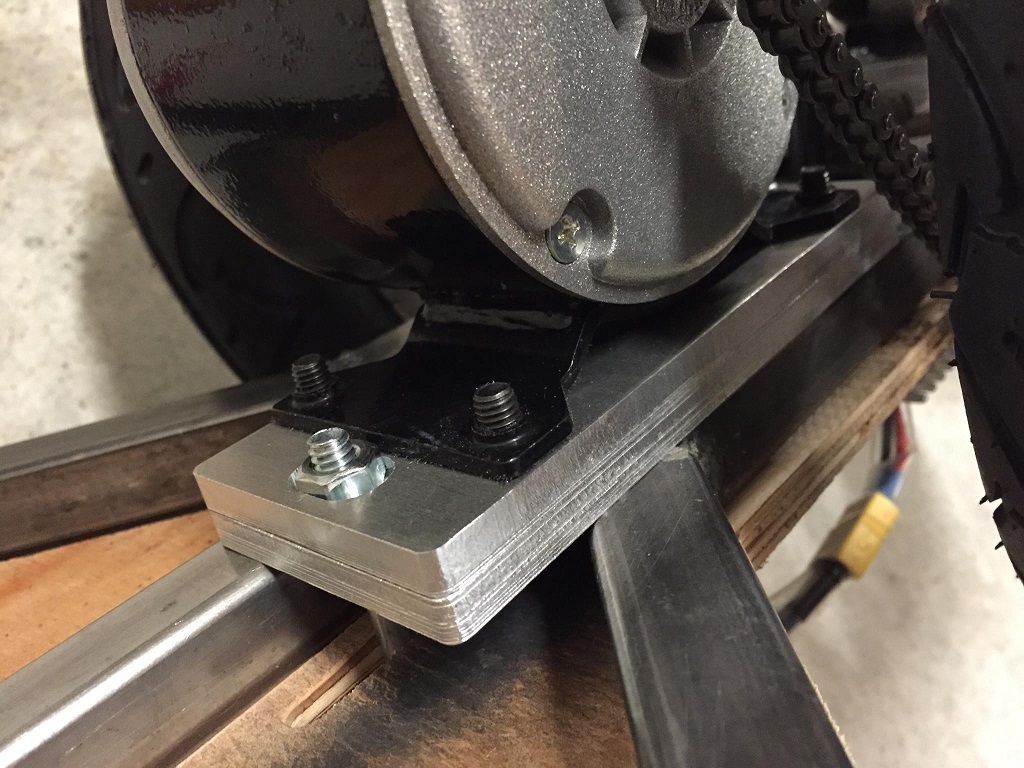
The custom motor mount plates - my very first home-CNC'd aluminum parts.
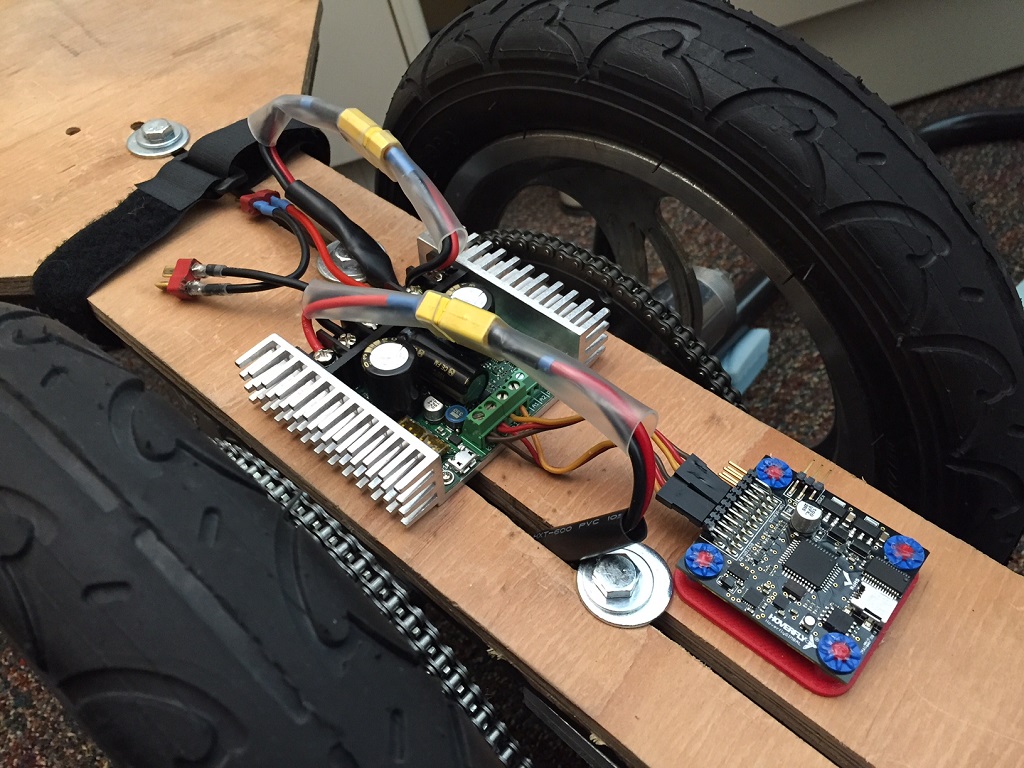
The HoverFly Gimbal board and the 2x32 Sabertooth motor controller.
It's a two-wheeled, self-balancing, electric "skateboard" thing. The brain is a Parallax Propeller (on a HoveryFly Gimbal board) running my latest Quaternion/DCM hybrid IMU code. It doesn't steer yet, but only because I haven't gotten to that part. There's no motor feedback either, so keeping it tracking straight is all done with the IMU - it adjusts the motor outputs to compensate for measured changes in heading.
Update: steering via Wii Nunchuk, and a power switch.
The frame parts all laid out prior to welding.
The underside of the board, showing the motors, gearing, chains, and the results of my horrible welding skills.
The custom motor mount plates - my very first home-CNC'd aluminum parts.
The HoverFly Gimbal board and the 2x32 Sabertooth motor controller.

1024 x 768 - 253K

1024 x 768 - 303K
768 x 1024 - 324K

1024 x 768 - 278K
Comments
I patched in to the I2C pins on the EEPROM, and the power / ground pins on the 3.3v regulator, added some hot glue for strain relief, and voila! I have steering. The Nunchuk now serves as both steering and the deadman switch. If you let go of the trigger button, or pull the cord, the board stops. A friend at work wanted to see it, so I took it for a spin through the office hallways.
Saw you going sideways this morning, now your doing doughnuts.
Great progress!
Jim
hard to find room underneath, so I reckon strengthening spars welded on top across the middle would be possible.
Or make it into a leaf spring and add bounce/suspension?
As you probably know, generic Nunchucks can vary greatly in quality. I'm guessing you're using an original Wii version.
If you want to try a wireless Nunchuck, I recommend the ones made by Kama (or is it Nyko?). Both the joystick and the accelerometer appear to work well on the two I have.
I hope you have some sort of error detection code to monitor for a disconnected Nunchuck.
Again, super cool project. Thanks for posting.
Duane - It's an authentic Nintendo controller I've had in a box along with a Wiimote for a few years. I actually don't need to monitor for a disconnect, exactly. Since the trigger button has to be held for the board to run, a disconnect results in all 1 bits on I2C, and the Nunchuk button states are inverted, so a 1 bit means "button off". A cord pull has the same effect as releasing the button - the board stops running. The intention was to handle a disconnect properly, but I didn't end up needing to. I thought about getting a wireless one, but the cord pull actually works to my advantage.
Duane, that wireless nunchuck is just what I need!