

SimGPS: ActivityBot enters the MATRIX
 Phil Pilgrim (PhiPi)
Posts: 23,514
Phil Pilgrim (PhiPi)
Posts: 23,514
Here's a program I've been working on the past couple months for the robotics class I'm teaching. The students need to learn how to navigate autonomously using GPS for an upcoming ASV (autonomous surface vehicle) project. Thes ASVs will be used to photograph the sea bottom in shallow water, recording the sea star population in light of the recent wasting disease that's spreading amongst the population.
The problem with teaching GPS navigation is that there's scant room indoors to run their bots with any meaningful lat/long range. But running outdoors comes with all kinds of bureaucratic and weather issues -- as if an ActivityBot could get far enough fast enough anyway. So I decided to write a simulation, wherein the ActivityBot stays connected to the PC. The PC runs a program that communicates with the bot and acts as a web server for the Firefox browser. It serves up the Google Earth API, and the webpage's Javascript program queries the server as to the bot's current position, heading, etc. The result is that the student's Spin program sends the SimGPS object things like individual wheel speeds. SimGPS.spin does some wheel (or thruster) odometry and responds to the user's Spin program with lat/long/course/speed/time info, as if it were getting this data from a real GPS. At the same time, the bot's track is overlain on Google Earth in real-time, so the student can see how well his/her program is performing.
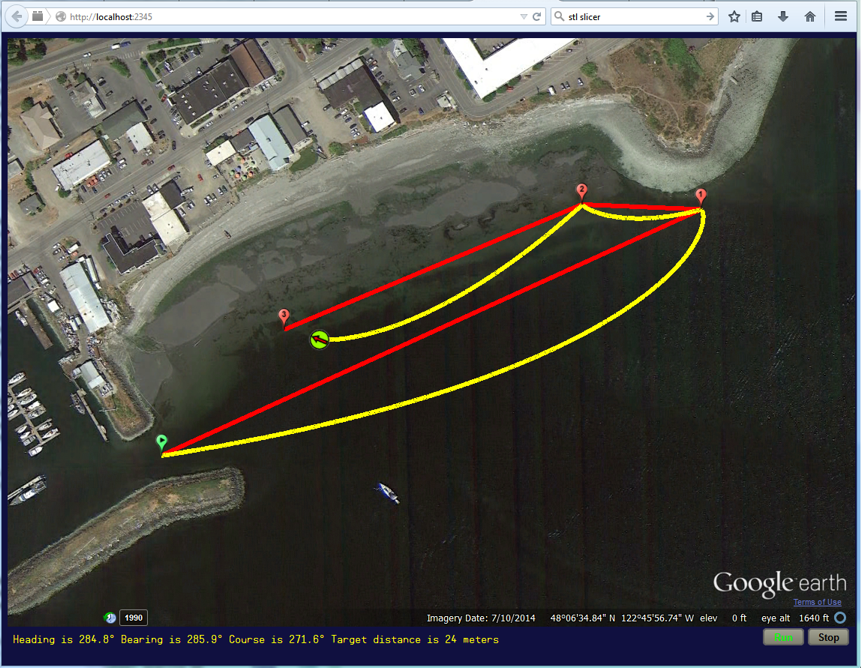
Here's a sample of the Google Earth display:

The red line is the desired track between waypoints (in this case, three, plus the starting point). The yellow line is the student's actual track. The green circle with the arrow is the student's simulated bot, showing its position and heading. The waypoints and viewpoint are specified in the main program's DAT section, along with maximum wheel speed, wheel spacing, drift (wind, current) speed and direction, and inertia. Here's the program that runs this simulation:
The lesson parameters are given in the DAT section. In this lesson, there's a strong wind blowing from the NW. The program demonstrates the simple technique of always aiming towards the next waypoint -- with the obvious consequence that it doesn't stay glued to the desired track. I gave the students the gps.set_heading method to get them started. But they will have to abandon it eventually and use the gps.wheel_speed method exclusively, just as they will for their ASVs come May.
After I started this project, I heard that Google has deprecated the Google Earth API and it will go away come December. They haven't said what they're replacing it with, so I had to go ahead and finish the project anyway. The installer for SimGPS is attached below. It installs SimGPS.exe and (to the Propeller Tool Library folder) the required external Spin objects. There's not much in the way of documentation yet, but I think most of the functionality can be inferred from the example program.
-Phil
The problem with teaching GPS navigation is that there's scant room indoors to run their bots with any meaningful lat/long range. But running outdoors comes with all kinds of bureaucratic and weather issues -- as if an ActivityBot could get far enough fast enough anyway. So I decided to write a simulation, wherein the ActivityBot stays connected to the PC. The PC runs a program that communicates with the bot and acts as a web server for the Firefox browser. It serves up the Google Earth API, and the webpage's Javascript program queries the server as to the bot's current position, heading, etc. The result is that the student's Spin program sends the SimGPS object things like individual wheel speeds. SimGPS.spin does some wheel (or thruster) odometry and responds to the user's Spin program with lat/long/course/speed/time info, as if it were getting this data from a real GPS. At the same time, the bot's track is overlain on Google Earth in real-time, so the student can see how well his/her program is performing.
Here's a sample of the Google Earth display:
The red line is the desired track between waypoints (in this case, three, plus the starting point). The yellow line is the student's actual track. The green circle with the arrow is the student's simulated bot, showing its position and heading. The waypoints and viewpoint are specified in the main program's DAT section, along with maximum wheel speed, wheel spacing, drift (wind, current) speed and direction, and inertia. Here's the program that runs this simulation:
CON
_clkmode = xtal1 + pll16x
_xinfreq = 5_000_000
NSEGMENTS = 1
OBJ
gps : "SimGPS"
math : "GPS Math"
VAR
long latitude, longitude, speed, course, heading, distance, bearing
byte year, month, day, hours, minutes, seconds
byte nmea_buffer[200]
PUB start | dy, dx, angle_dif, i, j, wpt_lat, wpt_long
gps.start(@parameter_list, true)
gps.wheel_speed(1000, 1000)
gps.start_sim
repeat j from 0 to nwaypoints - 1
repeat i from 0 to NSEGMENTS - 1
wpt_lat := waypoints[j * 2] + (waypoints[j * 2 + 2] - waypoints[j * 2]) * i / NSEGMENTS
wpt_long := waypoints[j * 2 + 1] + (waypoints[j * 2 + 3] - waypoints[j * 2 + 1]) * i / NSEGMENTS
repeat
gps.get_position(@latitude)
bearing := math.bearing(latitude, longitude, wpt_lat, wpt_long)
gps.set_heading(bearing)
distance := math.distance_m(latitude, longitude, wpt_lat, wpt_long)
show_stats
until (distance =< 1 - (i < 10))
gps.stop_sim
repeat
PUB show_stats
gps.str(string("Heading is "))
gps.decf(heading, 1)
gps.str(string("° Bearing is "))
gps.decf(bearing, 1)
gps.str(string("° Course is "))
gps.decf(course, 1)
gps.str(string("° Target distance is "))
gps.dec(distance)
gps.str(string(" meters"))
gps.show_text
DAT
parameter_list
wheel_spacing_mm long 400 'mm
max_mm_per_sec long 4000 'mm/sec
drift_speed long 1000 'mm/sec
drift_dir long 1350 'tenths of a degree from true north
inertia long 0 '0 (no inertia) to 100 (inputs have no effect)
viewpoint long 48_108022, -122_769162, 500 'millionths of a degree
nwaypoints long 4 'number of waypoints > 1
waypoints long 48_107269, -122_771633, 48_108775, -122_766691 'millionths of a degree
long 48_108805, -122_767783, 48_108038, -122_770513
The lesson parameters are given in the DAT section. In this lesson, there's a strong wind blowing from the NW. The program demonstrates the simple technique of always aiming towards the next waypoint -- with the obvious consequence that it doesn't stay glued to the desired track. I gave the students the gps.set_heading method to get them started. But they will have to abandon it eventually and use the gps.wheel_speed method exclusively, just as they will for their ASVs come May.
After I started this project, I heard that Google has deprecated the Google Earth API and it will go away come December. They haven't said what they're replacing it with, so I had to go ahead and finish the project anyway. The installer for SimGPS is attached below. It installs SimGPS.exe and (to the Propeller Tool Library folder) the required external Spin objects. There's not much in the way of documentation yet, but I think most of the functionality can be inferred from the example program.
-Phil
861 x 668 - 1M

Comments
Plywood Grasshopper
Thanks for sharing!
Can we use this method in order to make an outdoor Robot to draw something (using a marker or a chalk) in a large area (like a school yard)?
Nikos, my program could simulate the drawing as practice, prior to actually doing it outdoors with a real GPS. The simulation doesn't have a "pen up/down" function, though.
BTW, the program will work with any Propeller board; it doesn't have to be an ActivityBot or Board. However, if you do use an actual robot, it might be fun to incorporate wheel movements with it on a test stand. It would appear rather like a dog having a dream.
-Phil
Sign me up for your class too! Can I be on erco's team? I'll buy the beer for the "discussion" sessions!
-Phil
CON _clkmode = xtal1 + pll16x _xinfreq = 5_000_000 NSEGMENTS = 1 OBJ gps : "SimGPS" math : "GPS Math" VAR long latitude, longitude, speed, course, heading, distance, bearing byte year, month, day, hours, minutes, seconds byte nmea_buffer[200] PUB start | dy, dx, angle_dif, i, j, wpt_lat, wpt_long gps.start(@parameter_list, true) gps.wheel_speed(1000, 1000) gps.start_sim repeat j from 0 to nwaypoints - 1 repeat i from 0 to NSEGMENTS - 1 wpt_lat := waypoints[j * 2] + (waypoints[j * 2 + 2] - waypoints[j * 2]) * i / NSEGMENTS wpt_long := waypoints[j * 2 + 1] + (waypoints[j * 2 + 3] - waypoints[j * 2 + 1]) * i / NSEGMENTS repeat gps.get_position(@latitude) bearing := math.bearing(latitude, longitude, wpt_lat, wpt_long) gps.set_heading(bearing) distance := math.distance_m(latitude, longitude, wpt_lat, wpt_long) show_stats while (distance) gps.stop_sim repeat PUB show_stats gps.str(string("Heading is ")) gps.decf(heading, 1) gps.str(string("° Bearing is ")) gps.decf(bearing, 1) gps.str(string("° Course is ")) gps.decf(course, 1) gps.str(string("° Target distance is ")) gps.dec(distance) gps.str(string(" meters")) gps.show_text DAT parameter_list wheel_spacing_mm long 400 'mm max_mm_per_sec long 1000 'mm/sec drift_speed long 0 'mm/sec drift_dir long 0 'tenths of a degree from true north inertia long 0 '0 (no inertia) to 100 (inputs have no effect) viewpoint long 38_812752, -121_296161, 232 'millionths of a degree nwaypoints long 6 'number of waypoints > 1 waypoints long 38_812977, -121_296461, 38_812677, -121_296813 'millionths of a degree long 38_812433, -121_296180, 38_812822, -121_295664 long 38_813216, -121_296133, 38_812977, -121_296461-Phil